Being a complete newbie with the whole RTK thing, after only a week of spending every possible free minute I have wrapping my mind around getting it to work first of all, and then doing some actual tests, I have come to this early conclusion.
Hardware -
Pixhawk2.1 Black Cube HERE+ RTK Rover 4.0
Setup -
I have managed to get a fixed base accuracy of 0.5m which took nearly two hours to achieve.
Rover -
The rover is taken from my hydrone AIMy and physically moved to set locations around my property with a clear view to the sky.
Results - HERE+RTK (0.5m)
a - At the moment the rover arrives at the WPT the accuracy to actual WPT is between 3.8 and 4.2m
b - After a while the location settles and pretty constant 1.3 to 1.8m accuracy is achieved
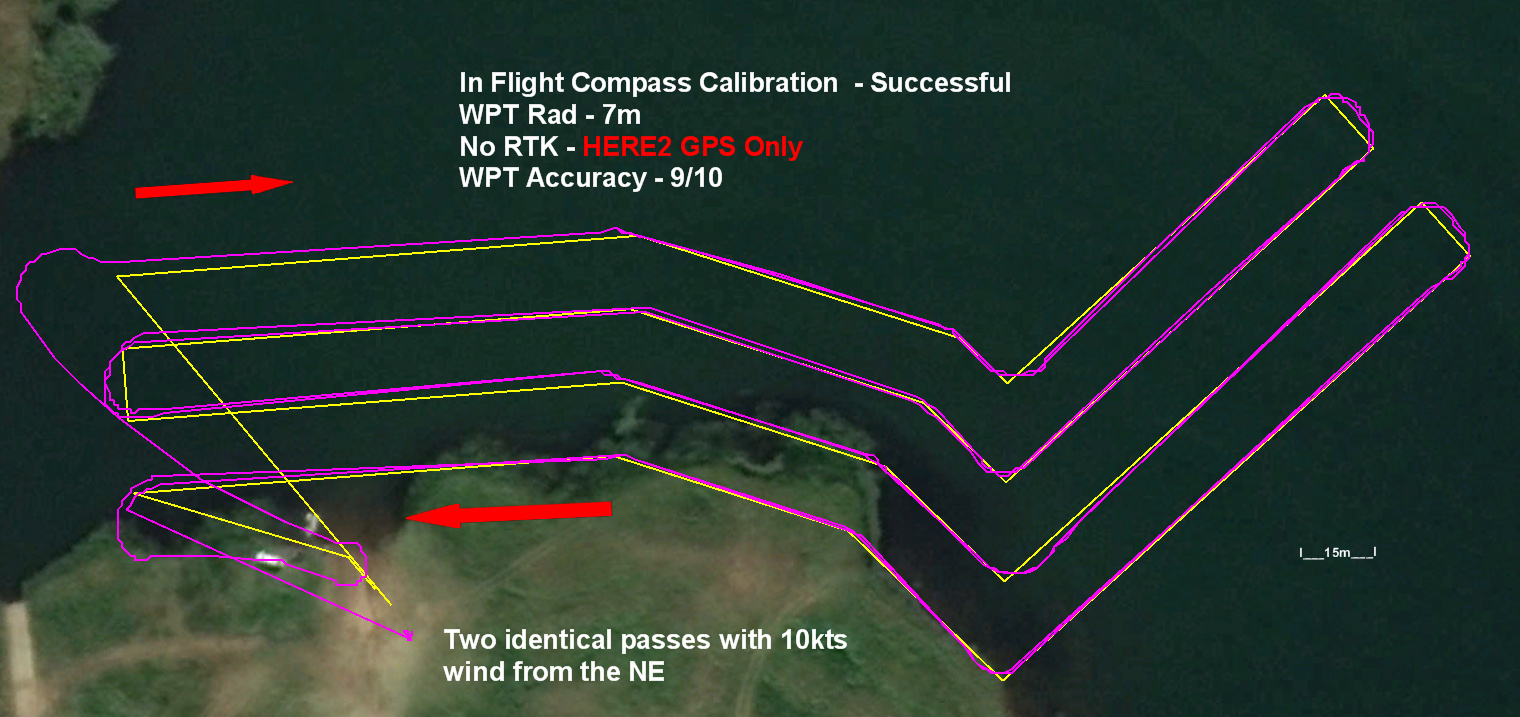
Results - HERE+ NO RTK (GPS only)
a - Initial WPT arrival accuracy is between 7.5m to 8.9m
b - After some time to settle the WPT location accuracy drops to around 5m
Conclusion (at this early stage of my journey)
a - The RTK certainly is more accurate
b - Considering that it is a rover and the craft cannot sit around waiting for the correction data to ‘settle’, the initial WPT arrival accuracy has to be taken so we are looking at around 4m for RTK and 9m for GPS only.
c - I find this extremely disappointing as the correction accuracy I was hoping for was the 0.5m immediately as the craft reaches waypoint after waypoint.
The RTK topic has been discussed a great deal and a search will pull up some very in depth analysis of the whole situation.
What your seeing is about the best you can expect from a single frequency GNSS.
This is where the new UBlox 9 is going to be interesting.
It will bring the price down from the outlandish AU$12K we paid for the Septentrio boards.
Hi Mike,
I have searched this board for many hours / days and cannot find a ‘apples with apples’ comparison which is what I was looking for.
If I have missed it somewhere, please post the link below, thank you.
John
What exactly are you referring to?
Is it L1 only (single frequency) GNSS units?
The Here+ is a single frequency GNSS unit.
If it is then what you are seeing is about as good as it gets for single frequency GNSS units.
It only when you go to multi frequency that you will start to see improvements in positional accuracy and lock time.
You have probably seen these topics but I am just throwing them in here, there maybe one or two you mightn’t have seen.
Hi John,
We had our first real experiments with our RTK system a few weeks ago when doing some trials with our Redclaw Aquaculture feeder prototype.
Our initial impressions were as follows:
(Note that this is just seat of the pants impressions, we didn’t record hard data).
Maximum baseline length between base and rover about 250 metres.
Latitude -17.3 degrees
We have two RTK systems, one is a Polaris Alpha which is single L1 band, the other is a SparkFun GPS-RTK2 using the U-blox ZED-F9P which is dual (L1 and L2) band. We have two units of each to enable us to set up our own base station - rover configuration.
Case A - Polaris Alpha without base station, no RTK
Rapid (<10 minutes) 3d acquisition, accuracy of about +/- 2.5 metres
Case B - Polaris Alpha with Polaris Alpha base station, RTK fix
Slowish RTK fix solution (10-30 minutes), accuracy of about +/- 100 mm
Case C - SparkFun GPS-RTK2 without base station, no RTK
Rapid (<5 minutes) 3d acquisition, , accuracy of about +/- 1.5 metres
Case D - SparkFun GPS-RTK2 with SparkFun GPS-RTK2 base station, RTK fix
Rapid (<10 minutes) RTK fix solution, accuracy of about +/- 20 mm
Case E - SparkFun GPS-RTK2 with Polaris Alpha base station, RTK fix
Slowish (10-20 minutes) RTK fix solution, accuracy of about +/- 100 mm
As Mike has indicated there are other posts with more hard data, but I believe our experience is close to what you should expect.
Mike, yes, most of them I had found, but there are a couple I did not, thank you - certainly a lot of interesting reading.
Bill, in the field testing is certainly the best way to test how these components work.
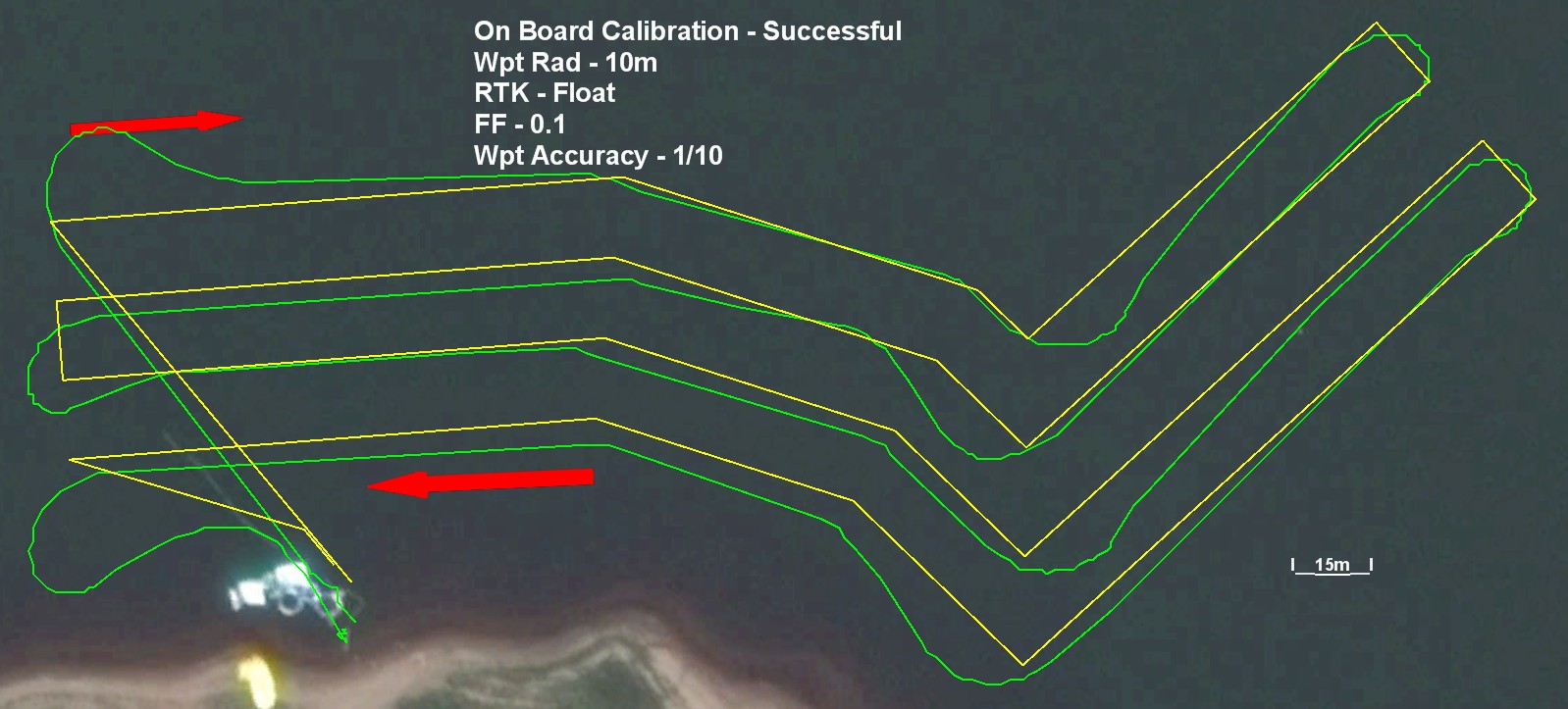
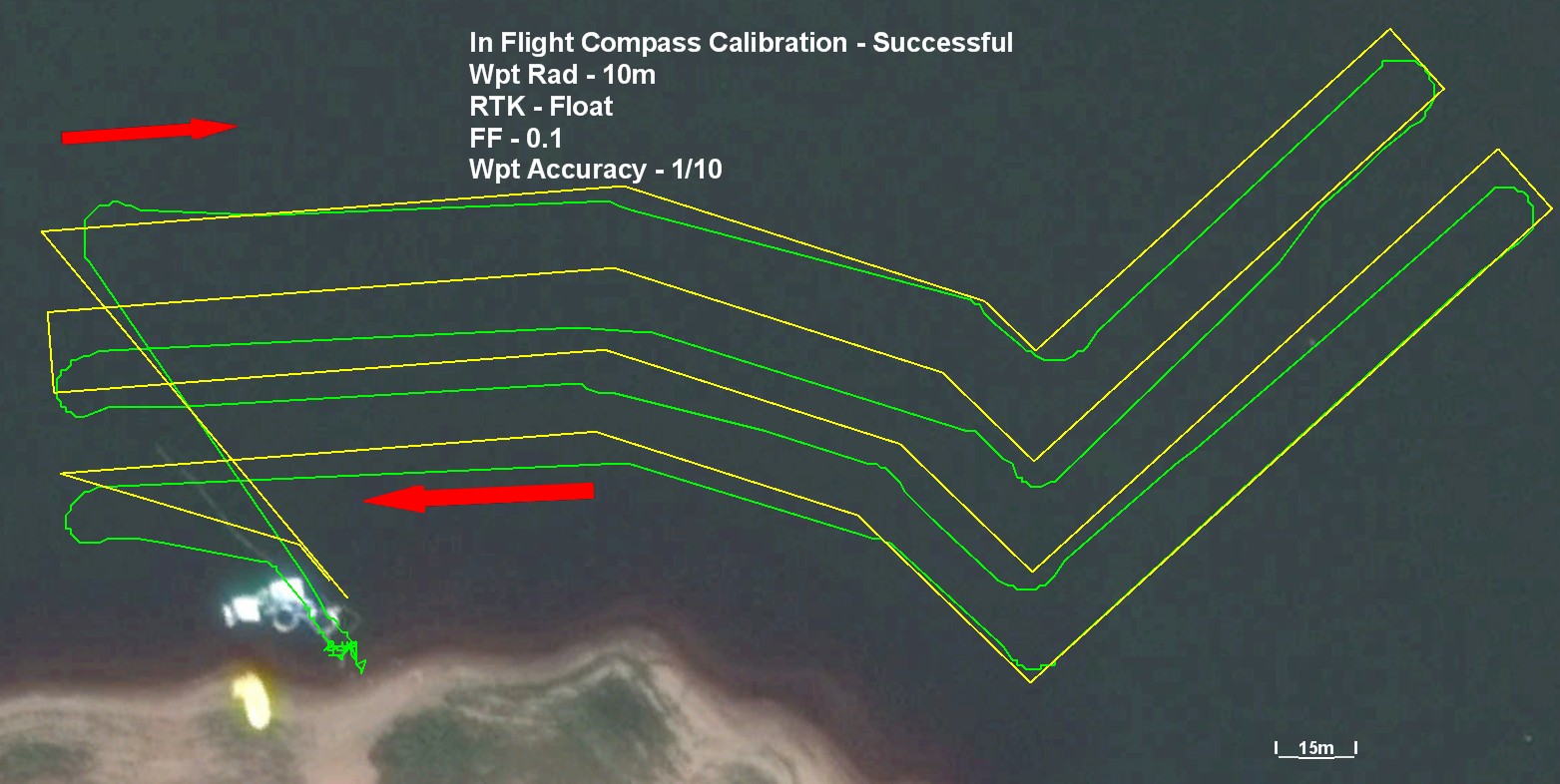
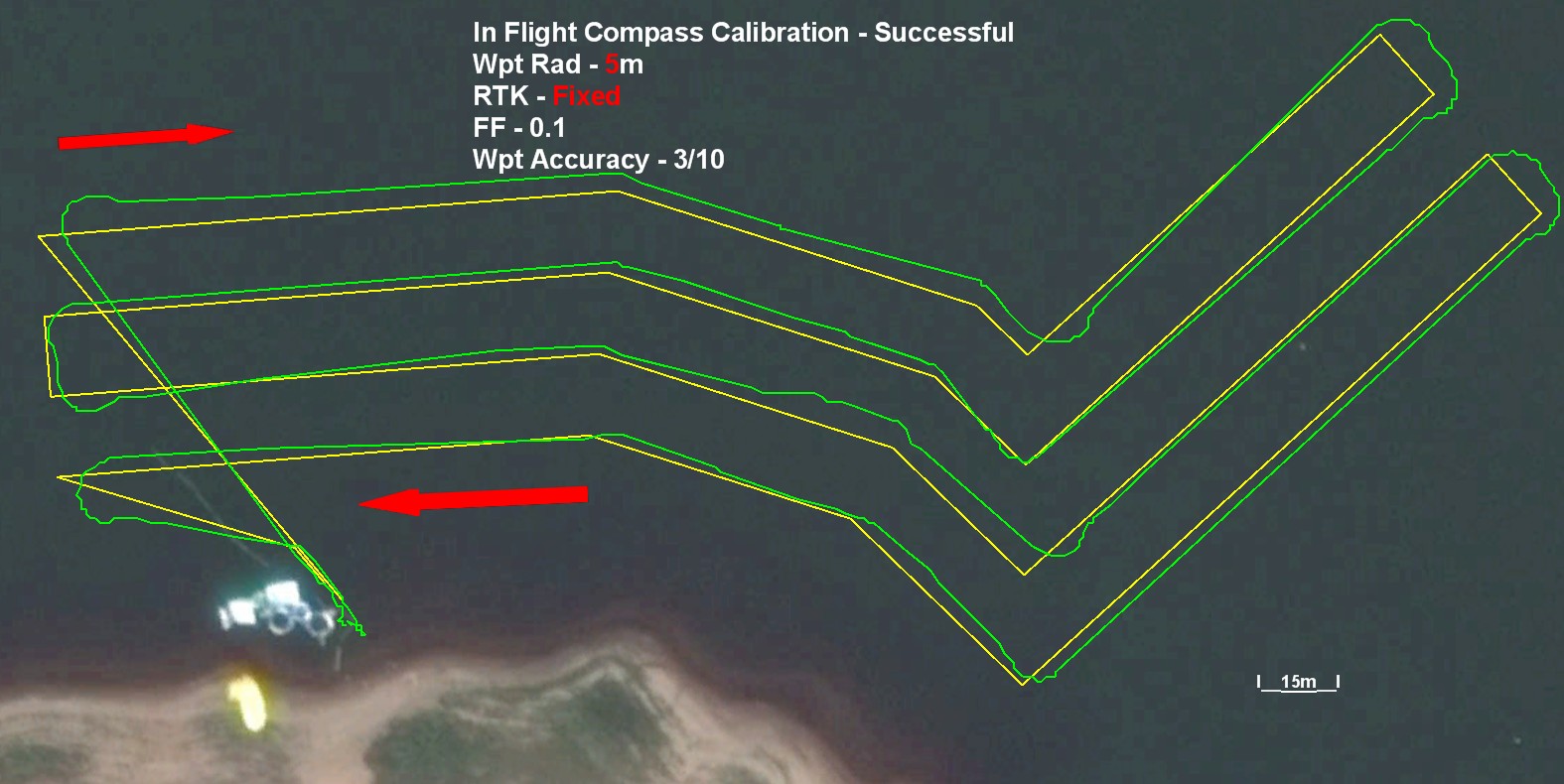
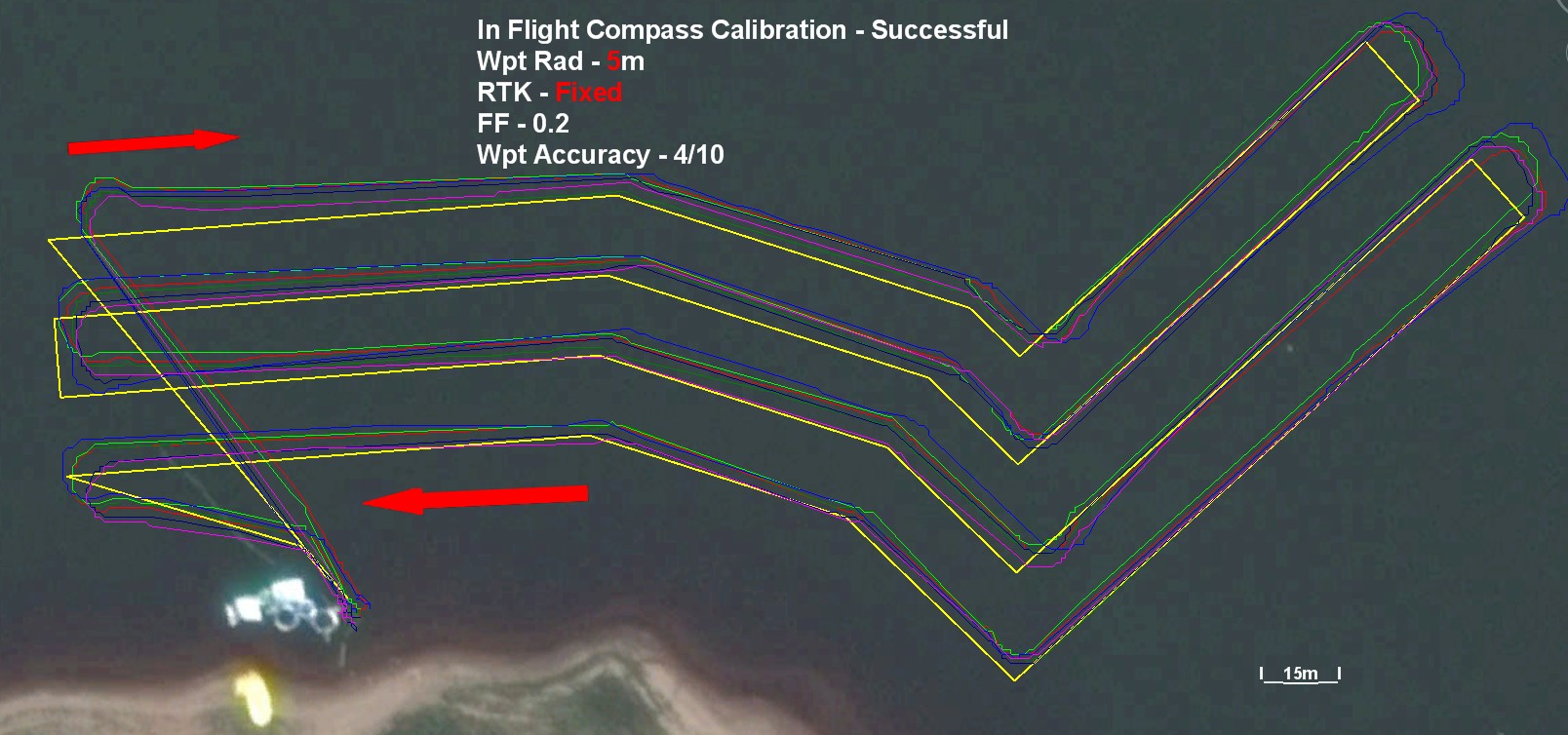
Yesterday I did some HERE+RTK testing on the water and got the following results.
I will return another day and do the exact course (Flight plan in yellow) with the old Here and the Here2 GPS only and compare.
For now, here are the results of the HERE+RTK