I was reading through the Ardupilot section on quad planes, and it had this to say: "For larger QuadPlanes it is common to need to deliberately tilt the motors by a couple of degrees to increase yaw authority. Interested in folks thoughts on that. Getting the tilts identical could be challenging
Second, I am thinking Mike’s dual battery system is really smart. One, you’re assured of adequate VTOL battery at the end of the flight (or emergency landing part way through) Two, you can make use of the Cube’s redundant power supply capabilities. Three, you can optimize battery chemistry-Li-Po for hovering because of high discharge current, and Li-Ion for cruising because of high power density. I wonder if the Mauch Power-Cube Dual Battery Kit would work with two different chemistries?
Hi Mike -
I was reviewing your params in detail, and noticed you selected
AHRS_EKF_TYPE = 2,and EK3_ENABLE 0
Was there a reason for preferring EKF2? v curious
Hi Mike,
lol, no problem, just curious. obviously it flies great.
I just got my kit yesterday - minus the PNP bits (motors, props, ESCs etc). Evidently those shipped in a different package, and are held up due to some kind of “magnetic inspection” strangeness. At least I can start on the airframe this weekend.
hey guys - my Hero kit only came with one of the wing root reinforcing sheets, need two obviously. It’s not really practical to go back to UAVmodel and have them ship another from China. Does anyone know what it is exactly? The sheet I have says 3M, but not a material identification. I’m hoping to source in the US
Also, what is the purpose of the 1/2" or 13mm hole in the fuselage just behind and below the wing trailing edge? I am hoping to use it for Herelink upgraded antenna mount. But if it’s for cooling or something I"ll think of something else. Its the perfect size, and a bit closer to the rx deck than the built-in side antenna hole
Hero’s reinforcement sticker may have been lost during the customs opening inspection. You can use other reinforcement stickers instead.
If there is no reinforcement sticker, you can also use fiber tape to wrap the reinforcement.
The small hole at the back of the fuselage is prepared for the image transmission antenna, the inspection head also has 2 holes on the installation position can be selected.
I’d vastly prefer to use the same reinforcement sticker, as it looks a lot nicer than fiber tape!
Can you please tell me what 3M product number it is?? I’m sure I can find it here in the US
Hi Mike, birdperson -
I would appreciate your operational insights into battery sizing.
I’m currently looking at two batteries (both use AS 150 connectors and 10 ga wire):
Tattu 25Ah 10C, weighing 2.54 kg This would have a max sustained current of 250A
Tattu 28Ah 25C, weighing 3.41 kg This would have a max sustained current of 700A (if you believe that!)
The 4 lift motor ESCs are 50A ea (200A) and the cruise motor ESC is 80A
It seems that the VTOL-fwd transition current draw could exceed the smaller battery capacity.
I’d really like to use the smaller battery, but don’t want to undersize it. Can you share your max power draws especially during transition?
Also, the AS150 connector seems undersized for both of them (150A max sustained). Is it worthwhile to replace the AS150 with 8mm (good for 190A) since the 10 ga is good for 250A?
Hi @PaulSt - apologies for the slow reply - I only just saw this. As @manavgandhi17 stated - there is no way you should be reaching those kind of current draws. I normally use a 6S 30 Ah 5C without any issues.
@makeflyeasy Hi.
What voltage cut off pre configured on MFE 6S 100A ESC 6100 ESC?
This is stock esc for Hero VTOL, and i cannot find way to configure parameters, such as: battery type, cutt off voltage, airbrake…
Can i use it with LI-ION battery?
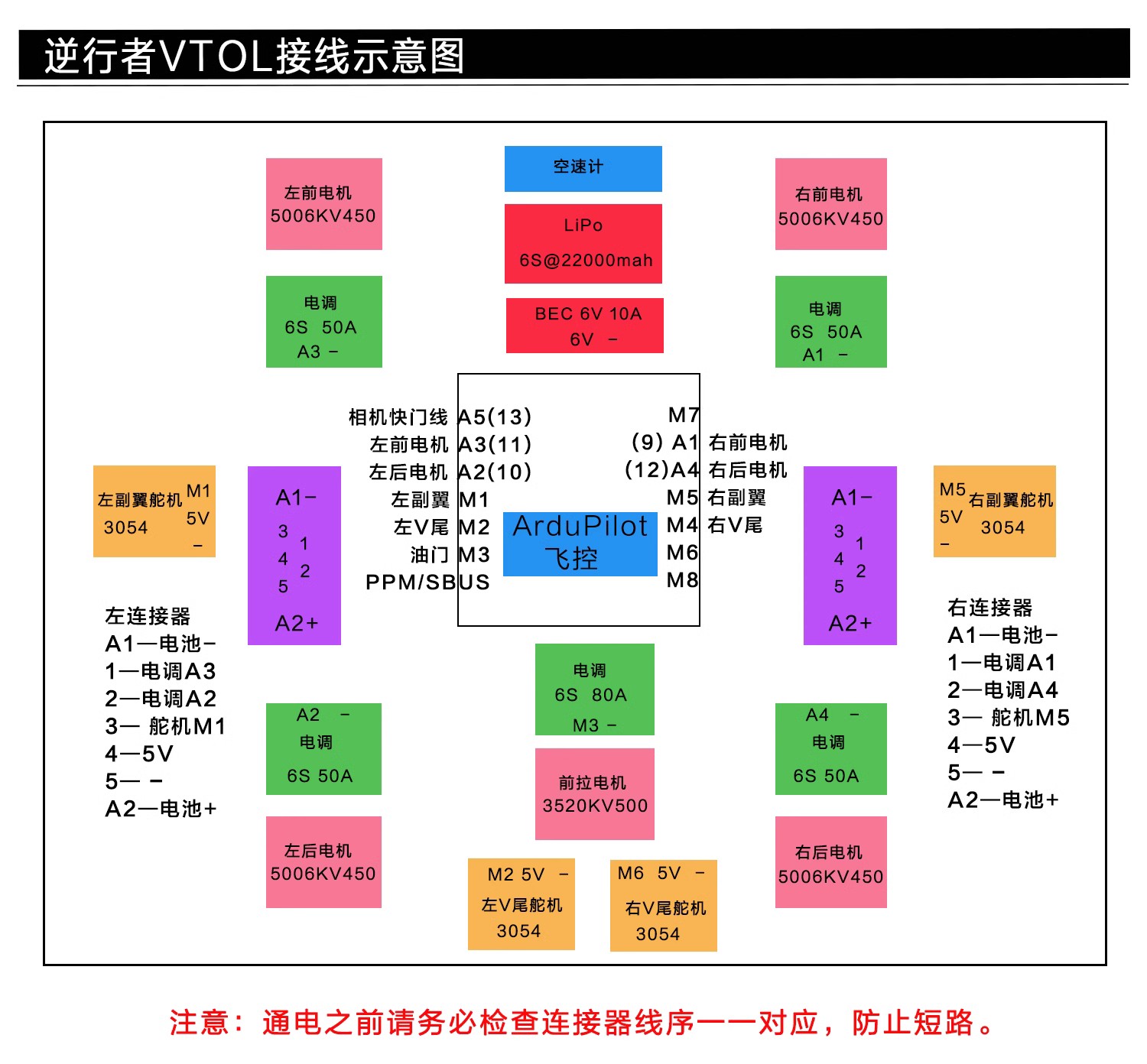
I set a controller using Pixhawk instead of Pixsurvey in my Hero.
But, I cannot find pinout for pixhawk in your video.
Can I get a pin assign for servos and motor for hero model?
I built up my hero as PNP version.
I tested QStable, QHold and QLoiter as yiur reference PID value for hero.
I used 6s 16000mah and no payload. I bananced center of gravity.
For the test result, I felt very sharp vibration on hovering. I think PID values are acceptable, because My hero well-followed movement the target roll/pitch.