Agree with Jakob.
I changed on my TR600 from the Pixhawk 2.1 (cube) with a HERE GPS quipped to a new CUAV Pixhack V3 with the CUAV GPS ( works very well) and I am surprised that my problems with vibrations are totally gone. No more Tb!
And I saved weight because the Pixhawk 2.1 needed a solid Aluminum block underneath.
The purchase from AliExpress was no problem.
Thank you Fred, Jakob, Bill and all. LOTS to get my head around. Hope I can return the favor soon.
I’ll report in a few days about the v5nano that I’ll be using on one of my helis. Its size is “almost” perfect for a 450 Pro style heli…
Thank you for this update Luis. I know you’ll do well! Looking forward to your updates.
MikeM
Hi Chris Olson/ anyone,
I am setting up a 800 gasser with cube, heli is tuned from the default tuning procedure. Alt hold is working properly.but when I put it in loiter it starts moving in roll and pitch i.e. toilet bowl effect. After tuning PSC gains it is somewhat stable but not perfect.
I have checked logs but it is showing position still drifts, only after few seconds it maintains position.
My PSC gains are:
PSC_POS_P - 0.5
PSC_VXY_P- 0.8
PSC_VXY_I-0.2
And here is my parameter file attached
Thanks
Rish
Rish,
Your link to the Param file came up as the log file. Please post your param file so I can look at your setup. I will look at your log file later tonight when I get home.
Regards,
Bill
Hi Bill,
Sorry I was outside , away from my laptop. Tomorrow I will share my parameters. But I m sure u can check my parameter from binary file which I have shared.
Regards
Rish
Hi Rish,
So I looked at your parameters and your log file. In order for the loiter or any of the assisted modes including auto mode to work properly, you have to have your actual pitch and roll attitude following your desired attitude. Here is what you data looks like
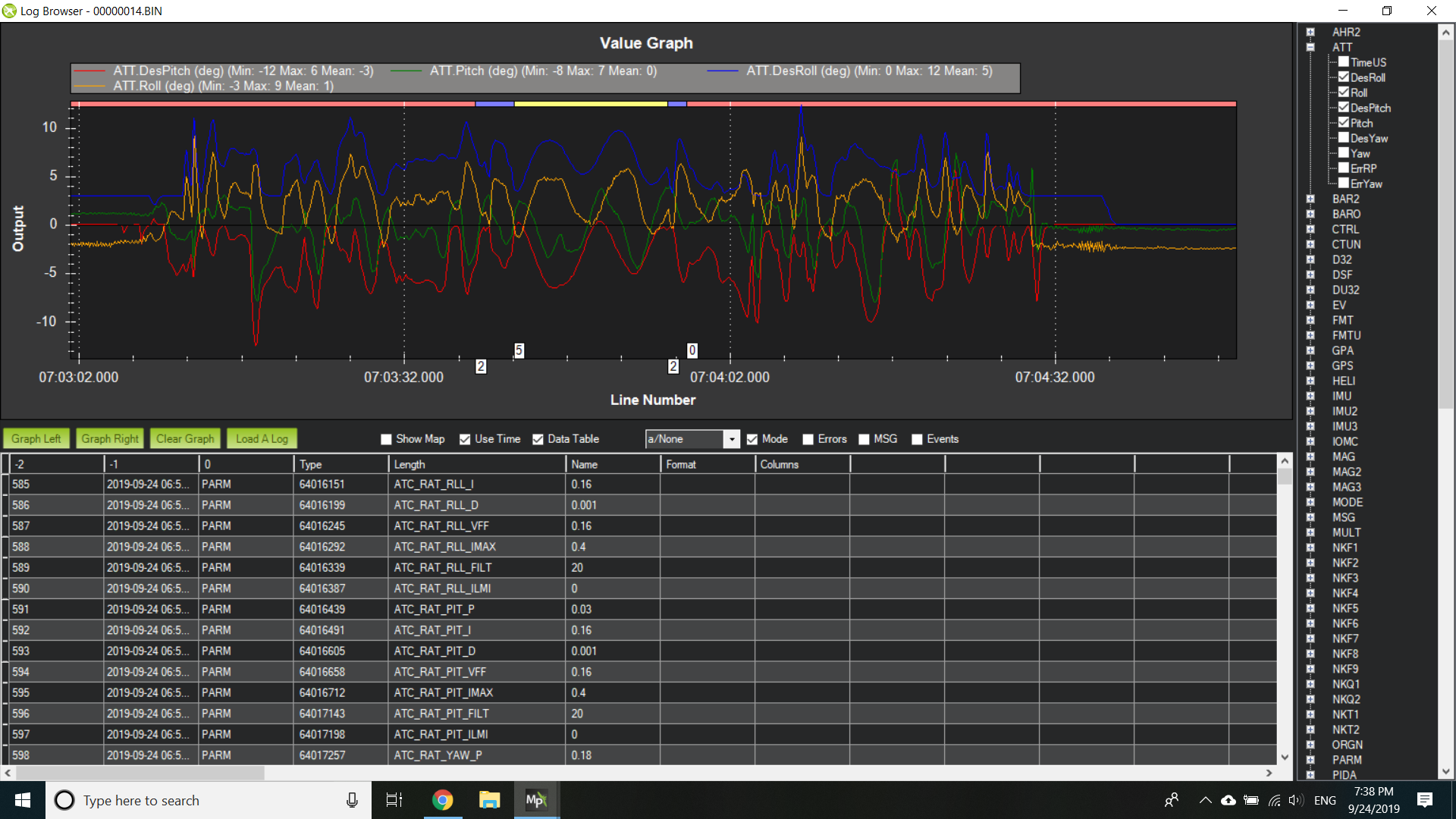
This is caused by the ILMI parameter for pitch and roll being set to zero. I recommend this being set to 0.08 for both pitch and roll. Fix that issue and then we can see how well your aircraft is holding the desired attitudes. Also please set your LOG_BITMASK to 131071 or at a minimum select fast attitude logging.
Hi Bill,
Thanx,Today I will set this parameter and test fly heli.One more thing ,Is it ok to change PSC gains from the default setting like mine is?
You can change them but we should gets the helicopter tuned properly to follow the desired attitude before we change the PSC parameters.
Hi Bill,
With my ILMI Set to 0.1 Max
Loiter is working but if I Move heli and leave stick then same TBE Problem comes ?
Is it related to ATC_INPUT_TC set to 0.15?
Regards,
Rish
It is 0.2 …
In my case
Hi Rish,
No, the TBE is not related to the ATC_INPUT_TC. Your setting is perfectly fine. In fact I prefer mine to be between 0.2 and 0.25. I will look at your log tonight to see how well the actual attitudes are tracking the desired. It should be much better now that you have the ILMI.
I will say that I am not an expert in tuning the loiter mode. I am still learning. there has been other users that say that PSC_VELXY_D gain has to be set to zero for heli’s. I have not done any actual flight testing of this but I have done some work in the sim and adding a little PSC_VELXY_D has helped tremendously with better position keeping in loiter. So if you care to experiment with this parameter, feel free. I would increase it in small increments, maybe 0.05. Be prepared to switch back to stabilize mode if the aircraft starts to oscillate excessively. I would only use enough to remove the TBE.
Rish,
I looked at your log file and your actual attitudes are following your desired attitudes much better. There is some lag and you could probably improve the tune of the attitude controller but you may just want to see how loiter works with what you have. I know you tried already but I have new information on how to tune loiter better. Like I said in my previous post, many users have been swayed away from using PSC_VELXY_D and leaving it at zero. In fact that made it into our default parameters. I have been tuning my heli and looked at my values for the PSC parameters and here are the values I am using
PSC_VELXY_D,0.5
PSC_VELXY_D_FILT,5
PSC_VELXY_FILT,5
PSC_VELXY_I,1
PSC_VELXY_IMAX,1000
PSC_VELXY_P,2
My heli has no problems with these values and does a good job holding position in loiter.