Good point. Will do. Thanks Chris.
I replaced the entire old head assembly with new TREX, calibrated the setup. Here is the link to the video of the new head assembly setup(in loiter mode) for your review and comment. Is it auto airworthiness?
Well, it looks like it’s hovering a lot more accurate than it was. If you are satisfied with it’s position-holding and handling otherwise then try it in Auto. As always, be ready to take over manual control if it goes awry.
I noticed the heli jerks back when switching to loiter from stabilize mode. Is it required order to have it in alt hold mode prior to transitioning to loiter always? I always start it in stabilize.
No, it is not required to use alt hold first. I guess mine sort of “jerk” a bit when entering Loiter too. However, as of 3.6, I no longer use Loiter in my own heli’s. Loiter underwent significant changes in 3.6 and I have found Pos Hold to be more suitable for my requirements and much smoother on pilot control and braking.
David, What do you mean by this? Can you provide a video of it? I am working on the transitions and behaviors and I would like to understand this issue.
thanks,
Bill
Bill,
I have log from it from 3.5 with the Raptor 716 when I used Loiter yet. AFAIK it has always done this. You can see the sudden jerk in desired roll and pitch when it switches from stable hover in Stabilize to Loiter
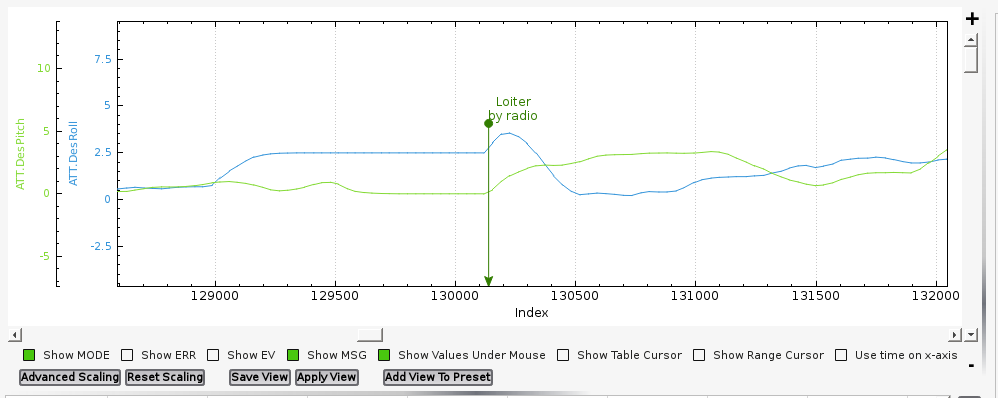
This may be from a slight amount of drift in position when hovering in Stabilize. So when you switch to Loiter the Loiter braking kicks in. I’m not sure. The log snapshot from above showed .5 m/s GPS speed when I switched it. But it still showed 0.5 m/s after I switched it, so not sure that was the case.
Switching to Pos Hold is much smoother with no jerking. Even if it’s drifting a bit in Stabilize it just comes to a smooth stop when switched to Pos Hold. So I assume it has something to do with Loiter braking suddenly taking effect.
IMO more folks should try out Pos Hold with heli’s instead of Loiter. Pos Hold is much more natural feeling and smoother braking, less jerky and artificial when maneuvering. The downside to Pos Hold is that if it’s windy as soon as the pilot moves the cyclic it reverts to full manual control so the pilot has to fight wind just you do in any other manual mode. But center the cyclic and let go of it and it holds position just like Loiter. So Pos Hold can be a bit disconcerting if the pilot is not prepared to actively fly the heli once he/she moves the cyclic if it’s holding position in the wind.
Bill, I can record this phenomena on the bench and share the video with you later. Basically, when I switch to loiter mode from stabilize, the swash plate till up. Does the firmware send command to these servos when the loiter mode is engaged?
Yesterday In flight the heli “jerk” back and then transitioned to loiter mode(it holds well while in loiter mode). As I recalled that I had to push the collective stick forward a bit and activate the loiter switch at the same time to counter the swash plate till up. Is it normal?
Bill, Here is the link to the video I mentioned before. The swash plate tills up when the loiter mode is engaged.
Bill, Hope you have a chance to view the video. Is there a way in firmware to control the swash plate when the loiter mode is engaged?
Not directly. In flight, Loiter is designed to hold position when the stick is centered and then hold speed when the stick is displaced from the center. On the ground with the way you are testing it, I’m not sure what the swashplate behavior would be. I know that it will not try to hold position with the aircraft landed. So I guess what I am saying is that what you are doing is not a good test of how it should behave. There are other things that could be happening as well. You see in stabilize it is trying to hold attitude so the swashplate could be tilted forward because it thinks it is nose up. Then when you switch to loiter the swashplate centers because on the ground in loiter it is designed only to counter rates and your stick position doesn’t do anything.
Hope this helps.
hmm, in the video the swashplate is level while in stabilize mode, but tilts up when I switch to loiter mode. Note that the swashplate is level when I switch it back to stabilize mode from loiter. The bench test just to show what it did in flight. When switch to loiter mode it tilted up and then settled down to hover at attitude hold.
I see what you’re talking about. What version of software? I will have to look more closely at the code. If I remember correctly, you were able to get it to hold a stable hover in loiter after you had reworked your rotor head? When I get a chance I will look at this on my heli as well. I hadn’t noticed that behavior or maybe never paid that much attention to it. It seemed like you position keeping in loiter was really good. Mine tends to wander a bit due to the GPS accuracy.
Yes, it held stable hover in loiter after I replaced the entire rotor head assembly. I can learn flying heli nose in for the first time!I am planning to put it in 450 scale Army fusage when I get a new Pixhawk module. My other Pixhawk had several nuts broke off the carry
PWB inside the module(see attached). The module was mounted upside down to the heli frame. As I understand the Cube module and the carry board are help up by four little screws. It did not survive and felt the vibration of the heli. Someone at the factory needs to review the mounting nuts on the carry board for the case the Pixhawk mounted upside down. Needs to beef up the mounting hardware on the PWB.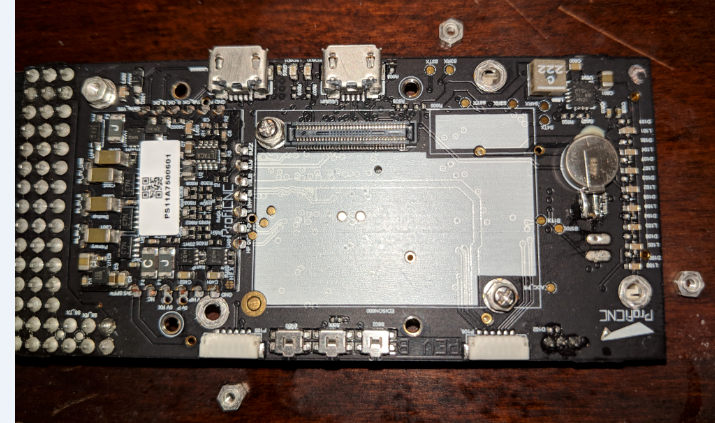
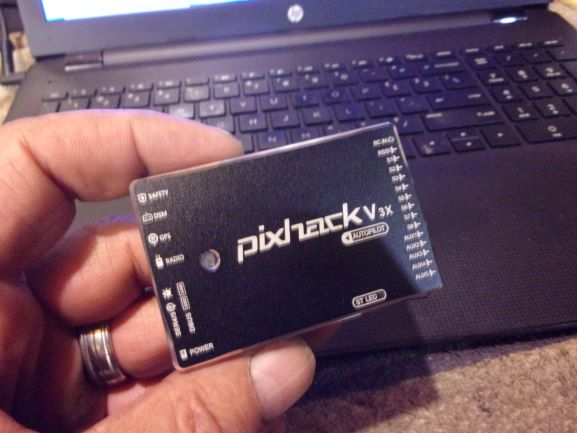
Recommend using a CUAV Pixhack V3x instead. Several of us are getting very good result with that.
Thanks Jakob. Who sell it? and can it be mounted directly to the heli frame and so no need damping mechanism.
Usually from CUAV’s Aliexpress store.
And yes, my Soxos has no damping mechanism. The V3 is also nice, compact and extremely well made.
I believe Chris swears by it as well.
okay thanks. Which version of firmware does it take? is it same version as pixhawk 2.1(cube)?
David, it takes the same firmware. For Copter 3.6 it runs fmuv3 ChibiOS (or can run NuttX if you want). But NuttX will soon be gone from ArduPilot when 3.7 arrives.
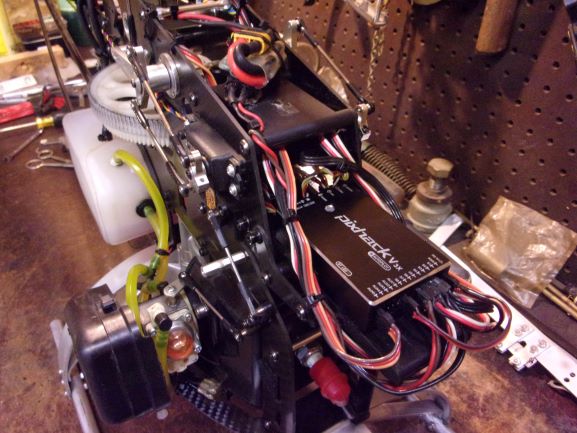
I have mine direct mounted in gas helicopters, just stuck to the FBL unit tray with Velcro. It is not much bigger than a typical FBL unit, CNC machined aluminum case, internal damped IMU’s, all end wire hookups, has 5 aux outputs on the servo rail instead of 6 because of its small size. The cube/carrier type boards are great for multicopters, but the V3 is the one I use in heli’s.
I got this one stuck to that tray in a gas helicopter with velco, mounted right above the engine.
This is what it registers for vibration in flight, never clips the IMU’s ever, even during ground runs. That helicopter handles like a dream.
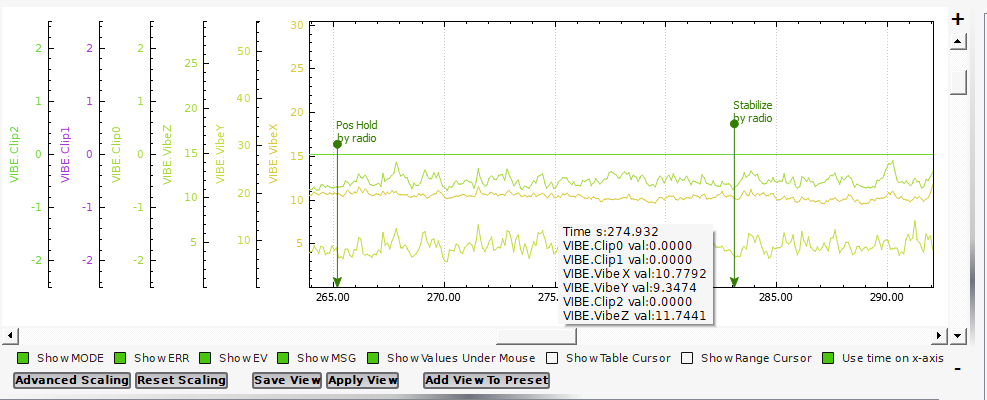
wow! vibe data looks great. I did not realize the pixhawk cube is not so friendly with heli application in term of form fit. Pixhack V 3x is great. Thanks Chris for the info. Will get one for my 450 heli.