**Can you share the parameters you debugged? I also use PIX flight control to do the same type. However, when the multi axle take-off is switched to the fixed wing, the fixed wing will rise directly to stall.Hope to share your flight video and debug parameters.Thank you very much !!!
抱歉,如果不方便分享参数。能不能给我一些建议?我的邮箱是
Sorry, if it is not convenient to share parameters. Can you give me some advice? My mailbox is 390071519@qq.com
你能分享你调试的参数吗?我也用照片做同一类型的飞行控制。然而,当多轴起飞切换到固定翼,固定翼将直接爬升失速,希望分享您的飞行视频和调试参数。非常感谢!!!
I don´t have params yet, I don´t finish my build yet, I´m a Hobbist and work during free time periods only but I don´t have trouble to share them when finish.
My idea is to enable qassist param, and try to fly and tune the quad first so, If something go bad during transition, the quad helps not to crash and try to solve the issue. when transition looks OK, then try to do plane autotune. (I have more experience with quads than planes)
I recommend you to open a thread in Arduplane section sharing your .log and preferible a photo and video too so @tridge and other devs or advance users can see what happens to your plane and help you, I can give a look too but with less knowledge, perhaps a param you have bad config for your setup.
There is no much experience about flying wings vtol so It´s going to be usefull if you can share it and resolve your issue. Good Luck
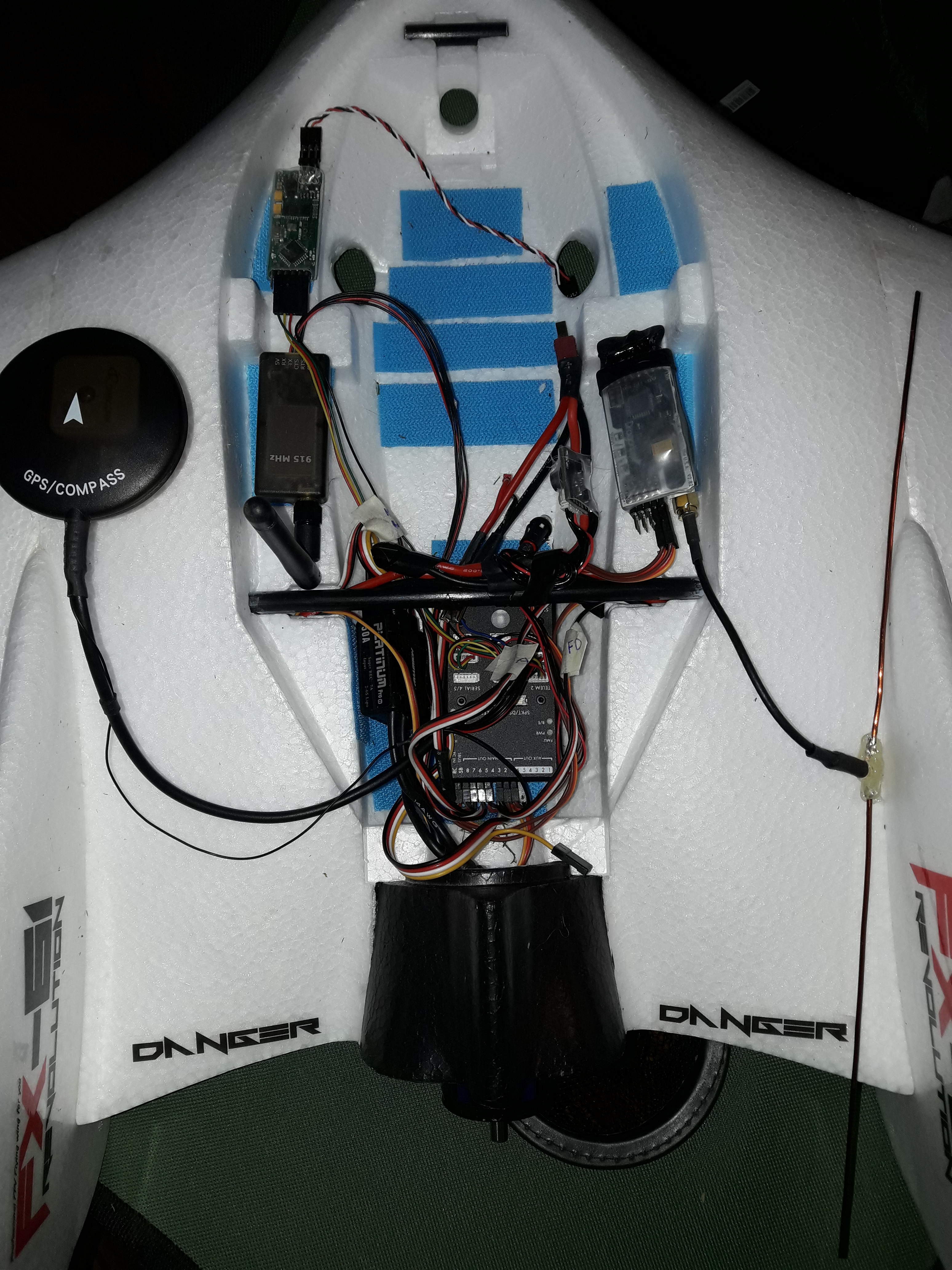
Some more advances: I visited a friend to calibrate Diy antennas but, by miracle, 433 was perfect and telemetry one only need little cut 
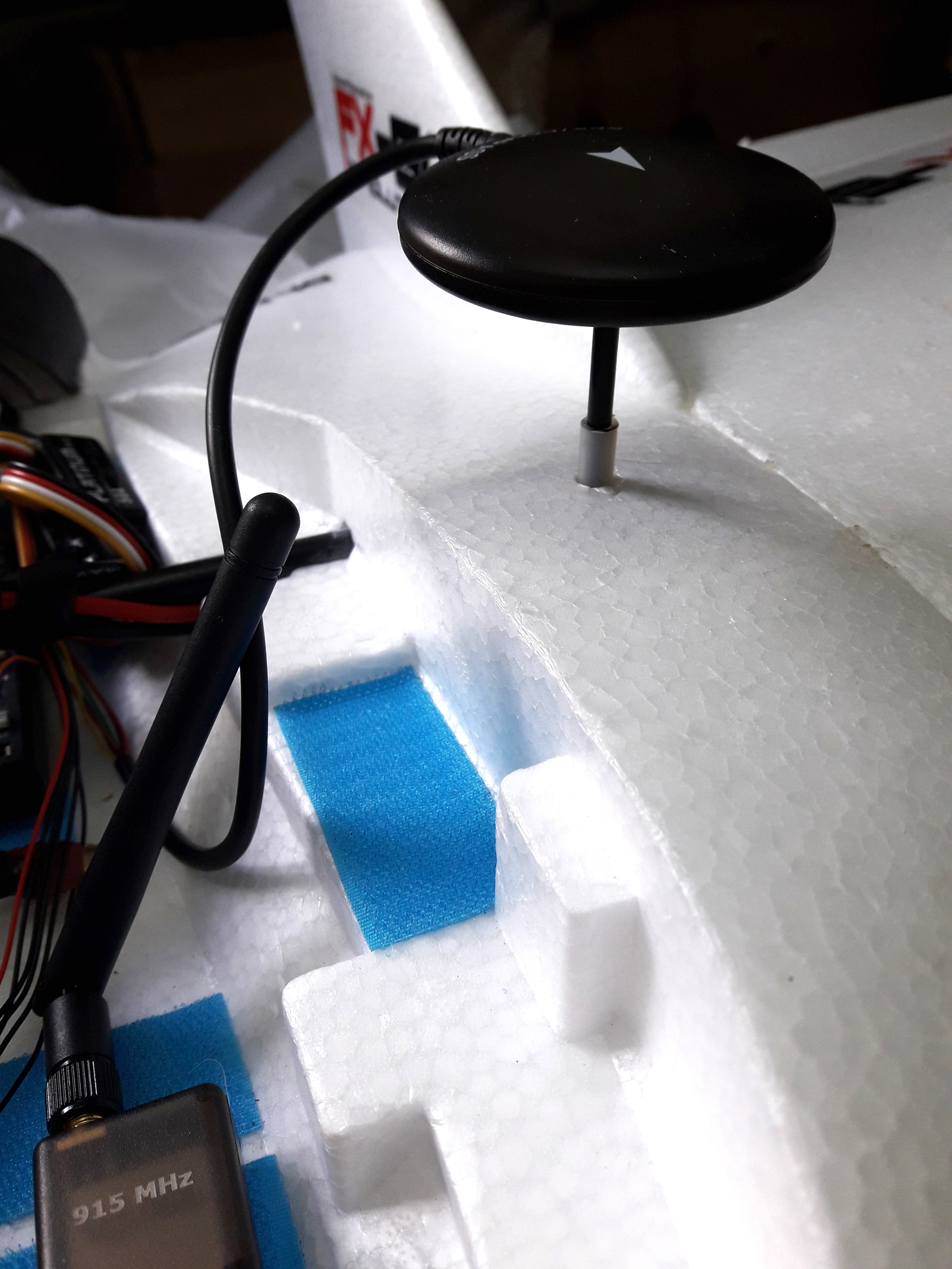
I drill a hole and install GPS

I glue a little tube into the hole and put the GPS mast inside
Now is at this stage, ready to first test the quad, I´m in winter so weather is a headhache  to fly; I can only try one time but not success to take off, something hardware related so I found a motor bad plugged
to fly; I can only try one time but not success to take off, something hardware related so I found a motor bad plugged  and waiting the rain stop to test again, I don´t installed the antennas in it´s place yet to avoid install legs until the quad fly well (for safe)
and waiting the rain stop to test again, I don´t installed the antennas in it´s place yet to avoid install legs until the quad fly well (for safe)
I move to beta fw too
Today my first success quad test, I had an issue configuration in my radio so first test fail, the copter didn´t respond as suppose to do; I found it and resolve 
1 Like


Installing GPS wires.
First I drill two holes

Them pass through the hole the wires (don´t try at home if you aren´t in winter, at the farm in a rainy day  )
)
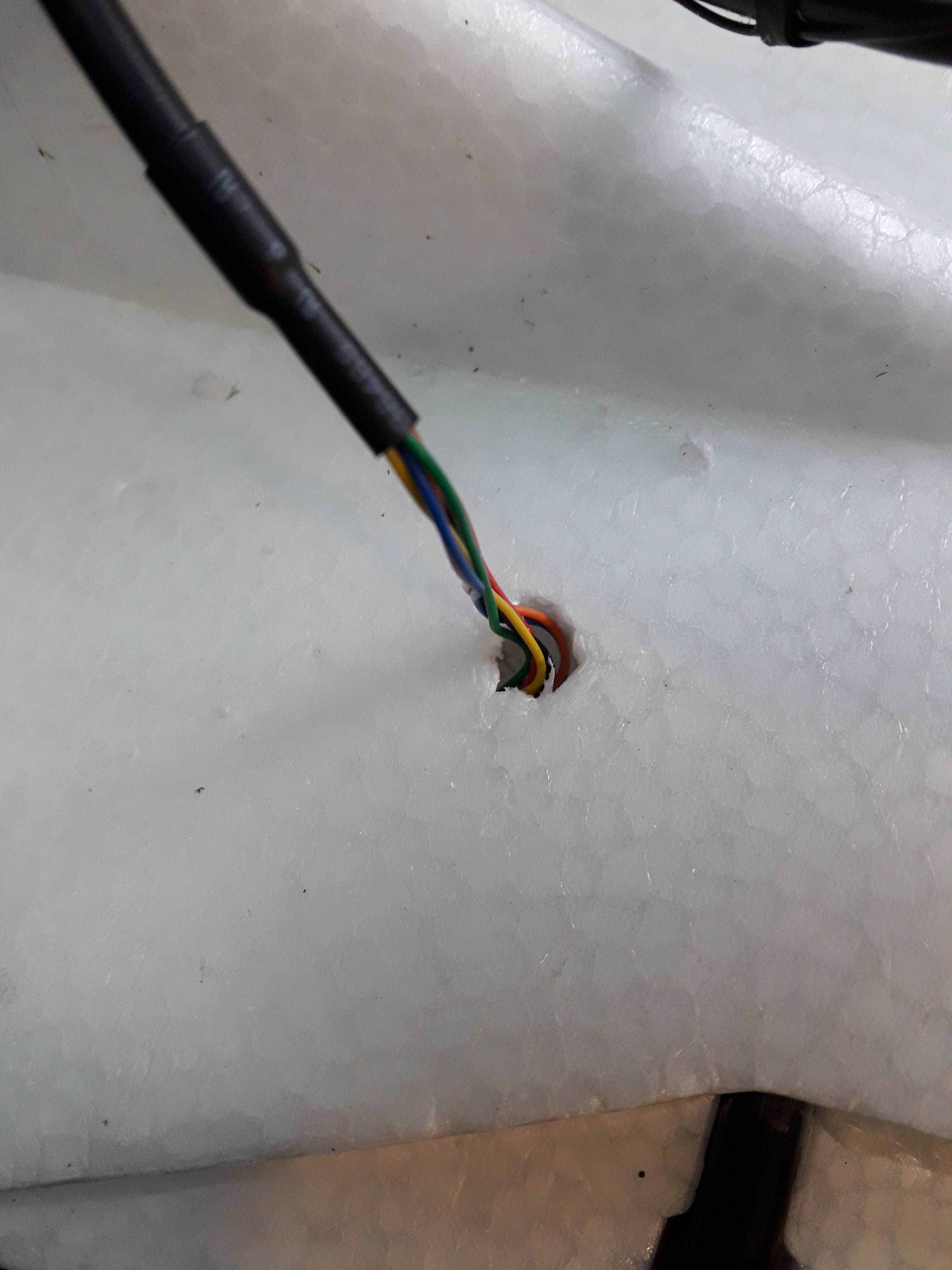
and put a plastic to protect around the hole

2 Likes
Install landing legs:
I wasn´t shure what side to choose and, finally I installed in two directions to test them, parallel to fuse looks little unstable from side to side.
they are cheap chinesse multicopter legs fixed with plastic ties so, if It has a forced landing, they suppose to broke and doesn´t broke something more expensive (better if it doesn´t test this theory  )
)


1 Like
I strongly suggest you get rid of those prop adapters and get the kind that are screwed onto the motors.
Nice work.
1 Like
Thank´s Iskess for take a look and so important observation, these are old motors that I have in list to change but you remember me not to sleep with this thing and pay special attention to new motors prop adapters.
I like your suggestion and motor choice Sunnysky X2216-7 1400KV so I bought them and now waiting to arrive next week, I have to wait more time for ´9 props to arrive; It´s looks a big risk (lot of work) try to lift up 3kg with this old motors with horrible prop adapter and one with an strange sound, I dissasemble it but I couldn´t discover the issue, bearings looks good but, perhaps they aren´t . I have a good experience with Sunnysky customer service, they agree to send me two motors with CCW prop thread and two with CW thread, they are airplane motors.
I´m going to dead of anxious with this proyect but one side this hobby 
Thank´s iskees
Finally I recived the props but weather didn´t help until now, first test I had the yaw issue like others, perhaps flexion problem so improve this horrible solution to test it

two transversal CF tubes tied with zip ties
And this is the video test, yaw issue stop so now I need ideas to make this better, I´m finishing a 3D print and think that a more rigid arms separators perhaps help.
Test is in qstab and qhover with standard params, and without plane prop, at the video end I try to take off in FBW to check what happens but it couldn´t take off at maximun throttle, it´s correct response? or it going to loose energy when I try to change to forward fly?
Nice progress. So what props are you using on these sunnysky motors ? What battery 3S or 4S ? What’s the total weight of your quadplane ?
1 Like
Thank’s Hugues. The props are 9*5 cf and weight 3 kg with two 5200 3s batts in parallel.
Thx. For 3Kg, you need at least 750 grams of thrust per motor to hover. Do you know you could then use the T-motor F80 (or even a F40 or F60) fpv racer motor with 5" or 6" props to get this thrust. This would save some weight and thus gain endurance.
3 Likes