Hi there
Running Pixhawk 2 (v3.5r6) and latest mission planner 1.48.
Just got the HERE+RTK set and thought I would do a highly scientific quick static test outside in non-ideal setting. Actually I’ve been using Reach (limited success) and have got a Septentrio AsteRx-m2 to demo.
I know we’re not talking apples vs apples here (Reach L1 and Here+ L1 can be apples and Septentrio L1/L2 is a banana)
Simple demo:
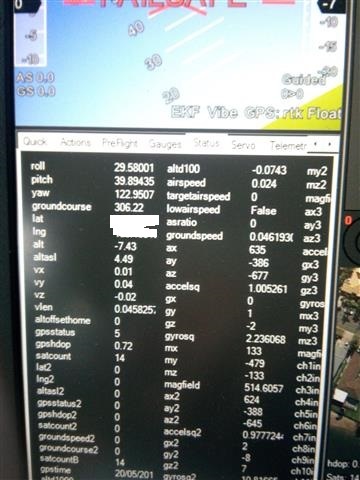
- Here+ Rover GPS connected to Pixhawk 2 connected to mission planner with RTK corrections from NTRIP server via MP
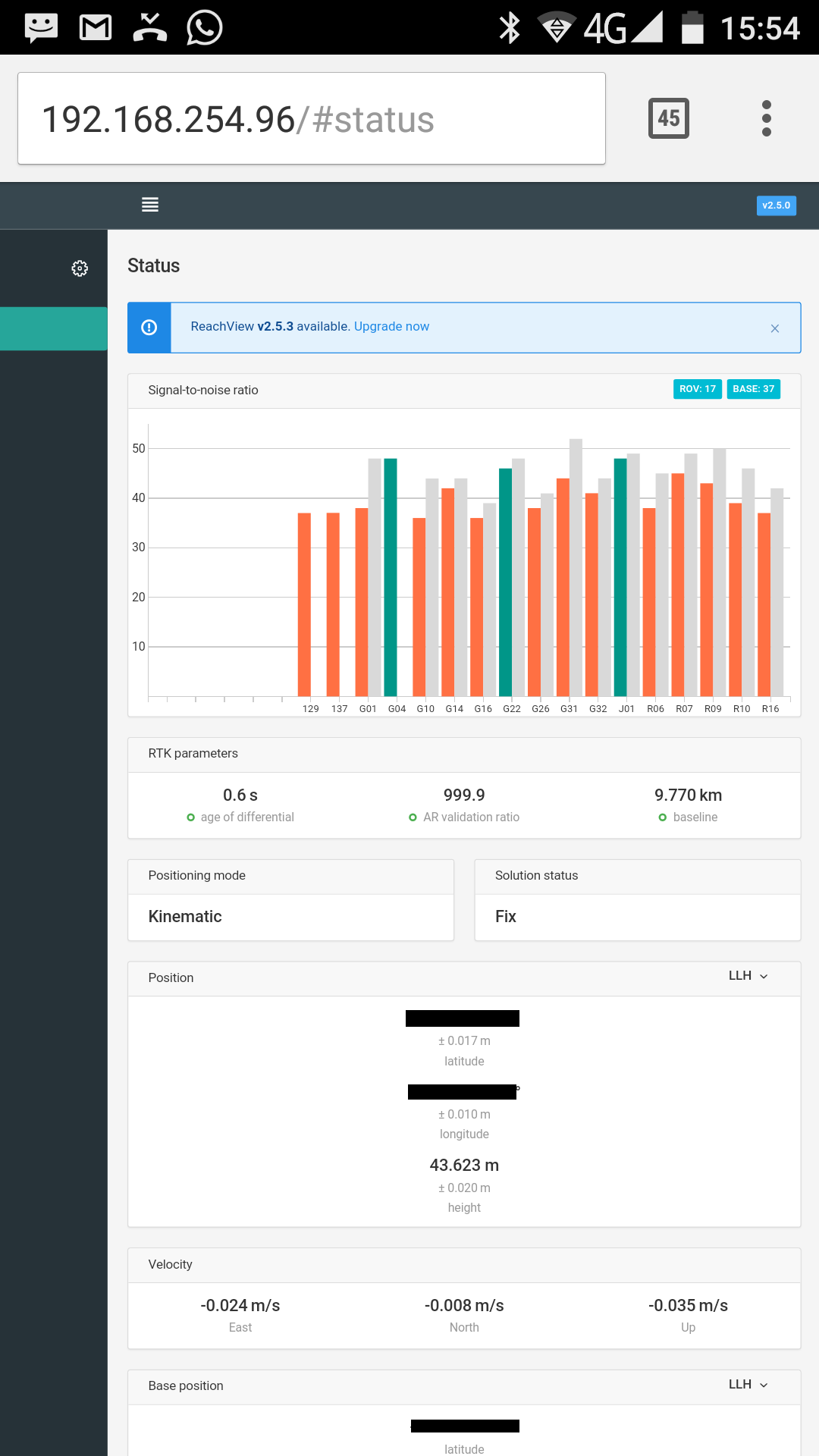
- Reach RTK unit on it’s own connected to wifi and same ntrip server
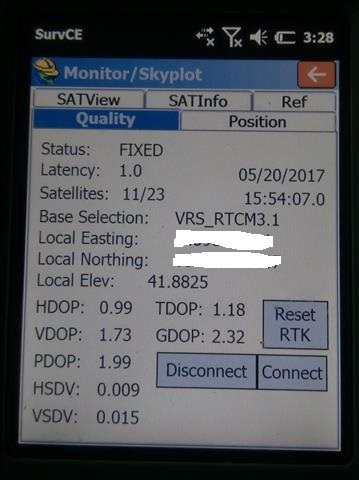
- Septentrio standalone unit connected to VRS/NTRIP via GPRS modem
Snapshot results
Here+ stayed RTK Float … with position and altitude drift of a few metres - 1 hour operation
Reach unit actually got and held a FIX (AR 999) - got fix after 10 mins
Septentrio got fix less than a 1 minute
Some snapshots attached. To be fair, I restarted the Reach unit and it never got a fix again. Same as Here+. Although I noticed up to 3m altitude drift from Here+ in RTK float. Also understand that a ground plane will help performance.
Not quite sure what I was expecting but I guess I need to see if there is anything that can be tweaked in the HERE+ to improve ability to get a fix.
I’m a little clueless here, but it strikes me odd that the base station of Here+ and mission planner do not allow NTRIP corrections to the base in order to create a more accurate Survey In location? Perhaps I’m missing something??
I would be happy for relative positioning (i.e. rover in relation to base … don’t need exact coords) as long as it’s constant and accurate.
Might need to try in a better ‘sky view’ environment. BUT, I’m blown away how quickly the L1/L2 system locked in. But there is 8-10x price difference!
Reach does well sometimes, but seems to be a hit and miss scenario. Once you get a FIX … I tip toe around and tell everyone to keep quiet … just incase. Interesting to see that the altitude differenc between a FIX in REACH and a FIX in SEPTENTRIO is about 1.5m! I think I know which GPS altitude is correct 
Do the survey in coordinates need to be accurate at all if I’m only interested in relative positioning?
Appreciate any words of advice/wisdom. Whats everyone elses experience with HERE+


Cheers
Jason