You said you got it working. Post the file that works.
1 Like
Sorry I thought I was being clever but I guess I was being vague.
I posted that I got it working, and I had a screenshot of inav configurator.
I never got it working under ardupilot. It worked in inav.
But it doesn’t matter because it failed under inav a few days later, along with the message:
Arming disabled flags: NAV HWFAIL RX CLI DSHOTBEEPER
I tested it with 2 Rxs and a different FC.
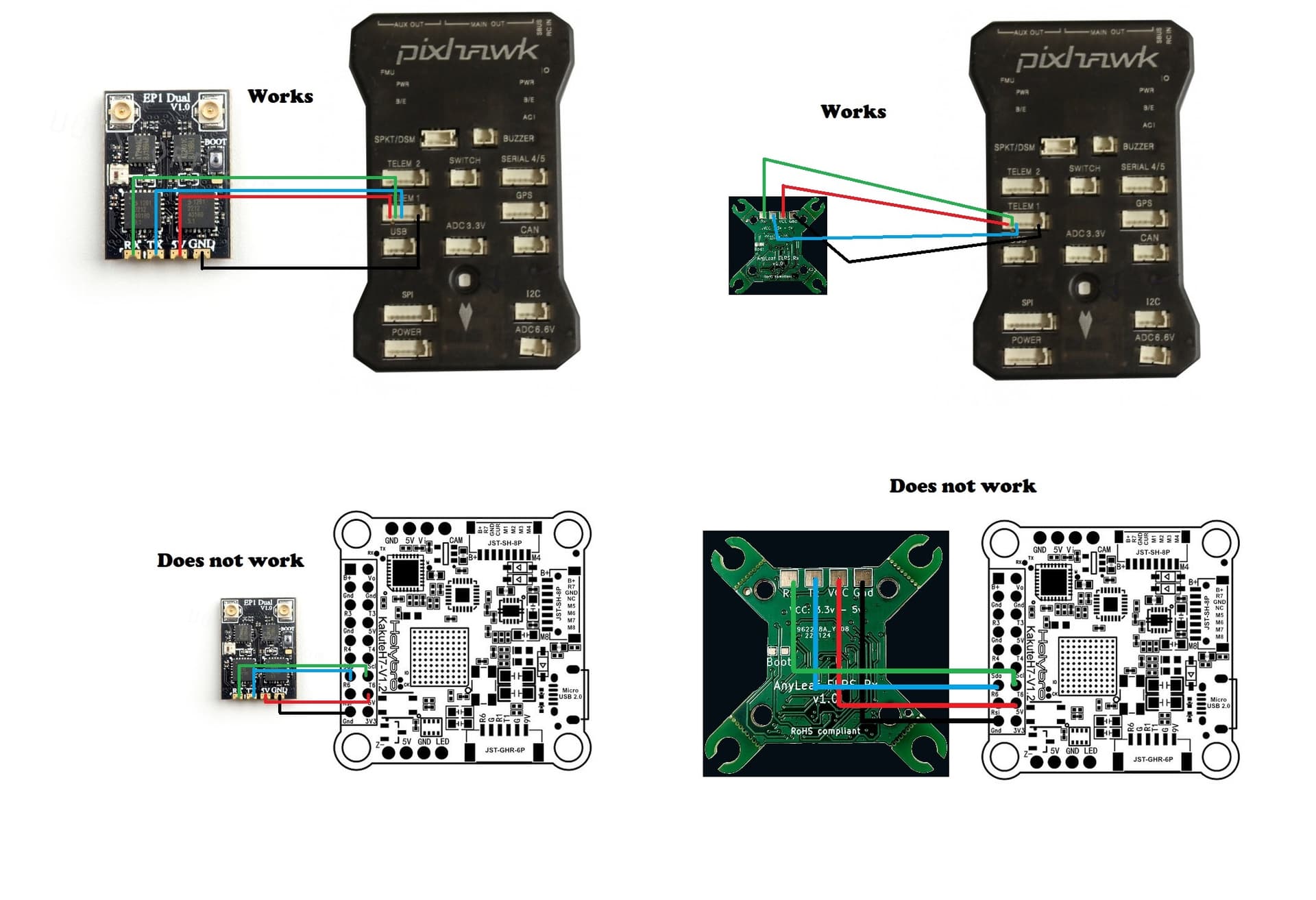
The way I see it there’s no way two different Rxs could refuse to connect with one working FC and not another (working) FC. It’s more likely that the FC they can’t connect to has a hardware issue, like the configurator error message indicates.
I have contacted Holybro support and I’ll update you all about whether they fix this FC or mail me a new one. Or maybe they’ll leave me hanging SOL. Regardless I’ll post what they do.
The table below explains which bit is responsible for which .bin dataflash log message(s):
| LOG_BITMASK | |||||
|---|---|---|---|---|---|
| Message | description | Log rate | field name | bit | value |
| SIDD | System ID data | SCHED_LOOP_RATE / 1 | ATTITUDE_FAST and ATTITUDE_MED | 1 and 0 | 3 |
| SCHED_LOOP_RATE / 2 | ATTITUDE_FAST | 0 | 2 | ||
| SCHED_LOOP_RATE / 4 | ATTITUDE_MED | 0 | 1 | ||
| SCHED_LOOP_RATE / 8 | - | - | 0 | ||
| SIDS | System ID settings | SCHED_LOOP_RATE / 1 | ATTITUDE_FAST and ATTITUDE_MED | 1 and 0 | 3 |
| SCHED_LOOP_RATE / 2 | ATTITUDE_FAST | 0 | 2 | ||
| SCHED_LOOP_RATE / 4 | ATTITUDE_MED | 0 | 1 | ||
| SCHED_LOOP_RATE / 8 | - | - | 0 | ||
| RATE | Desired and achieved vehicle attitude rates | SCHED_LOOP_RATE / 1 | ATTITUDE_FAST and ATTITUDE_MED | 1 and 0 | 3 |
| SCHED_LOOP_RATE / 2 | ATTITUDE_FAST | 0 | 2 | ||
| SCHED_LOOP_RATE / 4 | ATTITUDE_MED | 0 | 1 | ||
| SCHED_LOOP_RATE / 8 | - | - | 0 | ||
| ATSC | Scale factors for attitude controller | SCHED_LOOP_RATE / 1 | ATTITUDE_FAST and ATTITUDE_MED | 1 and 0 | 3 |
| SCHED_LOOP_RATE / 2 | ATTITUDE_FAST | 0 | 2 | ||
| SCHED_LOOP_RATE / 4 | ATTITUDE_MED | 0 | 1 | ||
| SCHED_LOOP_RATE / 8 | - | - | 0 | ||
| ATT | Canonical vehicle attitude | SCHED_LOOP_RATE | ATTITUDE_FAST | 0 | 1 |
| 10 Hz | ATTITUDE_MED | 1 | 2 | ||
| IMU | Inertial Measurement Unit data | SCHED_LOOP_RATE | IMU_FAST and ATTITUDE_FAST | 18 and 0 | 262145 |
| 25 Hz | IMU | 7 | 128 | ||
| GPS | Information received from GNSS systems attached to the autopilot | ~ 5 Hz | GPS | 2 | 4 |
| GPA | GPS accuracy information | ||||
| UBX1 | uBlox-specific GPS information (part 1) | ||||
| UBX2 | uBlox-specific GPS information (part 2) | ||||
| GRAW | Raw uBlox datas | ||||
| GRXH | Raw uBlox data - header | ||||
| GRXS | Raw uBlox data - space-vehicle data | ||||
| TERR | Terrain database information | ||||
| PM | autopilot system performance and general data dumping ground | 1 Hz | PM | 3 | 8 |
| XKF0 | EKF3 beacon sensor diagnostics | 25Hz if ATTITUDE_FAST is set, else 10Hz | - | - | - |
| XKF1 | EKF3 estimator outputs | ||||
| XKF2 | EKF3 estimator secondary outputs | ||||
| XKF3 | EKF3 innovations | ||||
| XKF4 | EKF3 variances | ||||
| XKF5 | EKF3 Sensor innovations (primary core) and general dumping ground | ||||
| XKFS | EKF3 sensor selection | ||||
| XKQ | EKF3 quaternion defining the rotation from NED to XYZ (autopilot) axes | ||||
| XKV1 | EKF3 State variances (primary core) | ||||
| XKV2 | more EKF3 State Variances (primary core) | ||||
| XKT | EKF3 timing information | ||||
| AHR2 | Backup AHRS data | ||||
| POS | Canonical vehicle position | ||||
| CTRL | Attitude Control oscillation monitor diagnostics | 10Hz | CTUN | 4 | 16 |
| RFND | Rangefinder sensor information | ||||
| PRX | Proximity Filtered sensor data | ||||
| PRXR | Proximity Raw sensor data | ||||
| BCN | Beacon information | ||||
| CTUN | Control Tuning information | 100Hz | |||
| PSCN | Position Control North | 10Hz | NTUN | 5 | 32 |
| PSCD | Position Control Down | ||||
| PSCE | Position Control East | ||||
| RCIN | RC input channels to vehicle | 10Hz | RCIN | 6 | 64 |
| RCI2 | (More) RC input channels to vehicle | ||||
| RSSI | Received Signal Strength Indicator for RC receiver | ||||
| VIBE | Processed (acceleration) vibration information | 10Hz | IMU or IMU_FAST or IMU_RAW | 19 or 18 or 7 | - |
| CMD | Executed mission command information | on event | CMD | 8 | 256 |
| MAVC | MAVLink command we have just executed | ||||
| BAT | Gathered battery data | ?? | CURRENT | 9 | 512 |
| BCL | Battery cell voltage information | ||||
| MCU | MCU voltage and temperature monitoring | ||||
| POWR | System power information | ||||
| RCOU | Servo channel output values 1 to 14 | 10Hz | RCOUT | 10 | 1024 |
| RCO2 | Servo channel output values 15 to 18 | ||||
| RCO3 | Servo channel output values 19 to 32 | ||||
| OF | Optical flow sensor data | ?? | OPTFLOW | 11 | 2048 |
| PIDN | Proportional/Integral/Derivative gain values for North | SCHED_LOOP_RATE if ATTITUDE_FAST is set else 10Hz | NTUN and PID | 12 and 5 | 4128 |
| PIDE | Proportional/Integral/Derivative gain values for East | ||||
| PIDR | Proportional/Integral/Derivative gain values for Roll | SCHED_LOOP_RATE if ATTITUDE_FAST is set else 10Hz | PID | 12 | 4096 |
| PIDP | Proportional/Integral/Derivative gain values for Pitch | ||||
| PIDY | Proportional/Integral/Derivative gain values for Yaw | ||||
| PIDA | Proportional/Integral/Derivative gain values for Altitude | ||||
| MAG | Information received from compasses | ?? | COMPASS | 13 | 8192 |
| CAM | Camera shutter information | on event | CAMERA | 15 | 32768 |
| TRIG | Camera shutter information | ||||
| MOTB | Motor mixer information | 10Hz | MOTBAT | 17 | 131072 |
| ACC | IMU accelerometer data | SCHED_LOOP_RATE | IMU_RAW | 19 | 524288 |
| GYR | IMU gyroscope data | ||||
| VSTB | Motor mixer information | SCHED_LOOP_RATE | VIDEO_STABILISATION | 20 | 1048576 |
| FTN | Filter Tuning Message - per motor | SCHED_LOOP_RATE | FTN_FAST | 21 | 2097152 |
| FTNS | Filter Tuning Message | ||||
| FTN1 | FFT Filter Tuning | 25 Hz | |||
| WINC | Winch | 10Hz | Any | any | any |
2 Likes
Hi Amilcarlucas,I have just dug out my Taycan 3 inch quad and order a Matek H743 Slim and a T motor 45amp 4 in1 Esc from 3DXR so this project will be in full swing soon and im hoping to also use a Helical GPS set up,expect many questions,also later I may require a script from you to allow me to set up drone ID,and once again thank you for all your hard work.
p/s how long flight time do you get on an 4s x1800 on the TayCan
Unfortunately only 5 Minutes ![]() Martin.
Martin.
1 Like
I may try and make a 4s x 4500 li on batt aout 35 amp and see how it goes but 1st need to get it flying in Ardupilot
We tried 5000mAh and got warmer motors with only 7 Minutes flight. Not worth the extra 2 Minutes IMHO.
1 Like
I have been looking forward to this so called “pause and resume” autotune for sometime.
Autotune with Position hold, interesting, was this added recently? Is it also only available under 4.4.x and above?
AUTOTUNE_AXES,8, I do not see it in 4.4.4 full parameter list, I think is a new function in 4.5.x and above. What improvement will Yaw and YawD be different from the past autotune?
AFAIK that is available since 4.1.x
That was introduced in 4.3.x. It improves yaw response-time, but requires special tuning care.
1 Like
| Message | Description | Log rate | LOG_BITMASK field name | bit | value |
|---|---|---|---|---|---|
| ACC | IMU accelerometer data | SCHED_LOOP_RATE | IMU_RAW | 19 | 524288 |
| AHR2 | Backup AHRS data | 25Hz if ATTITUDE_FAST is set, else 10Hz | - | - | - |
| ATSC | Scale factors for attitude controller | SCHED_LOOP_RATE / 1 | ATTITUDE_FAST and ATTITUDE_MED | 1 and 0 | 3 |
| ATSC | Scale factors for attitude controller | SCHED_LOOP_RATE / 2 | ATTITUDE_FAST | 0 | 2 |
| ATSC | Scale factors for attitude controller | SCHED_LOOP_RATE / 4 | ATTITUDE_MED | 0 | 1 |
| ATSC | Scale factors for attitude controller | SCHED_LOOP_RATE / 8 | - | - | 0 |
| ATT | Canonical vehicle attitude | SCHED_LOOP_RATE | ATTITUDE_FAST | 0 | 1 |
| ATT | Canonical vehicle attitude | 10 Hz | ATTITUDE_MED | 1 | 2 |
| BAT | Gathered battery data | ?? | CURRENT | 9 | 512 |
| BCL | Battery cell voltage information | ?? | CURRENT | 9 | 512 |
| BCN | Beacon information | 10Hz | CTUN | 4 | 16 |
| CAM | Camera shutter information | on event | CAMERA | 15 | 32768 |
| CMD | Executed mission command information | on event | CMD | 8 | 256 |
| CTRL | Attitude Control oscillation monitor diagnostics | 10Hz | CTUN | 4 | 16 |
| FTN | Filter Tuning Message - per motor | SCHED_LOOP_RATE | FTN_FAST | 21 | 2097152 |
| FTN1 | FFT Filter Tuning | 25 Hz | FTN_FAST | 21 | 2097152 |
| FTNS | Filter Tuning Message | SCHED_LOOP_RATE | FTN_FAST | 21 | 2097152 |
| GPA | GPS accuracy information | ~ 5 Hz | GPS | 2 | 4 |
| GPS | Information received from GNSS systems attached to the autopilot | ~ 5 Hz | GPS | 2 | 4 |
| GRAW | Raw uBlox datas | ~ 5 Hz | GPS | 2 | 4 |
| GRXH | Raw uBlox data - header | ~ 5 Hz | GPS | 2 | 4 |
| GRXS | Raw uBlox data - space-vehicle data | ~ 5 Hz | GPS | 2 | 4 |
| GYR | IMU gyroscope data | SCHED_LOOP_RATE | IMU_RAW | 19 | 524288 |
| IMU | Inertial Measurement Unit data | SCHED_LOOP_RATE | IMU_FAST and ATTITUDE_FAST | 18 and 0 | 262145 |
| IMU | Inertial Measurement Unit data | 25 Hz | IMU | 7 | 128 |
| MAG | Information received from compasses | ?? | COMPASS | 13 | 8192 |
| MAVC | MAVLink command we have just executed | on event | CMD | 8 | 256 |
| MCU | MCU voltage and temperature monitoring | ?? | CURRENT | 9 | 512 |
| MOTB | Motor mixer information | 10Hz | MOTBAT | 17 | 131072 |
| OF | Optical flow sensor data | ?? | OPTFLOW | 11 | 2048 |
| PIDA | Proportional/Integral/Derivative gain values for Altitude | SCHED_LOOP_RATE if ATTITUDE_FAST is set else 10Hz | PID | 12 | 4096 |
| PIDE | Proportional/Integral/Derivative gain values for East | SCHED_LOOP_RATE if ATTITUDE_FAST is set else 10Hz | NTUN and PID | 12 and 5 | 4128 |
| PIDN | Proportional/Integral/Derivative gain values for North | SCHED_LOOP_RATE if ATTITUDE_FAST is set else 10Hz | NTUN and PID | 12 and 5 | 4128 |
| PIDP | Proportional/Integral/Derivative gain values for Pitch | SCHED_LOOP_RATE if ATTITUDE_FAST is set else 10Hz | PID | 12 | 4096 |
| PIDR | Proportional/Integral/Derivative gain values for Roll | SCHED_LOOP_RATE if ATTITUDE_FAST is set else 10Hz | PID | 12 | 4096 |
| PIDY | Proportional/Integral/Derivative gain values for Yaw | SCHED_LOOP_RATE if ATTITUDE_FAST is set else 10Hz | PID | 12 | 4096 |
| PM | autopilot system performance and general data dumping ground | 1 Hz | PM | 3 | 8 |
| POS | Canonical vehicle position | 25Hz if ATTITUDE_FAST is set, else 10Hz | - | - | - |
| POWR | System power information | ?? | CURRENT | 9 | 512 |
| PRX | Proximity Filtered sensor data | 10Hz | CTUN | 4 | 16 |
| PRXR | Proximity Raw sensor data | 10Hz | CTUN | 4 | 16 |
| PSCD | Position Control Down | 10Hz | NTUN | 5 | 32 |
| PSCE | Position Control East | 10Hz | NTUN | 5 | 32 |
| PSCN | Position Control North | 10Hz | NTUN | 5 | 32 |
| RATE | Desired and achieved vehicle attitude rates | SCHED_LOOP_RATE / 1 | ATTITUDE_FAST and ATTITUDE_MED | 1 and 0 | 3 |
| RATE | Desired and achieved vehicle attitude rates | SCHED_LOOP_RATE / 2 | ATTITUDE_FAST | 0 | 2 |
| RATE | Desired and achieved vehicle attitude rates | SCHED_LOOP_RATE / 4 | ATTITUDE_MED | 0 | 1 |
| RATE | Desired and achieved vehicle attitude rates | SCHED_LOOP_RATE / 8 | - | - | 0 |
| RCIN | RC input channels to vehicle | 10Hz | RCIN | 6 | 64 |
| RCI2 | (More) RC input channels to vehicle | 10Hz | RCIN | 6 | 64 |
| RCO2 | Servo channel output values 15 to 18 | 10Hz | RCOUT | 10 | 1024 |
| RCO3 | Servo channel output values 19 to 32 | 10Hz | RCOUT | 10 | 1024 |
| RCOU | Servo channel output values 1 to 14 | 10Hz | RCOUT | 10 | 1024 |
| RFND | Rangefinder sensor information | 10Hz | CTUN | 4 | 16 |
| RSSI | Received Signal Strength Indicator for RC receiver | 10Hz | RCIN | 6 | 64 |
| SIDD | System ID data | SCHED_LOOP_RATE / 1 | ATTITUDE_FAST and ATTITUDE_MED | 1 and 0 | 3 |
| SIDD | System ID data | SCHED_LOOP_RATE / 2 | ATTITUDE_FAST | 0 | 2 |
| SIDD | System ID data | SCHED_LOOP_RATE / 4 | ATTITUDE_MED | 0 | 1 |
| SIDD | System ID data | SCHED_LOOP_RATE / 8 | - | - | 0 |
| SIDS | System ID settings | SCHED_LOOP_RATE / 1 | ATTITUDE_FAST and ATTITUDE_MED | 1 and 0 | 3 |
| SIDS | System ID settings | SCHED_LOOP_RATE / 2 | ATTITUDE_FAST | 0 | 2 |
| SIDS | System ID settings | SCHED_LOOP_RATE / 4 | ATTITUDE_MED | 0 | 1 |
| SIDS | System ID settings | SCHED_LOOP_RATE / 8 | - | - | 0 |
| TERR | Terrain database information | ~ 5 Hz | GPS | 2 | 4 |
| TRIG | Camera shutter information | on event | CAMERA | 15 | 32768 |
| UBX1 | uBlox-specific GPS information (part 1) | ~ 5 Hz | GPS | 2 | 4 |
| UBX2 | uBlox-specific GPS information (part 2) | ~ 5 Hz | GPS | 2 | 4 |
| VIBE | Processed (acceleration) vibration information | 10Hz | IMU or IMU_FAST or IMU_RAW | 19 or 18 or 7 | - |
| VSTB | Motor mixer information | SCHED_LOOP_RATE | VIDEO_STABILISATION | 20 | 1048576 |
| WINC | Winch | 10Hz | Any | any | any |
| XKF0 | EKF3 beacon sensor diagnostics | 25Hz if ATTITUDE_FAST is set, else 10Hz | - | - | - |
| XKF1 | EKF3 estimator outputs | 25Hz if ATTITUDE_FAST is set, else 10Hz | - | - | - |
| XKF2 | EKF3 estimator secondary outputs | 25Hz if ATTITUDE_FAST is set, else 10Hz | - | - | - |
| XKF3 | EKF3 innovations | 25Hz if ATTITUDE_FAST is set, else 10Hz | - | - | - |
| XKF4 | EKF3 variances | 25Hz if ATTITUDE_FAST is set, else 10Hz | - | - | - |
| XKF5 | EKF3 Sensor innovations (primary core) and general dumping ground | 25Hz if ATTITUDE_FAST is set, else 10Hz | - | - | - |
| XKFS | EKF3 sensor selection | 25Hz if ATTITUDE_FAST is set, else 10Hz | - | - | - |
| XKQ | EKF3 quaternion defining the rotation from NED to XYZ (autopilot) axes | 25Hz if ATTITUDE_FAST is set, else 10Hz | - | - | - |
| XKT | EKF3 timing information | 25Hz if ATTITUDE_FAST is set, else 10Hz | - | - | - |
| XKV1 | EKF3 State variances (primary core) | 25Hz if ATTITUDE_FAST is set, else 10Hz | - | - | - |
| XKV2 | more EKF3 State Variances (primary core) | 25Hz if ATTITUDE_FAST is set, else 10Hz | - | - | - |
3 Likes
Is the entire guide in the Wiki now?
2 Likes
Wow, awesome job! these little guys have been an enigma when it came to ArduCopter. @amilcarlucas, what is the reasoning behind the two switch flight mode setup in lieu of the 6P switch? thanks.
Simply pilot preference. The 6 flight mode buttons in the middle of the TX16S are not easily reached
I agree with you there.
Updated Section 9: wind estimation
1 Like
Besides flashing a firmware of each vehicle type to the board to get the full complete initial default parameters that come with each version of the firmware, is there another way to get it?
You can use the extract_param_defaults.py python script provided in the diatone_taycan_mxc.zip file above to extract default.parm files from a .bin dataflash log
./extract_param_defaults.py bin_filename -s missionplanner > defaults.param
I added documentation links to all .bin log file messages in the posts above.
3 Likes
Re-ordered the steps to support both smaller and bigger vehicles.
4 Likes