I have a VTBird airframe running a previously crashed Cube Orange AutoPilot.
Autopilot was reset and reloaded with the crashed plane’s parameters (crash was unrelated to firmware, it was pilot error).
Running 4.3.3 for the second time for this particular test.
All new electronics, no errors in logs or on the HUD
Good control while in quad copter mode but after fixed wing kicks in she does some strange things! She once started to fly away on me at a speed of 76MPH, I got her under control and landed via QLand
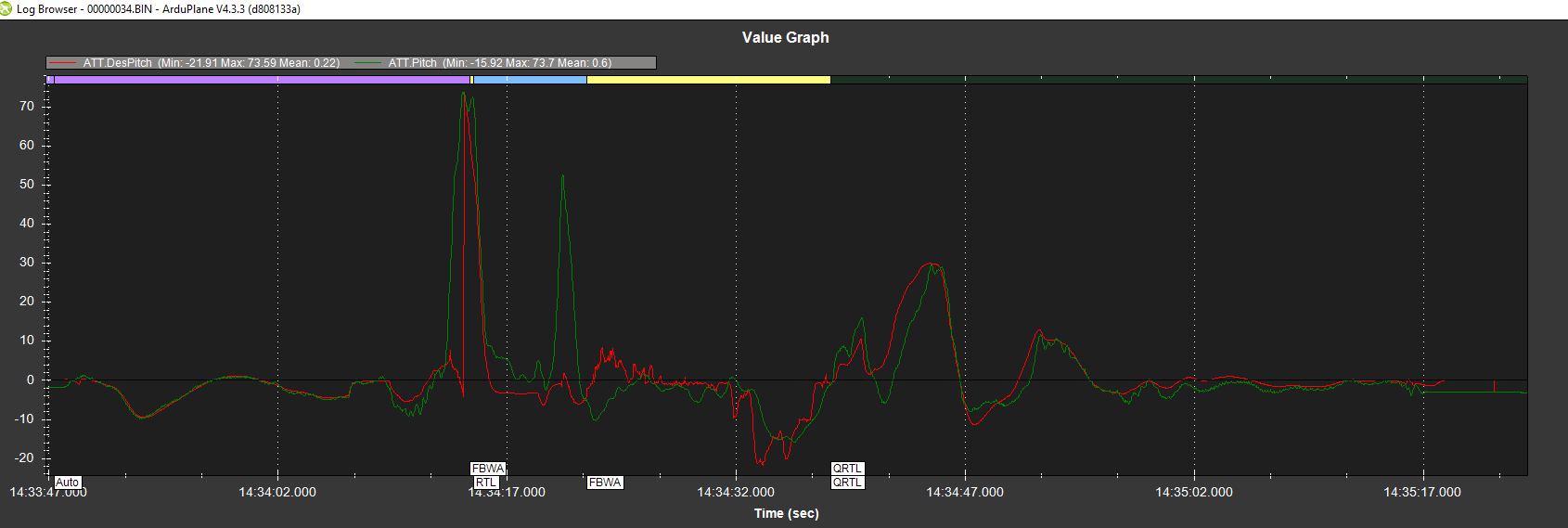
On the next testing she does a violent pitch upwards.
I can’t find a physical error for this behavior. FBWA produces the correct flight control surface behaviors (pitch down generates an up elevator, etc.).
A clogged airspeed tube was suspected in the runaway case but no FOD was found, the airspeed sensor was replaced by a known working sensor as it (during bench testing) was displaying wild incorrect speeds.
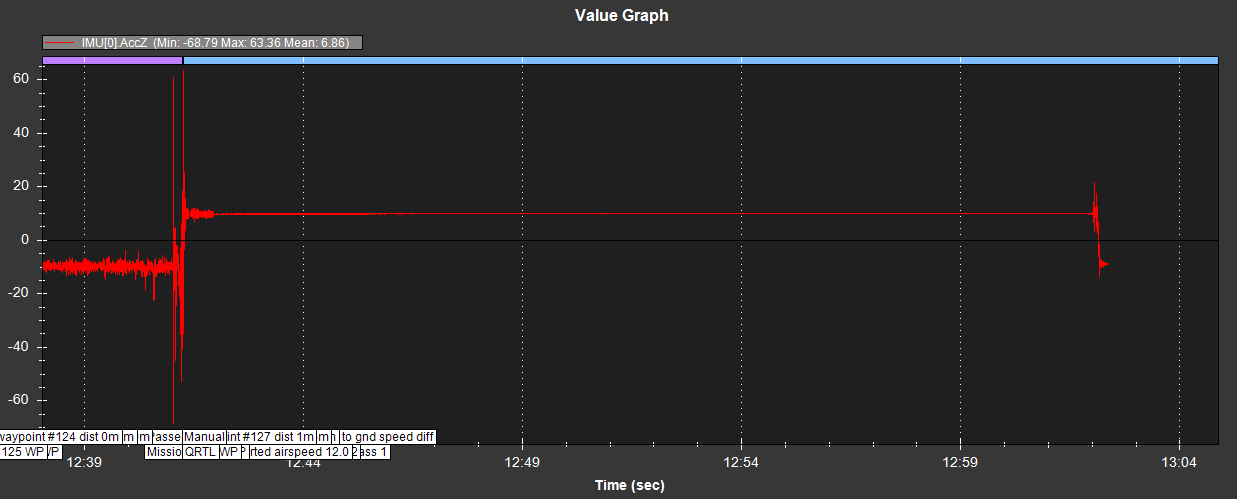
This is a pic of the Z axis acceleration experienced during a crash that the autopilot was reused from. I looked up the rating of the IMU in my version of the cube orange and it’s rated to go up to 16g’s. That’s probably NOT its max but its the info I have.
Another problem is that the .BIN files never have any units so I can’t tell if this crash was 63g’s or 6.3g’s. Anyone able to interpret this for me?
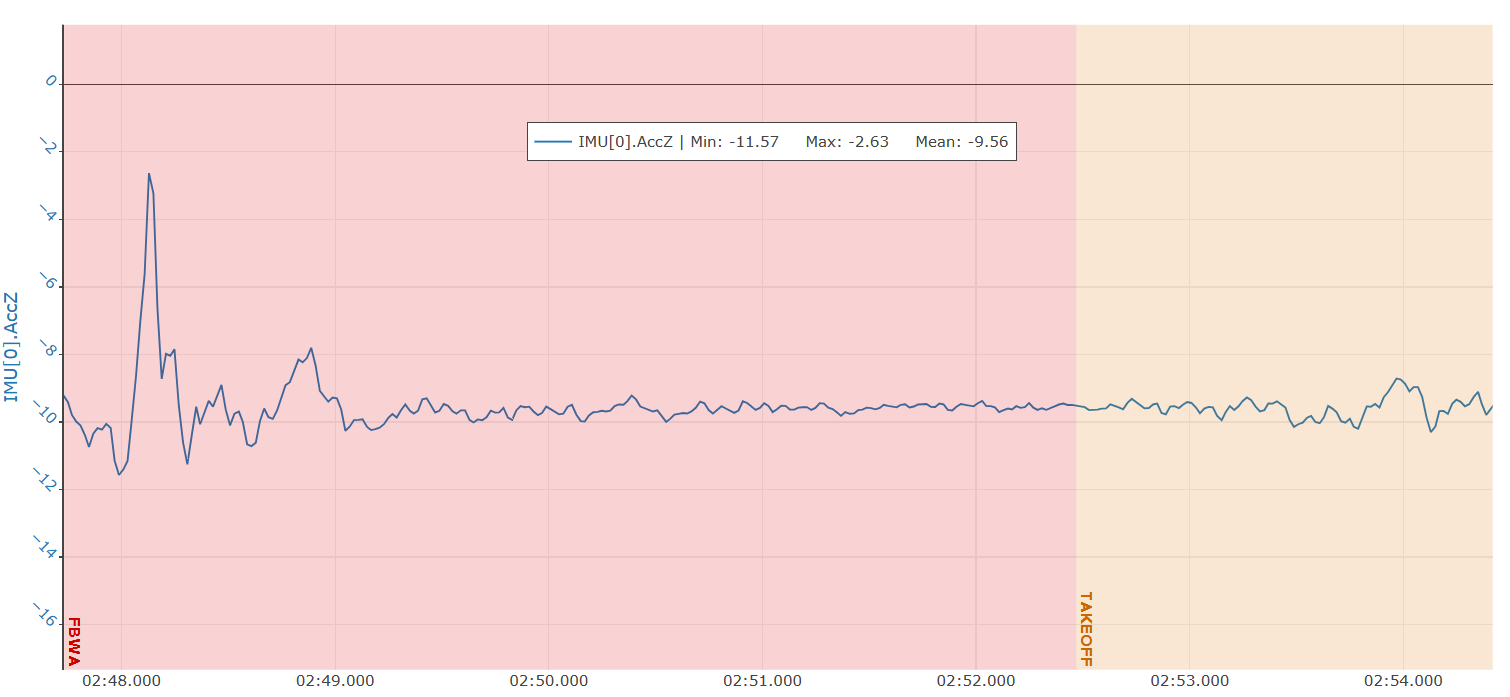
I am posting this because I am thinking that my accelerometer is busted, in the Z direction (pitch). I have no idea how to check this as the plane behaves normal on the ground (nose up, nose down etc. produces expected results).
Full disclosure… I do not use ArduPilot but have built several 4+1 conversions using PX4 Autopilot stack and maybe my experience may point you to what parameter to adjust. As a matter of fact, I’ve got a VTBird in the hopper.
From what I’ve observed, the pitch up is caused by the vehicle, which is still at cruise speed, is immediately switched to a hover mode that’s GPS dependent, i.e. it needs to hover at that GPS point when the transition switch was activated. So, the MC motors ramp up to full throttle, i.e. braking, and at the same time trying to reverse back to that point.
First question is from FBWA, what flight mode do you transition to? If you switched to QStabilize vs. say QHover or QLoiter, is the pitch up less dramatic?
Do you have a delay in blending between FW to any Q mode? Depending on the cruise speed, I typically put a 4-5 second delay between the FW motor to ramp down, slowing down the vehicle then the MC motors ramps up to hover throttle setting.
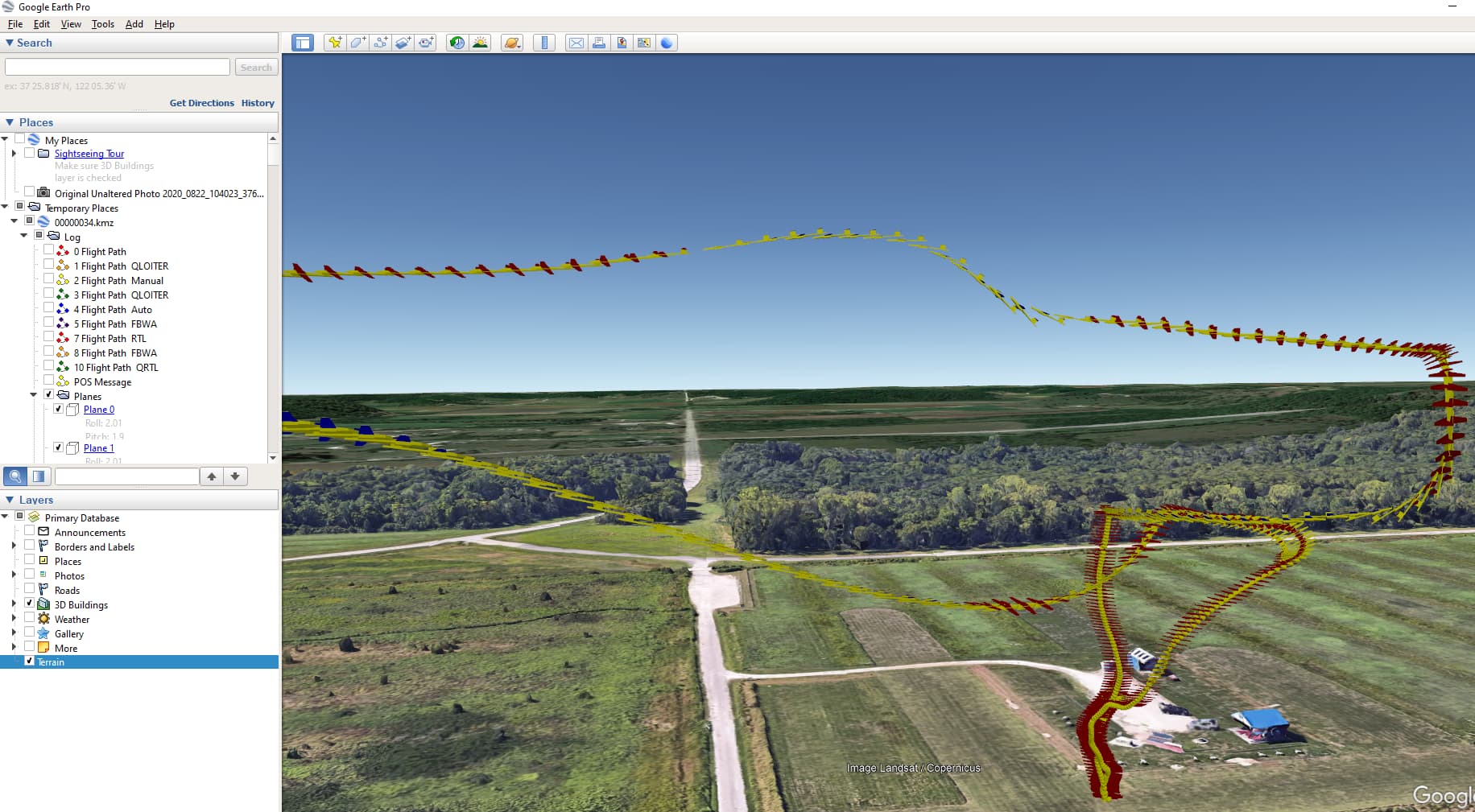
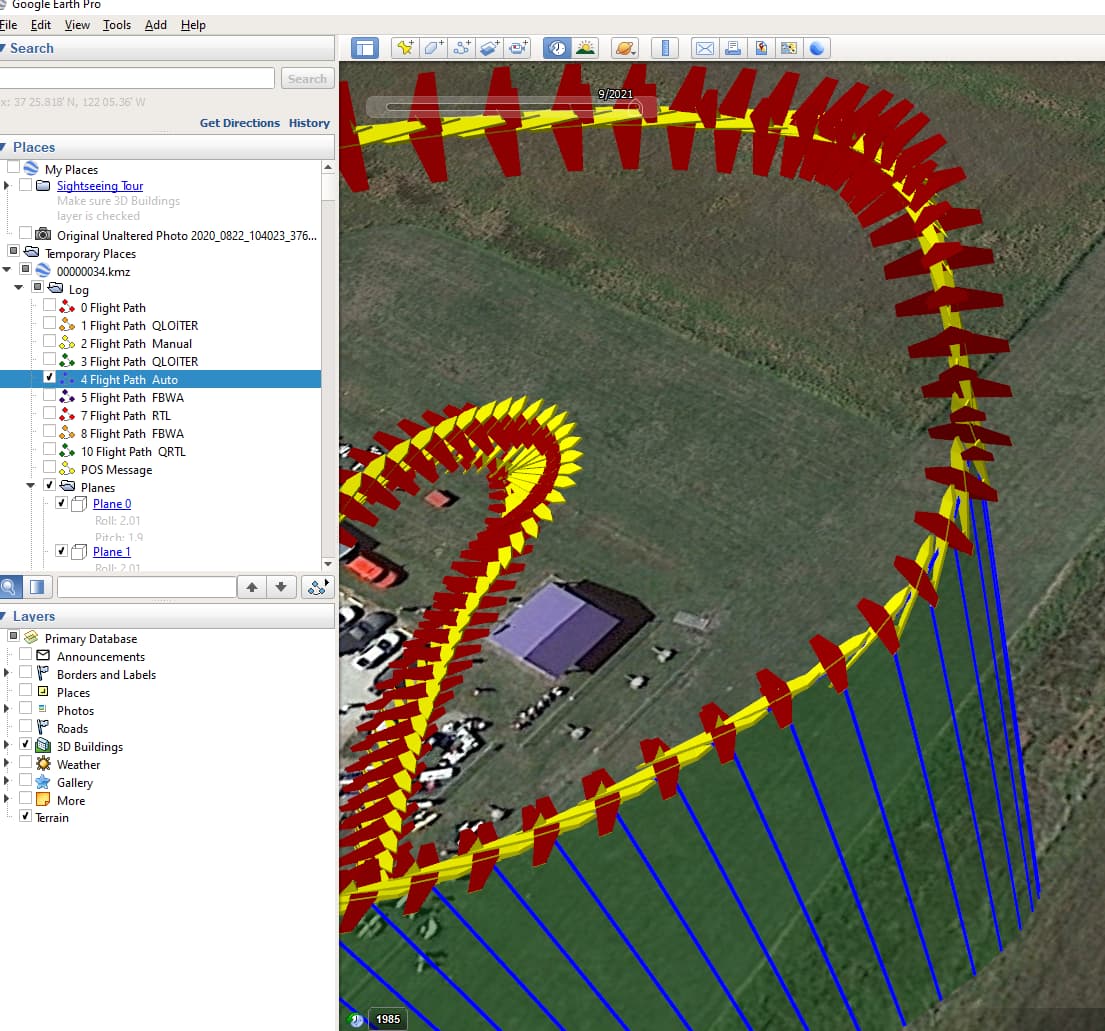
So what’s tricky here is that the pitch up was not from me (as confirmed by RCIN number 2 channel). The pitch up occurs on the very tail end of Auto mode which means that if it wasn’t me that did it, it was was the autopilot that commanded it. The thing is, there was nothing going on in the environment or orientation of the aircraft to command a 75deg up pitch, especially because the limit is 30 degrees! I’ve never seen this happen save for one time in which it was a storm front that came through and high winds hit the plane as it broke a hill’s peak. Even then, that was 65 degrees.
So in short, the autopilot had no cause to pitch up and certainly not that much. The plane went from auto to FBWA then to RTL because I use a three position switch and must momentarily pass through FBWA to get to RTL if the three position switch was in its default position of QLoiter.
I don’t have a delay like a 4+1 would have. My front two motors are on independent servos and can go from 90deg up to 0 degs straight forward in about 1 second depending on what’s going on.
Post your VTBird build! I wanna see how others build theirs.
I’m walking back my statement about 4.3.3. I flew again and three times in a row the plane did the same bad pitch up behavior as before. I have no explanation as to why the previous test flight worked like a champ on 4.2.3. I am replacing the autopilot with a new out of the box one and updated to 4.3.4.