-
Try select the appropriate port instead of AUTO. You will see a COMx port in the drop down list, once USB recognized the port.
-
There is no Pixhawk 2.4.8, the latest official hardware version if the Pixhawk1 form factor was 2.4.6 anything else is cheap Chinese knock off with important parts missing and questionable quality.
-
Support number? Sure check the Chinese webshop where you bought, there must be a Jane Sunshine, or Jackie Joy on chat who will answer all your questions
 . Seriously, the software is open source, and the primary source of support is the documentation and the forum here.
. Seriously, the software is open source, and the primary source of support is the documentation and the forum here.
The cheap Chinese website I bought it from was Amazon, and the ‘Chinese’ manufacture must have been READYTOSKY: Pixhawk 2.4.?
Didn’t know I was ordering some sort of ‘project’ board, just wanted a good Flight Controller (with customer support) for my first drone. I’ll send it back, since I can’t locate the driver(s), and the COMx port is not showing up.
It said nothing on Amazon about open source. The page looked like a legitimate vendor that would offer support, be it Joe Jilly, Jack Jones Jimbob, or Jill Jackson Farquart, but that explains the lack of documentation that came with it.
If you know of a driver that might trigger the COM port to show up, I’d greatly appreciate any suggestion before I pack this thing up.
Thanks!
If you want to run Arducopter then it won’t much matter which Flight Controller you purchase when it comes to support. It’s still Open Source and the support is offered in this forum and on the Ardupilot Wiki. There are of course reputable sources of Flight Controllers that will offer additional support. Here are a couple:
http://www.proficnc.com/
https://mrobotics.io/
That said I have a few of those cheap “2.4.8” Pixhawks and they all work well enough. Try using QGroundControl to flash the Arducopter firmware. Sometimes it will succeed and then you can use Mission Planner after that.
1 Like
Thanks for the solution, I’ll give that a good shot first. ![]()
QGroundControl will work to flash your firmware. Go to the Firmware button, unplug and plug it in. On the right side select which flight stack you want, and which version. For Custom firmware or betas check the advanced checkbox and you will see those selections as well.
The Pixhawk 2.4.8’s from various vendors are just as “official” as the 3DR ones were. Pixhawk is actually a trademark owned by Lorenz Meier of PX4, not ArduPilot or 3DR. It is an open hardware spec provided by the PX4.io project, the latest version of it being the Pixhawk4 (manufactured by Holybro).
The 2.4.8 has the internal compass in it that the 3DR iteration of it had removed, it will run the px4-v2 firmware with NuttX, or fmuv2 with ChibiOS with ArduPilot. I’ve flown plenty of 2.4.8’s in helicopters with absolutely zero issues with them and still have some I’ve flying today.
Edit: had to make a correction to this post. Your Pixhawk 2.4.8 runs v2 firmware, not v3. I was thinking of the CUAV V3x, some of which come with a fmuv2 bootloader, but they are actually a v3 controller.
Sorry Chris, but you are wrong. The last open source iteration of pixhawk1 were 2.4.6.
2.4.7 and 2.4.8 are closed source modifications by different vendors aimed at cost reduction. Most important changes are the over simplified power switching circuitry and the missing voltage level converters and buffers on every I/O ports. Not to mention the C grade sensors with terrible temperature bias.
And 2.4.6 version does contain an onboard magnetometer…
1 Like
Sorry, I was thinking of the last APM’s that came from 3DR that did not have internal mag. The post-3DR manufactured APM’s put it back in.
Despite what is “official” or not, Jay’s problem with loading firmware is totally related to Mission Planner and Windows, has nothing to do with the board.
IMO it is rather unfortunate that the “official” ground station for an open-source autopilot is developed and built on the most closed-source operating system on the entire planet, and that still uses 1980’s RS-232 style “COM” port headers on Universal Serial Bus.
1 Like
Thanks for the replies,
It is one of two things, apparently -
-
It is a compatibility issue between Windows and Mission Planner. In which case, Mission Planner developers should have the solution because it is not the job of Windows to be compatible with all software, but the other way around. Since my Arduino and other things show up via USB and various Arduinos show up as a COM Port via the USB, this doesn’t seem to be a Windows issue, anyways. I’ve updated drivers up and down the wazoo and reinstalled Mission Planner 3 times now.
-
It is a board issue caused by buying a cheaper version of Pixhawk ($70 vs $200).
So, I’ve bought that pricier board from mRobotics, and will come back to report whether it worked or it is a Mission Planner issue. I’ll just return the one that doesn’t work - or the cheaper one - whichever comes first. Matt_C: I’ve followed your steps and I get the same error:
…Mavlink Connecting
…Trying to Connect, Timeout in x
…No heartbeat packets received (‘details’ gives 4 troubleshooting tips, none worked)
So incoming is the board from mRobotics and I’ll continue to post when and iff I have that board to test. Thanks for the information, from what I understand - Mission Planner is amazing and I can’t wait to use it. I just wish it was a little more compatible if that is the problem.
Almost.
- Indeed reinstall MP from clean source.
- CTRL-F and do clean drivers
- Download and install drivers (http://firmware.ardupilot.org/Tools/MissionPlanner/driver.msi)
Otherwise you delete the newly installed drivers…
Your board ships with PX4 pre-loaded, not ArduPilot. Those boards are made by Holybro and sold thru many different vendors on the internet.
Again, QGroundControl will recognize the control and allow you to put either PX4 or ArduPilot stack in it. Sticking with Mission Planner to get the board running will be a no-go. Mission Planner is very limited in what it can do. QGroundControl is cross-platform and handles both PX4 and ArduPilot stacks.
On QGC you are still dealing with the legacy COM port issue in Windows. But QGC usually detects it and “just works”. If necessary, update the bootloader with QGC before going back to the “amazing” Mission Planner.
Thanks but no scare quotes necessary, I’m new yet can somehow remember what I typed, just fine
Tried (again) to run QGroundControl. Plugged in the Pixhawk, lights, beeps and all. Then opened QGC, clicked firmware, and I don’t even get the options to choose the flight stack.
Hi @skytrike,
Just to figure out the issue, can you confirm windows created a com port for Pixhawk? Best way to make sure that the drivers are picked up by windows is to open Device Manager and check under com ports, should be an entry there for either pixhawk or stm32…something
Gal
Hi @gnitzan, thanks,
They are there, but they are all hidden. Here’s the complete list of hidden ports:
Arduino Mega 2560 (COM12)
Holtek USB to UART Bridge (COM3)
USB Serial Port (COM4)
USB Serial Port (COM7)
USB-SERIAL CH340 (COM5)
USB-SERIAL CH340 (COM6)
PS: unplugging the PixHawk makes no change to the list
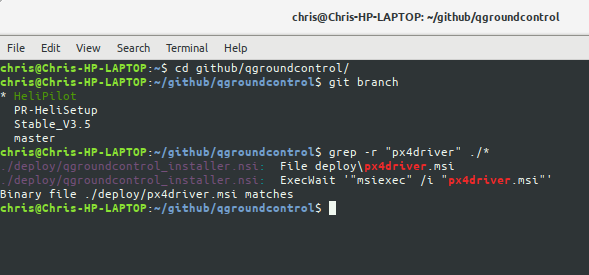
This is the process on Linux. I don’t have a Windows computer running right now to try. But if Windows won’t detect the board it is the classic Windows COM port/driver issues.
@skytrike, it seems like windows didn’t pick up the drivers (all hidden) means it isn’t active. Just do a quick search on google for “pixhawk drivers not working”
Here is the first link
HTH,
Gal
Why is there an 8-bit AVR board plugged in? If I plug in a APM controller that’s how it is identified on the bus.
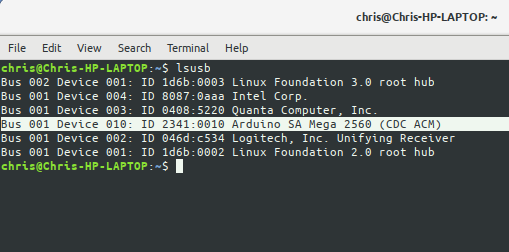
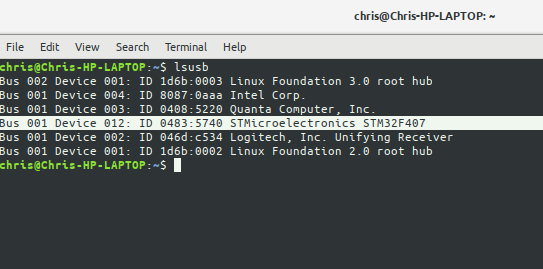
With a Pixhawk compatible controller it should be identified as a STM32
All platforms except Windows have the needed “drivers” built-in. In other words, Windows is the only one that needs “drivers”. But those should’ve been installed with the QGroundControl install unless something blocked the install or an install step was skipped. They are definitely in the QGC source tree.
I don’t use Windows so I don’t know if those drivers can be inserted at runtime, or if Windows needs to be rebooted to make them work. But doesn’t Windows have a method to show which drivers are installed? And if they aren’t installed, re-run the QGC installer and make sure something like the so-called “Windows Defender” isn’t blocking their install?
The same Windows px4 driver package should work for either MP or QGC.
This driver package is also in the Tools for MP but the checksum is not signed by a trusted source. If I’m not mistaken, on Windows this requires a separate installation step.
http://firmware.ardupilot.org/Tools/MissionPlanner/
So I spent an hour on the phone with Microsoft yesterday and they were no help, so I searched again after trying all sorts of drivers and found this software, the only thing that worked! : Zadig is what I used. Under the device list, I noticed that my computer saw PX4 for the first time, so I selected it and then USB Serial (CDC), and ‘upgrade driver’…and now it shows up in both Mission Planner and QGroundControl. There is plenty of evidence online that Windows 10 doesn’t like PX4 sometimes.
Microsoft said it was the device so don’t call them unless you have to, totally frustrating! It was Windows, after all. Thanks for all of the advice, everybody!
That’s pretty interesting. While I don’t know what MP does, the driver install should’ve been a separate dialog for QGC that is launched from the installer. I recently did some custom builds of QGC for Windows, Linux and Android and none of the testers noted any problems with the STM32 virtual com port driver install on Windows.
It would be interesting to know what blocked that driver install, or caused it to fail, on your particular Windows computer. Windows itself is 30 year old technology with a face lift, but it still should’ve worked even though those drivers are unsigned, by authorizing their install thru the dialog.
I’m not sure of the origin of that driver package in the Windows version of the ground stations, but it is a closed-source package AFAIK, and it might be out-of-date.
Good to hear you got it working anyway!
Make sure that you try a different USB cable before anything else. I changed the usb from the cheap one supplied, and it instantly fixed all of my issues. Good luck