I believe that… but I need it working now. Btw, does proficnc have any plan to build a flight controller weighing around 10g, like Kakute F7? And, so, I can understand that CAN is the only interface, right?
I tried with 3.7 and 3.6.7. It worked for a while but I can’t make it work again… take a look at my post:
This is killing me… ![]()
Just CAN…
Maybe one day… but hard to justify
well, I guess you would have to have a e.g. TFMini in addition to see/judge the effect
like that I could say that you actually see it given that the blue curves makes significant wiggles exactly always when you bank … 
LOL
you guys are really funny, now all of a sudden it is the future … this community can’t really claim to not have missed out the future for many years then, right
![]()
2 Likes
I’ve been working on Can devices for Ardupilot from 2013… it’s awesome that we finally have stuff out there. It’s the work of everyone from 2013 and onwards that has enabled the hardware that exists now.
1 Like
Better late than never
2 Likes
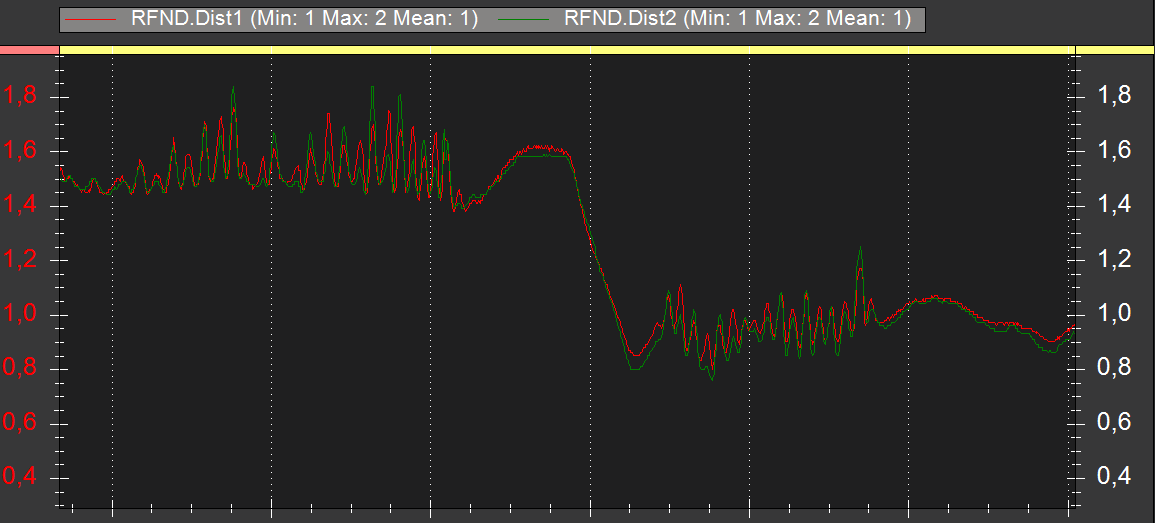
There it is : Rangefinder 1 is VL53L1X and 2 is TFMINI
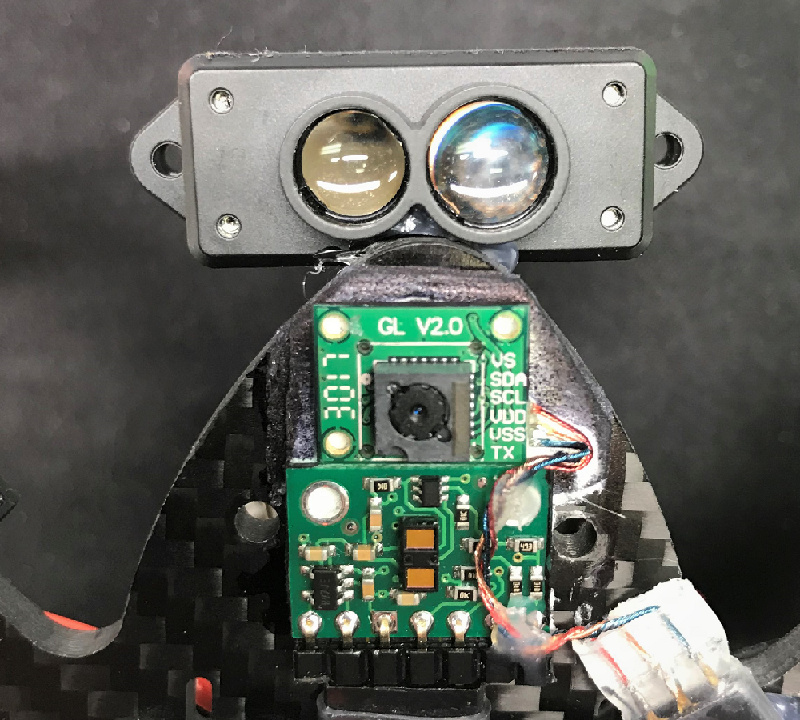
I just kept the RFND signal for clarity, this sequence is during the most extreme manoeuvres at 2 altitudes (1,5 & 1 Metre)
1 Like
To justify you can use the regional laws that forbid any UAV with more than 250g to fly without being registered and have flights informed to the airspace control agency at least 24h before the flight. Soon, pilots will have to be registered and have official training too. I’m working on this subject for the last four years for military purposes. USA, China, Russia, Brazil, England, France etc. already have laws that control the use of drones, and universities are staring restrict experiments with drones due to these laws. There is a group of researchers trying to build reliable and robust under 250g UAVs (using commercial off-the-shelf components) to reduce the security issues with real drone experiments (single or swarms) in remote sensing operations and related tasks. Well… I think ProfiCNC should think about building a 10g flight controller like Kakute F7. Would be great, because you make high quality products. To conclude, as you are thinking about future, as you said about CAN, I think you should consider the growing demand on micro-UAVs too. About HereFlow, I will wait to buy when it have a serial or i2c interface or when exists a micro flight controller that supports it. I hope to see ProfiCNC micro flight controllers soon! 
Thanks @ppoirier! Got to love real data!
@maroquio, that conversation may be best in the ProfiCNC forum, as it’s rather off topic for here… but I understand what you are saying, and don’t disagree. However, that end of the market is saturated.
2 Likes
good job, sir! great to see that
1 Like
I’ve been working on Can devices for Ardupilot from 2013… it’s awesome that we finally have stuff out there. It’s the work of everyone from 2013 and onwards that has enabled the hardware that exists now.
I know that, and others did too, but this exactly proves the point … 5 years of the work of everyone … and that’s where ArduPilot is now … that’s what makes me find it funny … I’m mean I know ![]()
Better late than never
it all and more just could have easily happened at least 1.5 years sooner, but sure, fully agreed, better late than never
https://www.rclineforum.de/forum/wcf/images/smilies/prost.gif
1 Like
For this type of indoor test vehicle, the hereflow would make the perfect choice as it has the right combination of components and CANbus makes connecting so much simpler.
Can you think of any reason that HereFlow would not work with 3DR PixHawk Mini? I have been experimenting with this using Pixhawk1 latest firmware and initial results were good. With EK2_GPS_TYPE=3 (no GPS) it held position pretty well and followed the terrain loosely when flow slowly. I tried to tune the PSC_POSZ_P parameter to tighten that up and started getting (probably unrelated) EK2 errors. Tried to re-calibrate Accel and Compass only to find Compass 2 was not working anymore and Enable Compasses could not be selected. Restoring to default did not help so I took another Pixhawk mini out of the drawer and started over. Still getting EK2 IMU0 has stopped aiding message. Now the second Pixhawk mini also cannot enable compasses.
Update:
Installing Firmware Arducopter V3.6.9 Quad, recovers the ability to calibrate the Compasses.
Hi all~
I use HereFlow sensor in my Copter.
PH4-mini / CAN bus / FW Copter-3.7.0
Set parameter:
FLOW_TYPE= 6 (UAVCAN)
CAN_P1_DRIVER = 1
RNGFND1_TYPE = 24
RNGFND1_MAX_CM = 300
but PreArm: Rangefinder 1 was not detected
and BAD OptFlow Health…

Try to use 3.7-dev from June, 15. After this version, my optical flow don’t work using Kakute F7…
1 Like
Hello.
Hi, I want to learn drones, but I have no programming knowledge.
I want to connect the HEREFLOW to the Fixhawk 2, but I don’t have to do as I say, so can I know what to do?
Flow_type=6
CanP1_Driver=1
RNGFND1_Type=24
RNGFND1_MAX_CM=300
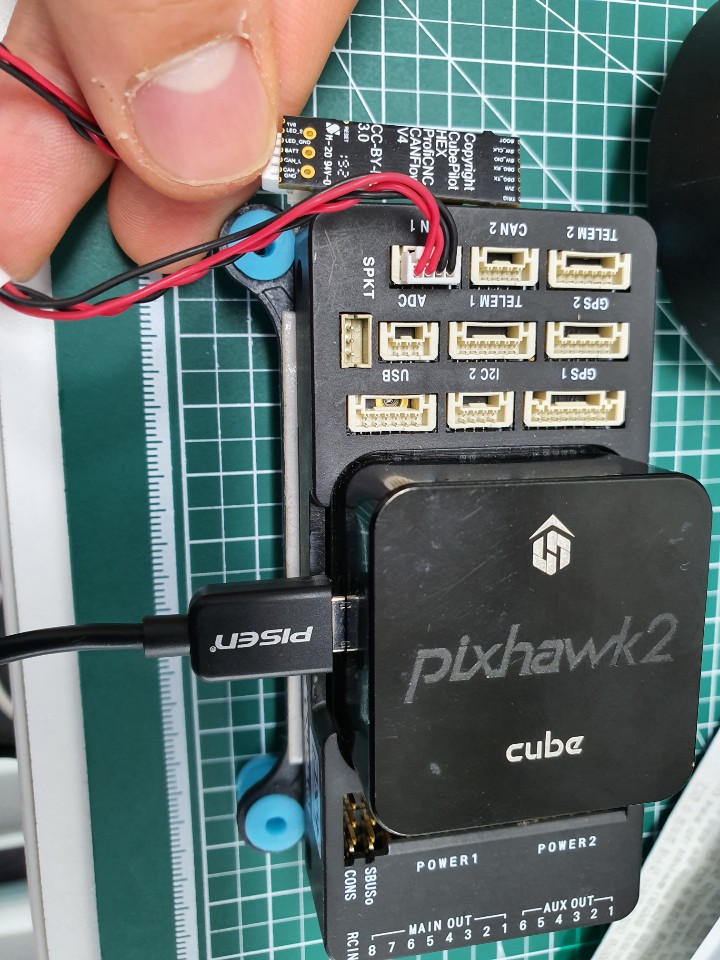
Connect the sensor to the flight controllers’ CAN port (if using a Cube note that pre-Apr 2019 boards have CAN1 and CAN2 swapped)
I checked the value of Herreflow.
I was asked this question because I don’t know much about drones.
I checked the value of Hereflow and I wonder if it will help to hover without adjusting the value of other parameters.
Please let me know if other parameter values need to be adjusted.
Thank you for your reply
I connect Can2 port It’s work.
But I have new problem . https://discuss.ardupilot.org/t/three-kind-of-rangefinder/48034
1 Like