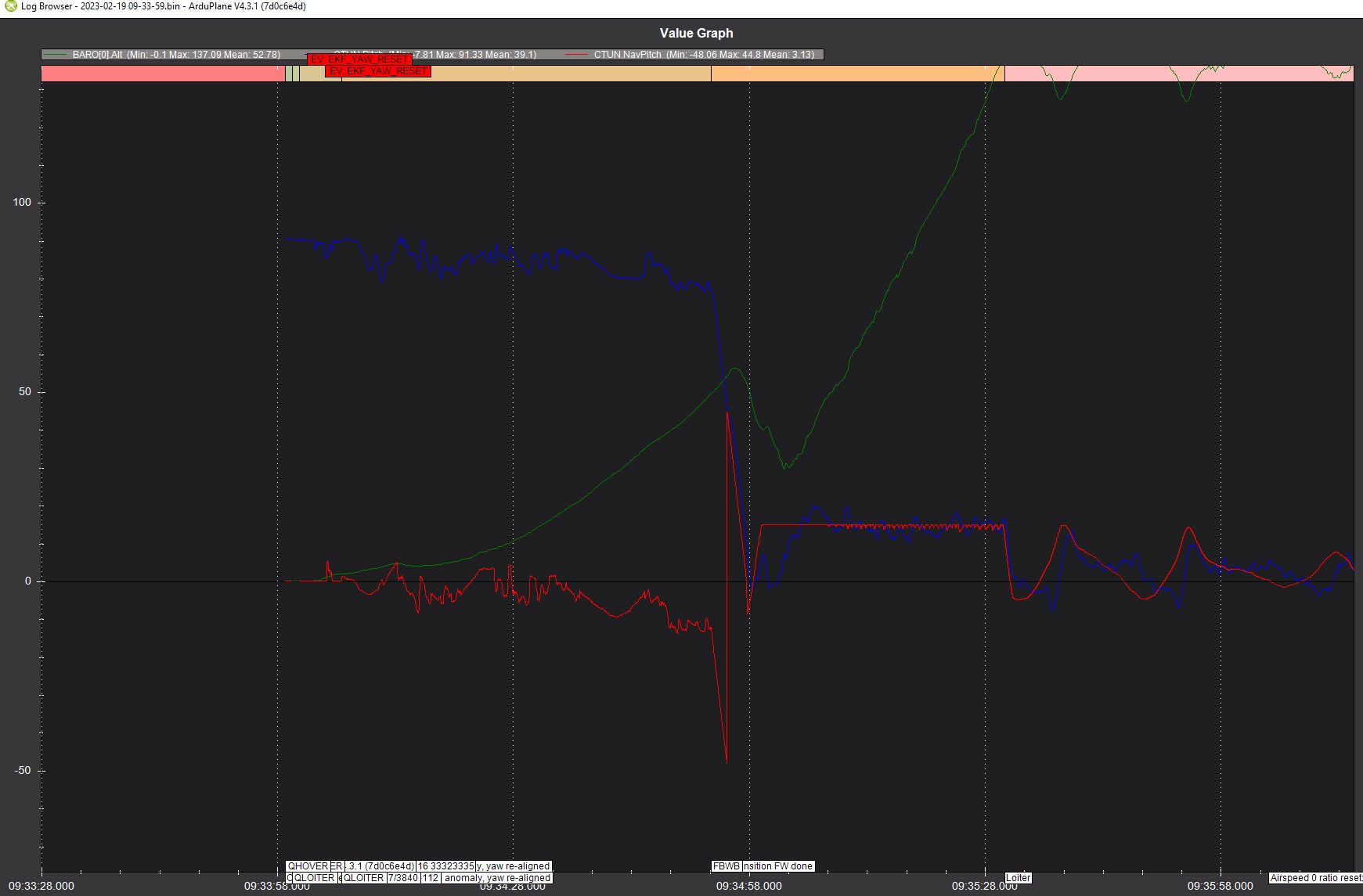
I have seen other posts about this and even posted an ask for help some time ago but have found no sound soution or suggestions. I have a tailsitter quadplane (no control surfaces) and experience a large loss of altitude during transition. See attached graph showing alt in green, nav/pitch in red and pitch in blue.
Some info provided in other old threads reference TRIM_ARSPD_CM, which I have set to 1600cm/s, ARSPD_FBW_MIN which I have set to 25m/s and Q_TRAN_PIT_MAX which I have set to 3. None seem to be out of whack so looking for some help/suggestions. Why the heck is it pitching down so much during transition? Do I need to lower the target speeds? Is it diving because it thinks it is stalling? Thanks for any input! Params attached
swan feb 19.param (25.0 KB)