I think it would be perfect for a 450. It is small and fits just about anywhere that’s suitable to mount a controller. It also has no problems with rotation to lateral vibration coupling that can affect the cube type controllers because of their IMU location, especially if they are mounted on a mount that is too soft. The controller has to be able to sense what the frame is doing or it won’t work right. If you isolate it too much and start hanging weights on it to damp vibes the helicopter flies like a pig. BTDT, it don’t work.
Since we’re showing off our good vibrations:
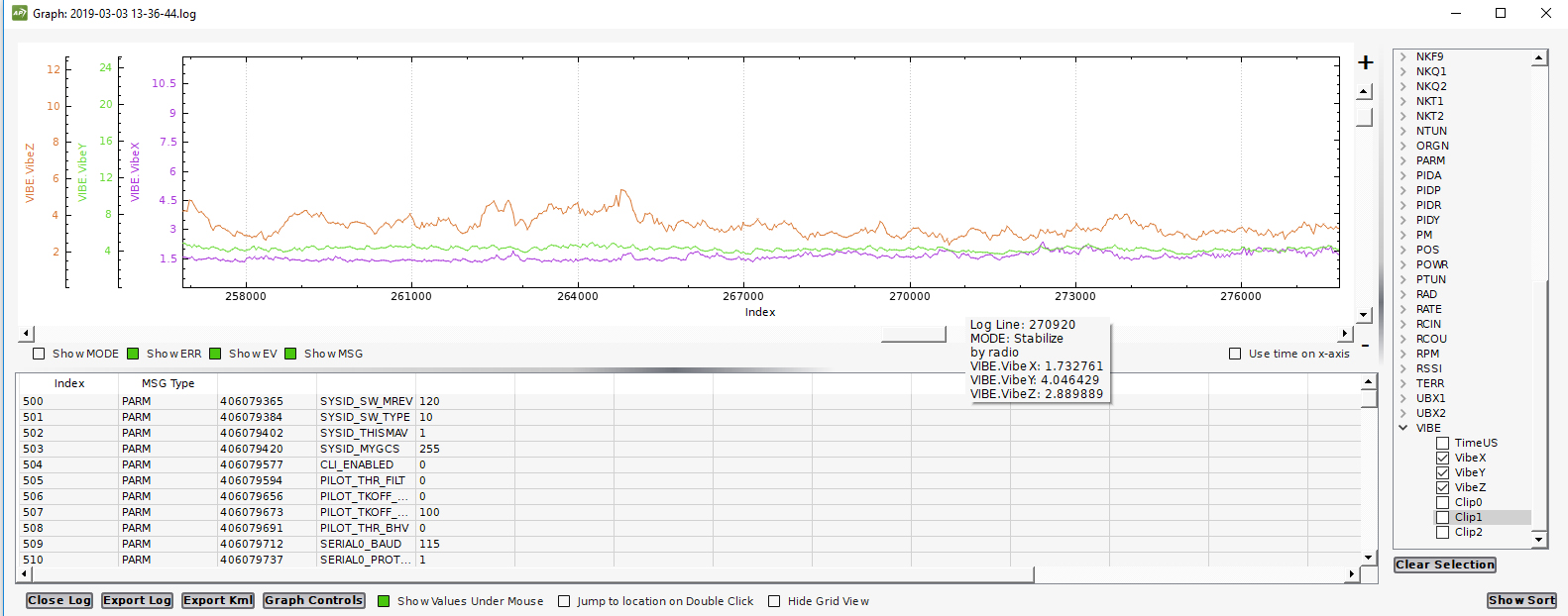
The Soxos 600 has dampers on the tail assembly and tail boom mount which really helps.
Chris, yes I lost about 3 min flying time with that massive Alum-block. Vibration-wise it is working.
Now I am thinking! Could I gain that time back with a pixhack v3x?
I might order one.

Look at the block between the red lines in the photo.
A smaller block did not reduce the vibrations enough. But you are right it fly’s like a pig now.
You have to be careful of wiring too. Sometimes the wiring can transmit vibration to it, especially when the wires are hooked to the face of the board and the wire looms are stiff. Can’t tell from the photo but if that GPS cable sheath is touching the Cube I would be suspect of that.
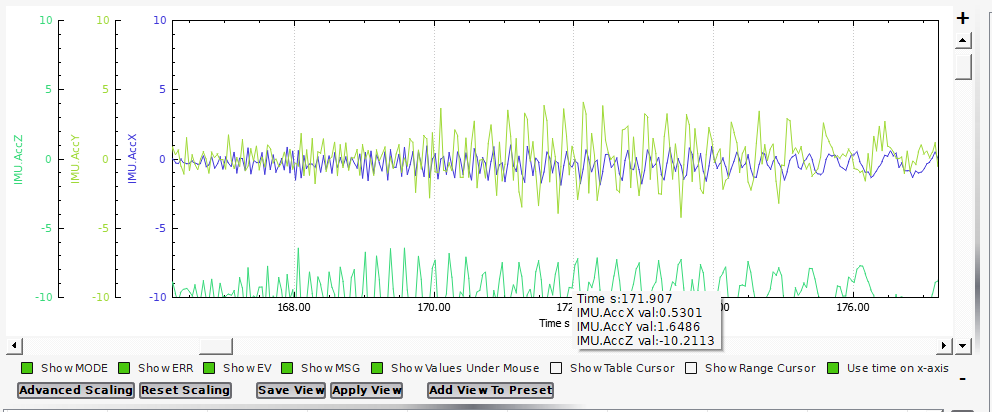
That is a huge block of aluminum there. With the IMU location in the cube style controllers I can see why it probably don’t fly all that good. CUAV makes the V5 that is sort of like the Cube, but after running both the V5 and the V3, IMO the V3 is a better helicopter controller. During ground run with piston machines, which can be quite long period in cold weather to warm up, sometimes up to two minutes with the rotors turning, the vibration can reach quite high levels. They are not quite as “push button” switch it on and go as electric. If the IMU acceleration reaches 16G then they will clip. But even during ground run the V3 handles it with no problem
If the helicopter goes into ground resonance, which sometimes happens, hopefully you’re at full rotor speed and can punch it get out of there. But sometimes it’s not, especially taking off from frozen ground and it starts reacting against the landing gear. If that happens, the only choice is to cut the power. With electrics you wont’ normally see these issues. But once you go to pistons then it’s more like the real thing and all the “conventional wisdom” on how to mount the controller and damp the things goes right out the window. That mount you have would not last 1 hour in a piston machine. It would destroy the controller, shake the connectors loose off the board, and it would be dead. BTDT too, unfortunately. The closer you can get the IMU’s to the source of the vibration, the better it is.
The block is glued with a thin double sided foam ( industrial strength) to the frame. There is no touching of cables to the cube. Can’t s see that on this photo.
Just hesitating to order because there is no cabling with the pixhack v3.
If I order it as a Set there is a GPS unit and a Power-supply unit plus others what I don,t need… I would prefer if I just could plug the cables in from my present setup and go. But that seams to be not possible. Not desperate at the moment.
All the peripherals you have now works, but different plugs. Your mount obviously works for your particular application. With the piston machines where the vibration is different frequency and have to prevent coupling of the mount or controller with roll and lateral acceleration it requires a completely different approach.
1 Like
Chris,
I installed last night a brand new very nice Pixhack v3x onto my TR600. The kit came with a GPS and cables.
Everything worked except the old 3DR radio I am still using ( build 2012 but latest FW), never let me down even on different RC aircraft.
Checking and measuring all the wiring I found out that the Radio interface at my Pixhack v3 is supplying 3Volt only. That should not be I believe.
After fiddling with a new wire and supply the 5V required externally the radio started working again flawlessly.
What a nice little FC. Have not flown yet.
No, I think it should be 5V, but I’ve never actually measured it. All my V3 controllers came with a little WiFi radio that I plug into the telemetry 1 port and those work off it. I use that for making settings and uploading a flight plan. They seem to be much faster than telemetry modem radios. Then I have C & T telemetry cable on them on Serial 4 to get MavLink telemetry into the RC, But I am using 900MHz RC, not 2.4GHz. Then on the Serial 2 I have 440 ham band telemetry radios for long-range connection to the GCS. Those radios have external power supply, as they will not power off the telemetry port.
Fred, I like the form factor of the V3 controller with all the end connections and no wires sprouting out of the face of the controller.
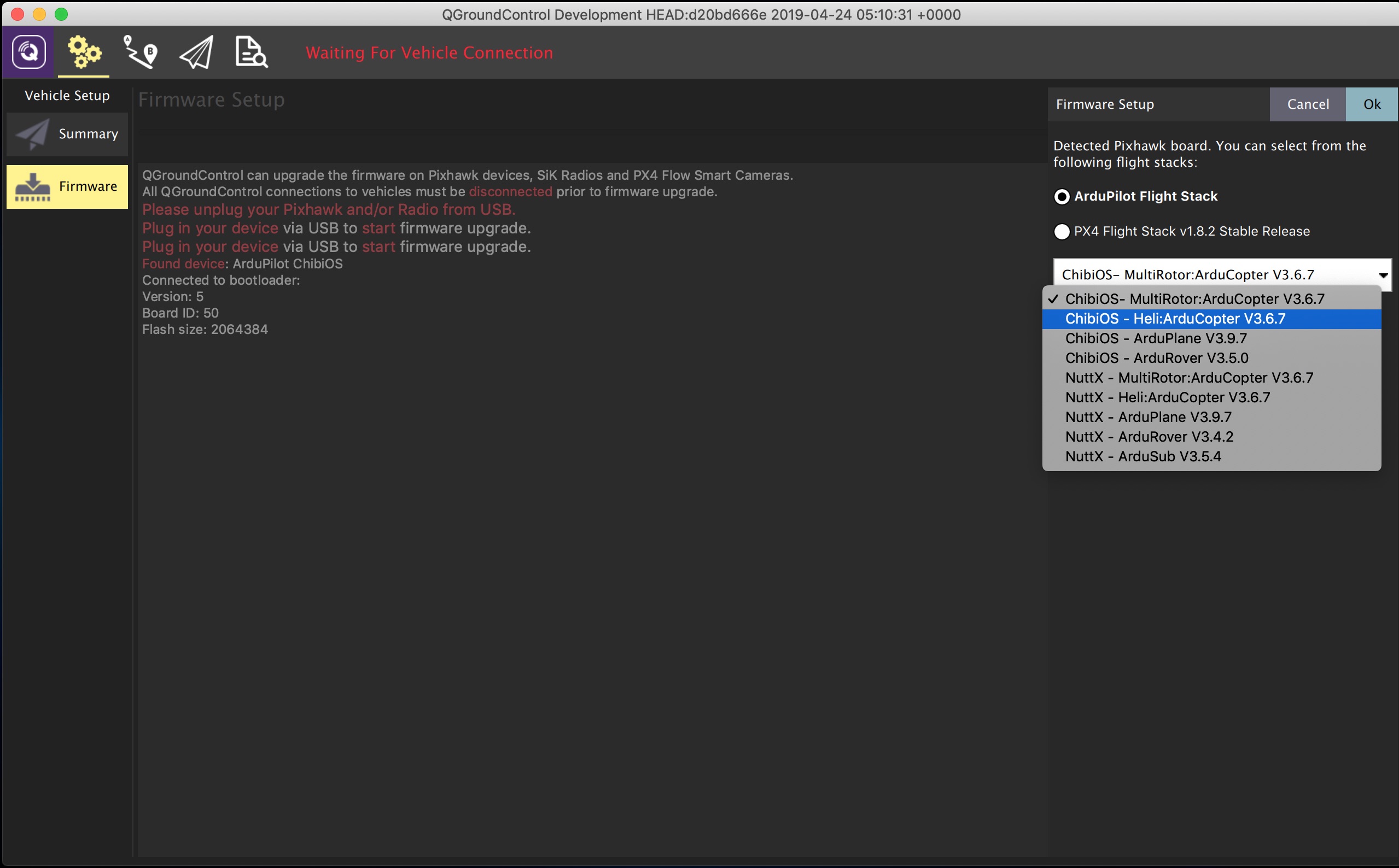
Make sure you got the right firmware in it. They come with PX4 pre-loaded using NuttX and I’ve had the GCS identify them as fmuv2 instead of fmuv3 on ChibiOS until I updated the bootloader.
Chris, Could you share the instructions about updating the bootloader on V3 controller?Where do I go to get the correct firmware for V3 controller? Thanks
That is quite easy.
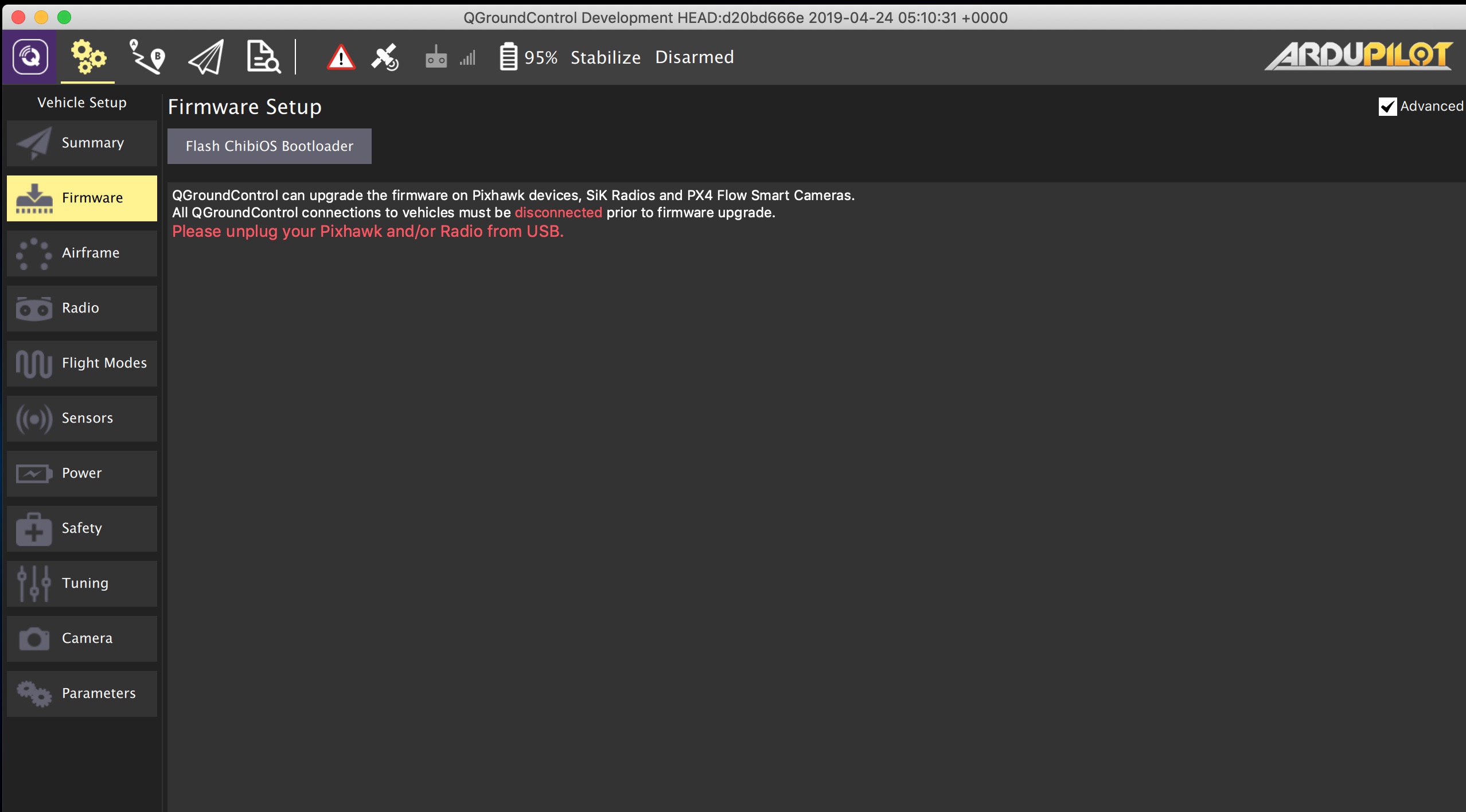
Connect your board to QGC with the USB cable and choose the latest release version
after this (the board reboots) go back to the same screen and tick the advanced check box at the top
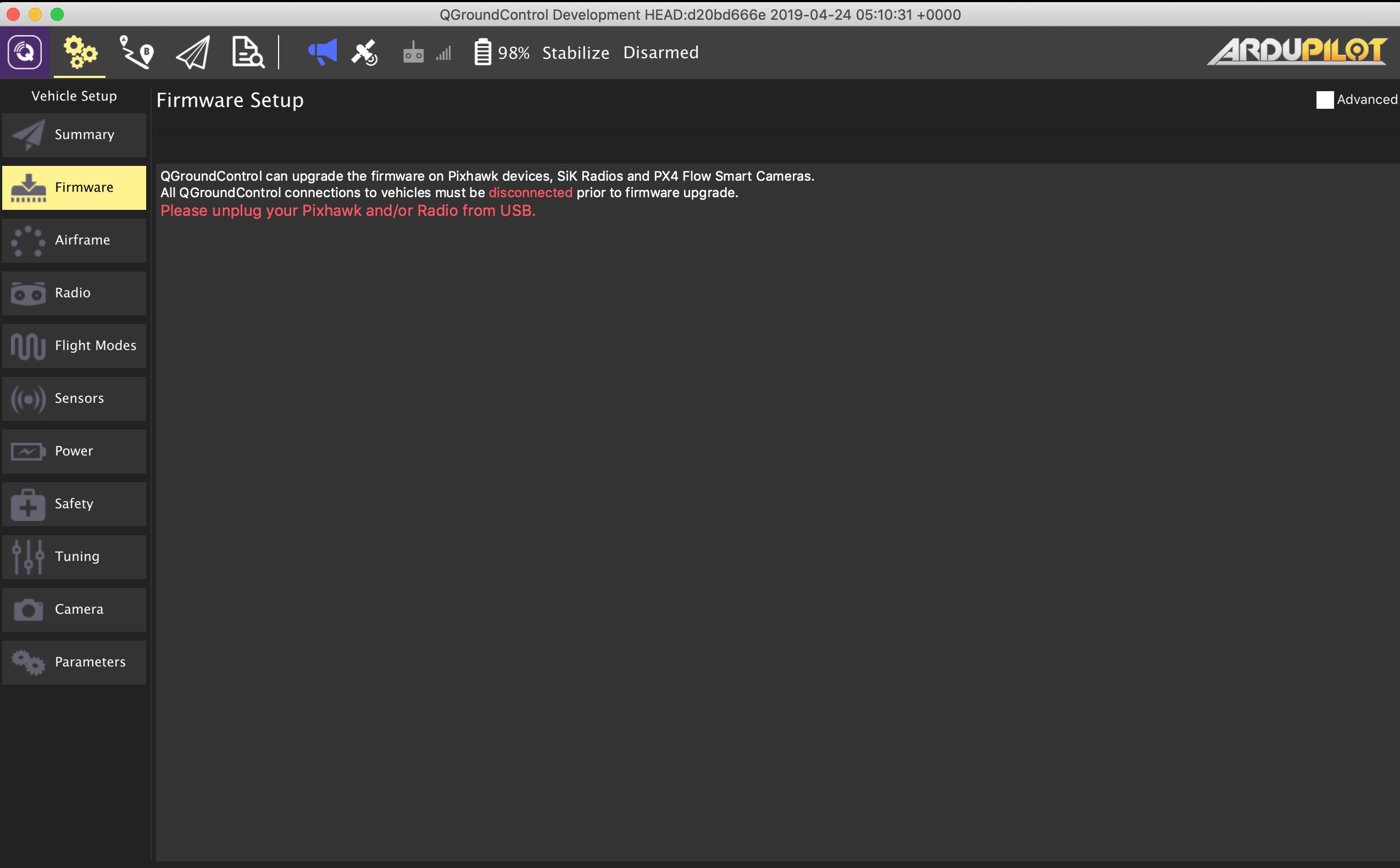
after the box is selected you can see a Flash Chibios bootloader button. Press it and done…
If you really, really want to be sure, then download the firmware file from ArduPilot firmware : /Copter/stable/fmuv3-heli
and flash it manually
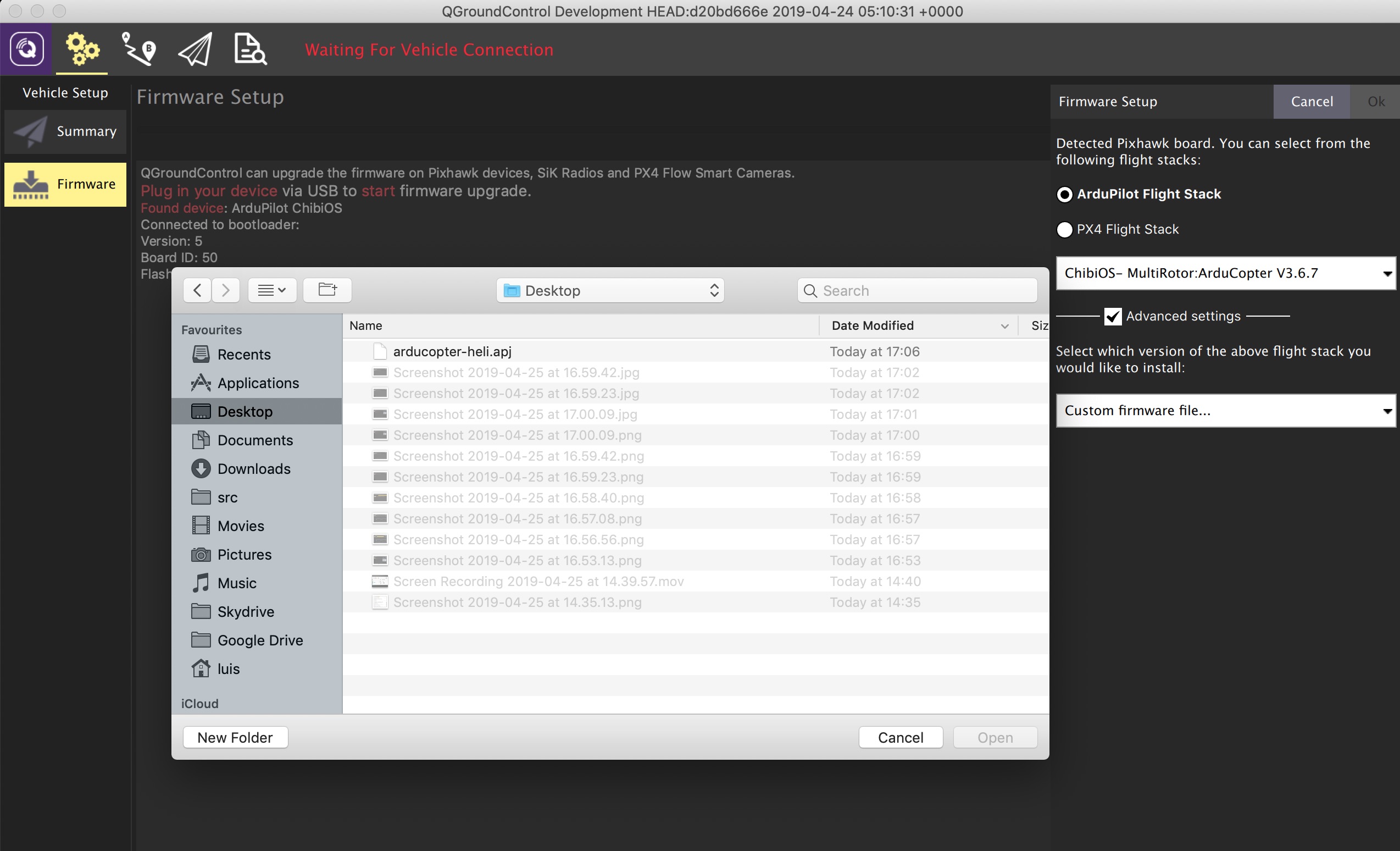
then proceed to update the bootloader as above.
And done (again) ![]()
1 Like
Thanks, just updated the bootloader too.
Hello David. I too am working with a 450 sized heli…but I’m months behind you in knowledge.
Could you be so kind as to post a few photos (especially close ups) on exactly how you’ve mounted your flight controller in the 450?
Did you go ahead with the Pixhack V3? Your thoughts on it? Thanks in advance.
Here you go. I remove the plastic case and place the entire Pixhawk 2.1 board on the aluminum carrier and place it inside the frame. Keep it in mind that Pixkawk 2.1 is not made for 450 size heli.
![]() IMG_20190723_195931.jpg
IMG_20190723_195931.jpg
David. Thank you! Great photos.
Just amazed at how you were able to squeeze that board in there. As mentioned…you are months (if not years) ahead of me. Perhaps you can suggest a better thread (or I could start one) on what are the 2019 top pics for flight controllers for the TRADITIONAL 450 size heli? I’ve got my eye on the CUAV V5 nano:
http://en.cuav.net/article/MjAwMjE2MjE2MjA4MTkyWkRJWQ==
Also, if possible, could you PM me over at Helifreak.com. User: onepiece
Had a few more 450 questions that would bore the forum readers. Don’t think PMs are available on this site. Thank you again and all the best.
Mike, Please create new topic/post new question related to the traditional 450 size heli in this forum. I don’t think pixhawk flight controller for 450 size heli is used by many people but Chris Olson and other experts in this forum can provide some guidances on this as well. I got all questions related to pixhawk for 450 size hei answered here in this forum
Hello Chris - I too am in the market for a “frustration free” controller for a 450 sized traditional electric heli (flybar-ed). Is Pixhack V3x still your recommendation as the go-to unit? I’m overwhelmed with choices and don’t have the experience to make an informed decision. Any thoughts on Pixhawk 4 MIni or the new CUAV V5 nano? I like the smaller size and lighter weight of those for my small heli…but based on your words in this forum…the V3x is still the best bet overall? Thanks for your thoughts. Mike
Hi Mike,
I know Chris has been tied up with some other stuff lately. But I think he and I agree that the CUAV V3x are great units to use for your application. I have one and the larger V5 and love both of them. I have not used the CUAV V5 nano nor have I used the Pixhawk 4 mini. Not sure that Chris has used them either. Hope this helps.
Thank you for sharing your valuable knowledge, Bill. Very helpful. Due to 450 size constraints, I’d have to mount on the side frame as Chris did in this video demo’ing the V5:
Did you buy your V3x from Ali Express or the CUAV web site or? Which LIGHTWEIGHT (and frustration free) external GPS unit would you recommend to pair with the V3x? Sorry for the volume of questions…I’m VERY new to this and have a limited budget. Want to get it as close to ‘right’ as I can with the fewest missteps and crashes.
PS - Will create a new thread for future questions on this topic as I seem to be meandering off the original topic. All the best & thanks again.
Just buy from AliExpress. You’ll still deal directly with CUAV.
GPS: I’m a big fan of the mRO GPS units, but the new GPS units also work well. Just be aware that none of them seem to line up the compass orientation, so you always need to make sure that you have the correct orientation set.
Neither of these units are cheap, but work extremely well. You will , in most circumstances have to redo the cable(s).