Hello,
I’m trying to figure out why my copter is making some sudden yaws.
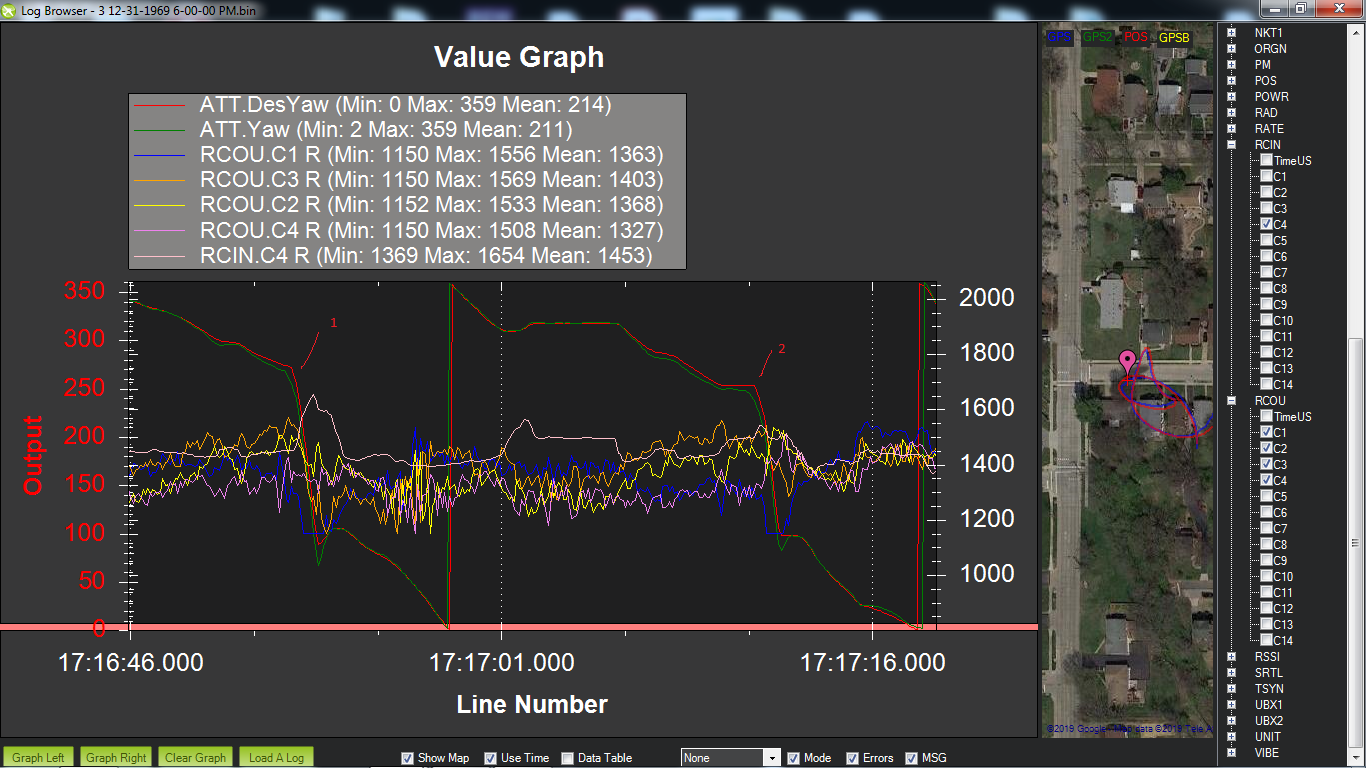
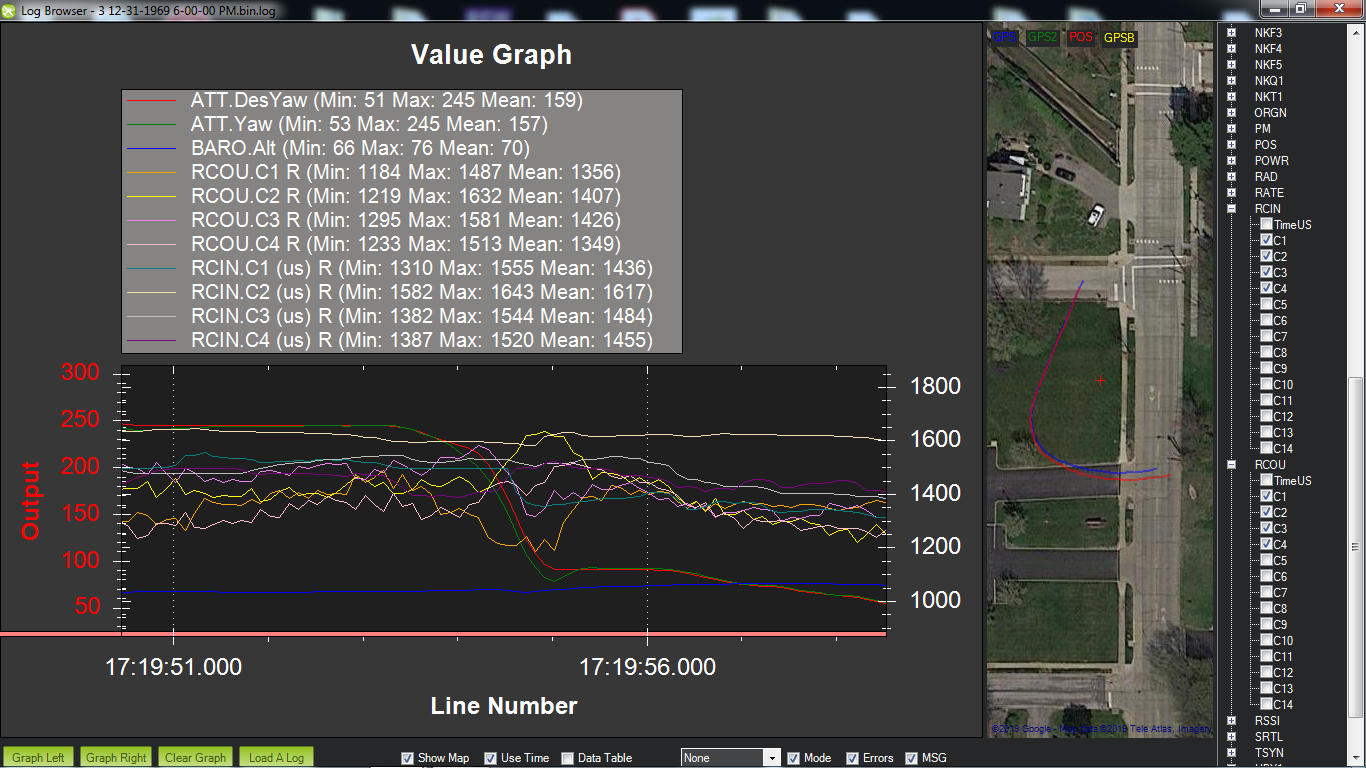
I flew yesterday in stabilize, and three times the copter suddenly spun around. I thought it might be RC reception, or a problem w/ my motors, but I’m not seeing any signs of that in the logs. It looks like the FC is telling it to do it. Yaw and desired yaw are about the same. Two of the times it does it, one motor does go to its minimum throttle, but I’m not sure that’s a problem, since the 3rd time it did it the motor didn’t go to minimum. Plus the motors go to min throttle at other times in the flight, and I don’t have trouble then.
I’m not sure what else to look at.
Thanks for any help
You can see on the screen shots the time in the logs it happens.
The vibrations seem ok. WHAT do you use 2s? - if this is the voltage graph is disturbingly low - a problem with the battery condition or its low current efficiency. I noticed that on the c4 channel there is a triangular signal difficult to create after 19 seconds, and at the same time all engines get a minimum turnover.
The graphs ATT error in roll, pitch and yaw errors are bearable. So it looks like the copter does everything ok you send from the transmitter or you have a problem with the transmitter / receiver / power supply
greetings