There is an issue I am having some trouble understanding.
I am using a range finder in my drone. I try to maintain a very stable flight (alt-wise) so I have reduced the MAX_PILOT_SPEED to very low values when in stable flight.
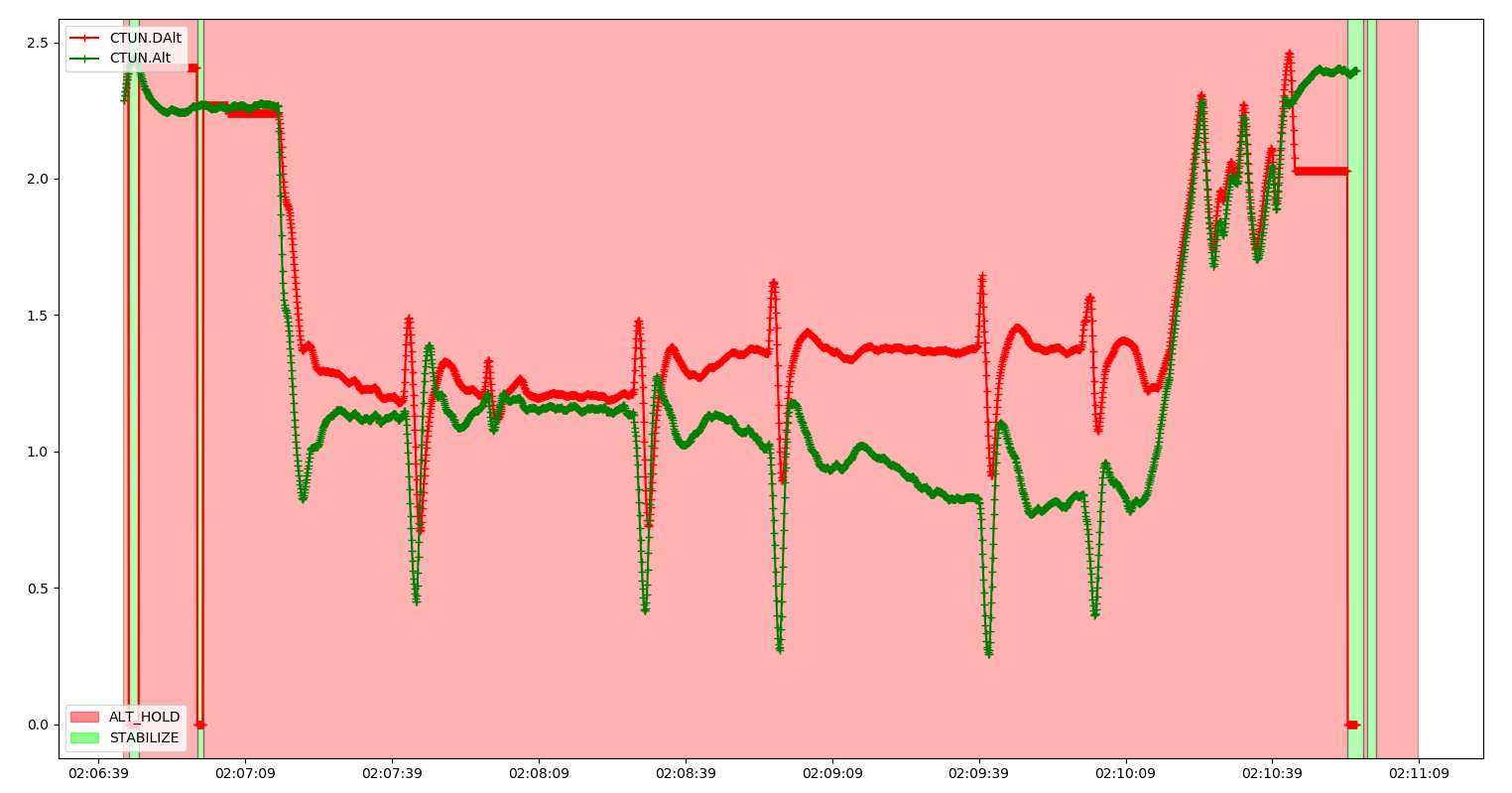
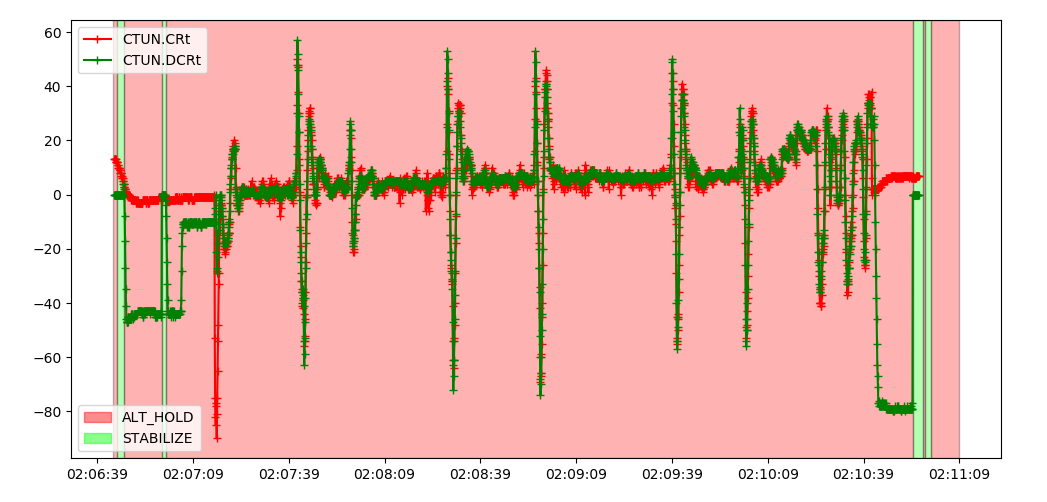
It seems however that there is
a small drift in the NKF1.VD which prevents the drone on fixing the altitude error compared to the range finder which maintain altitude. The estimated velocity is about 5 cm/s where as the altitude from the range finder is at about -1.5 cm/s .
At the beginning of the flight it’s ok but then something gets weird.
ArduCopter 3.6.x is very old and no longer actively developed.
Please update to ArduCopter 4.1.3. If the problem persists and we are able to reproduce it, it will probably get fixed very fast.