Yes I wouldn’t be surprised if you get good performance with an M8P up in the air without many obstructions.
All of us building these kinds of robots are wonderfully fortunate that Tomoji Takasu decided to open source an RTK library years ago. The companies that picked up his work put pressure on u-blox to roll their own RTK product, and u-blox working on RTK is very appealing thought.
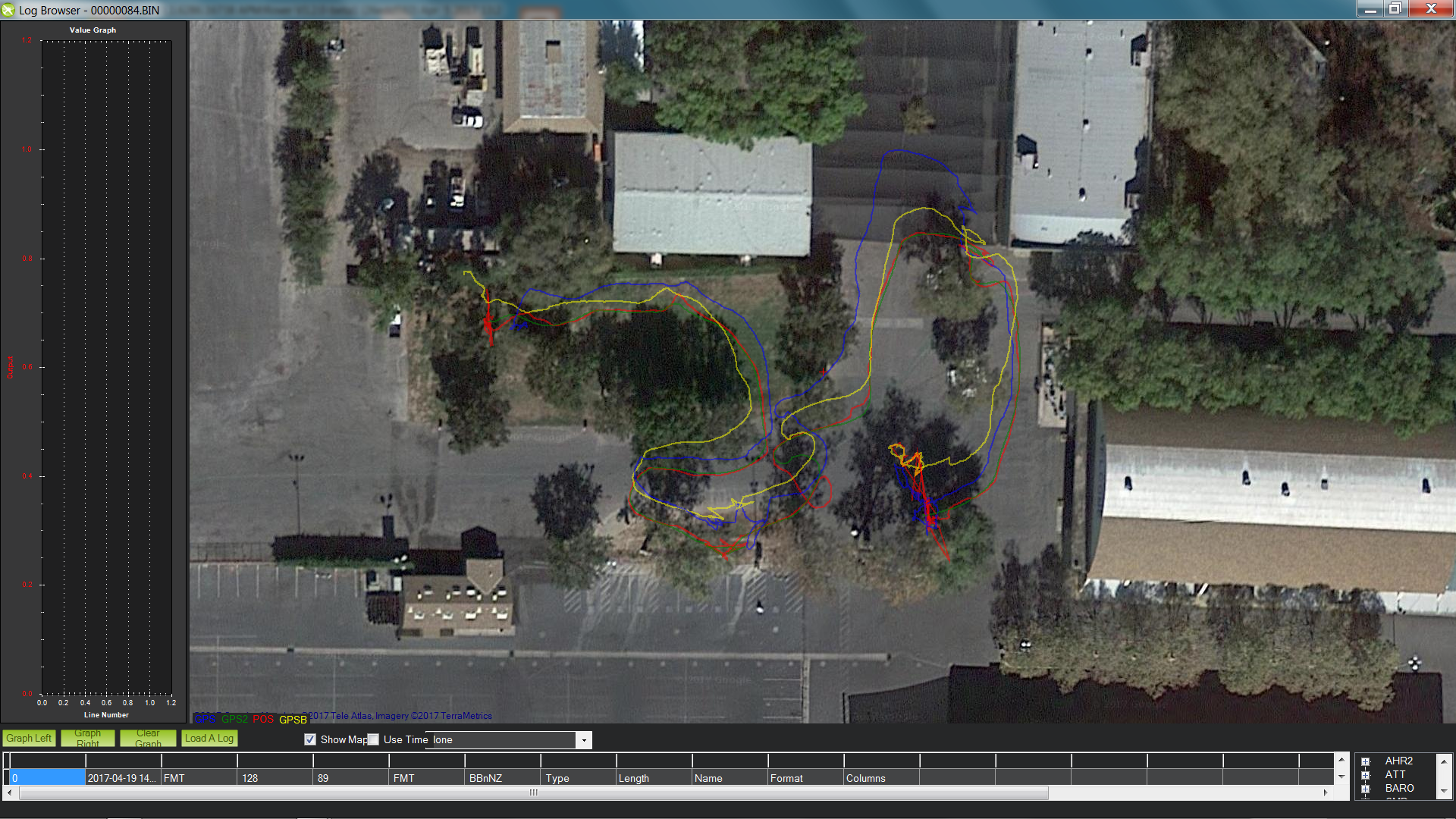
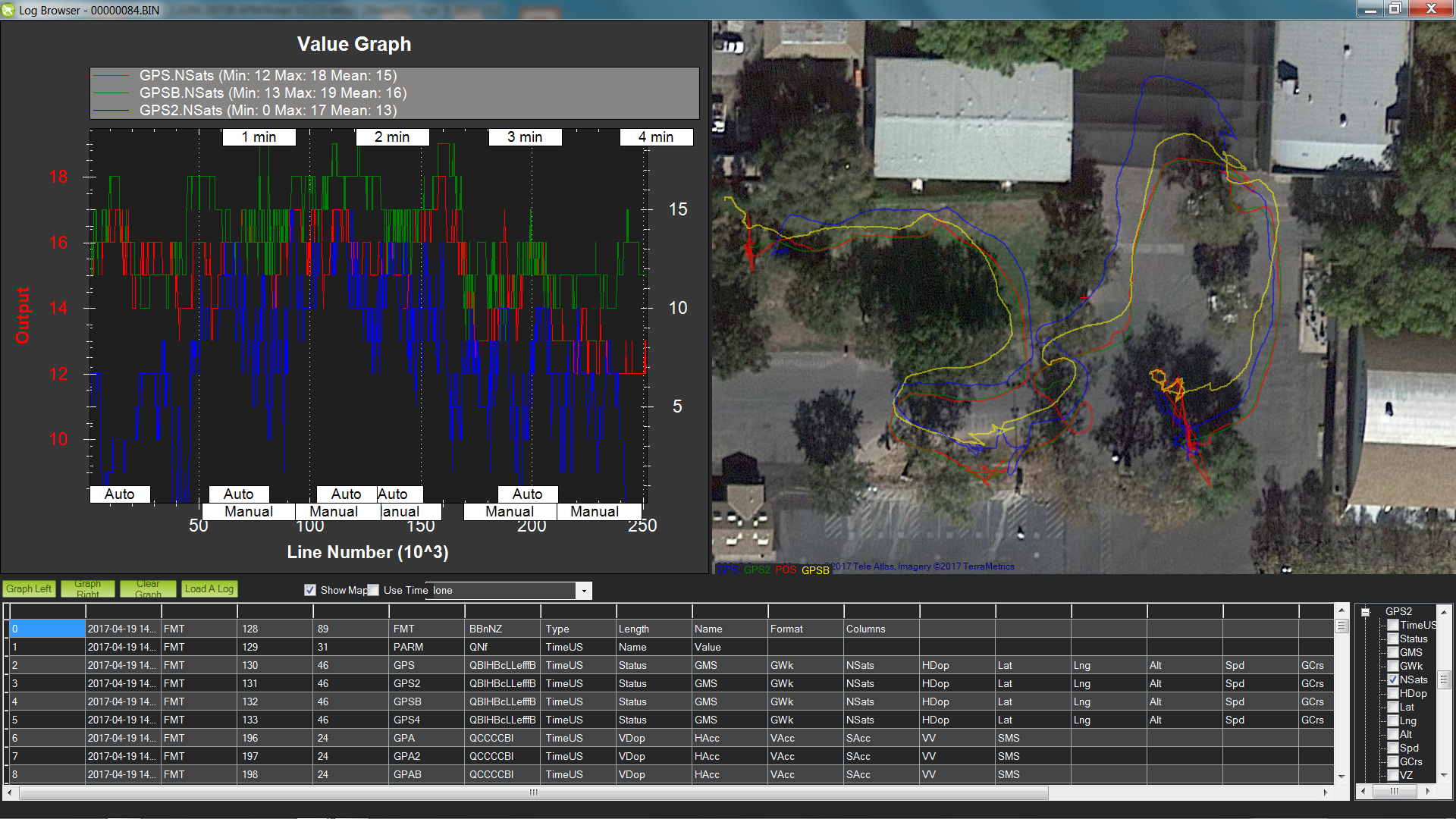
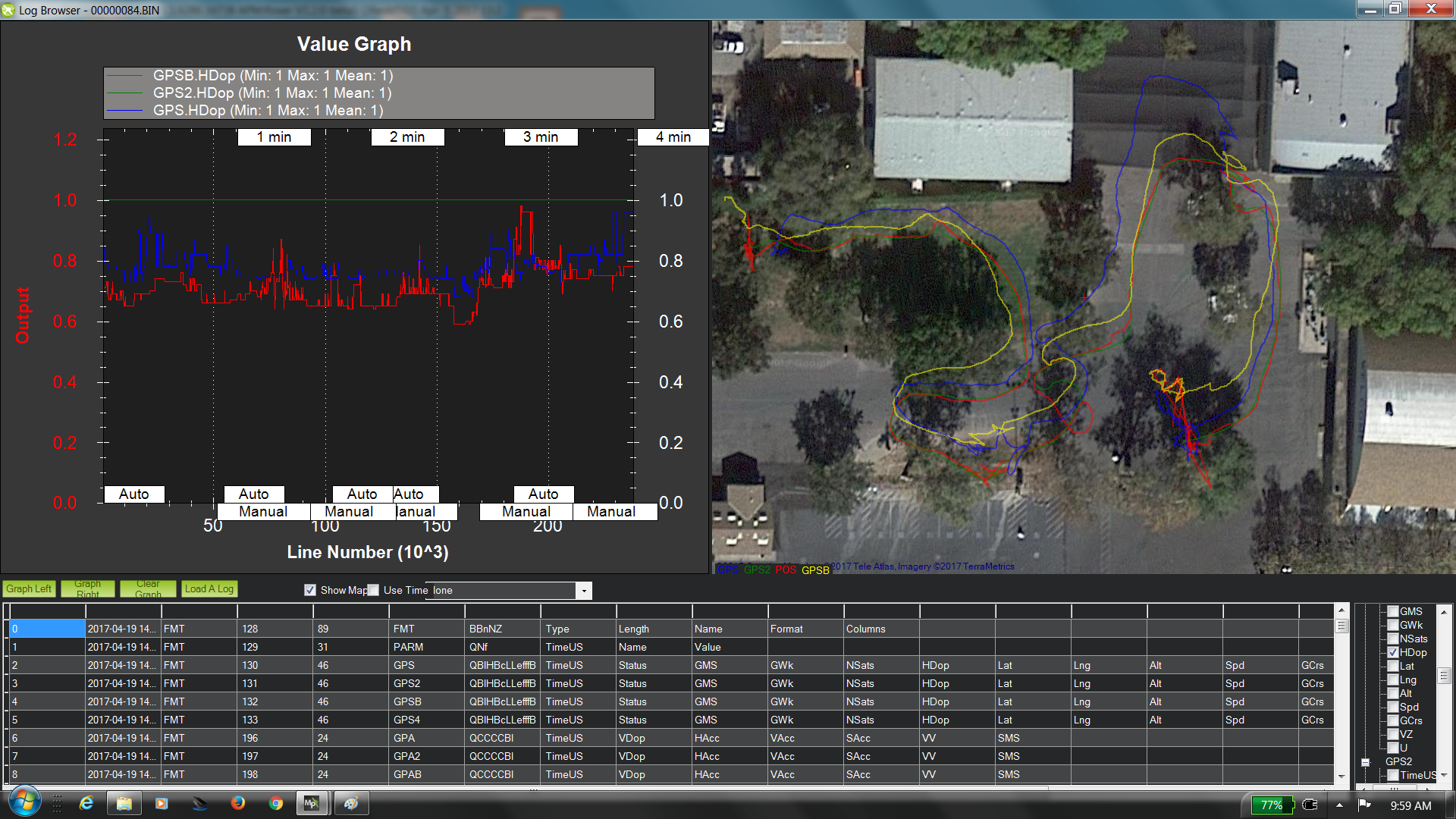
Here’s something I often think about: Lidar is an amazing technology that several companies are presently racing to solve both for performance, reliability (solid state) and cost of production. RTK GNSS, on the other hand, is effectively a solved technology (via L1/L2 Multi-Constellations systems). When I say “solved”, check out the pictures of my back-yard 60mx30m robot testing grounds this morning:




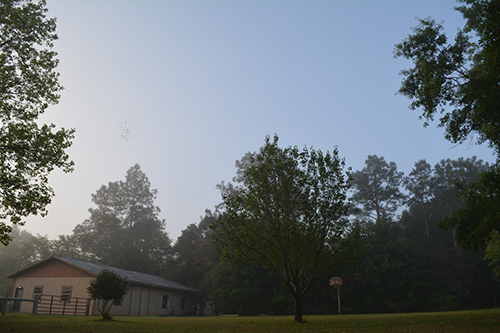

So, I don’t know how much perspective those pictures give you, but there are trees everywhere.
I run missions with the ComNav k501g day after day, and rarely lose an RTK lock. Have you ever seen an actual RTK user post that kind of claim about an L1 RTK system? Let me push a little more: if any L1 manufacturer reading this would like to compete with the k501g in the environment pictured above, just ship me your product and I’ll be happy to post the results.
If you read forums of guys using L1 RTK, you may pick up on a lot of angst. If you read forums from precision ag farmers and surveyors, they can’t stop raving about L1/L2 RTK. They act like it’s some kind of miracle. After working with the ComNav, I’m with the farmers.
So, RTK is effectively solved, but did you ever see an article pointing that out to the beginner?
You mentioned Mission Planner’s RTK inject – I’ve used it too and it’s a wonderful feature. Michael Oborne, in addition to writing the outstanding Mission Planner, wrote the Novatel/ComNav driver – it works great.
Hey, we should all rejoice – those of us using these technologies are reaping the rewards of amazing companies and amazing teams like the Ardupilot developers.