Hello,
Recently I’ve had a quad going in and out of EKF-Failsafes. The same quad flew 5 completely normal flights on that same day.
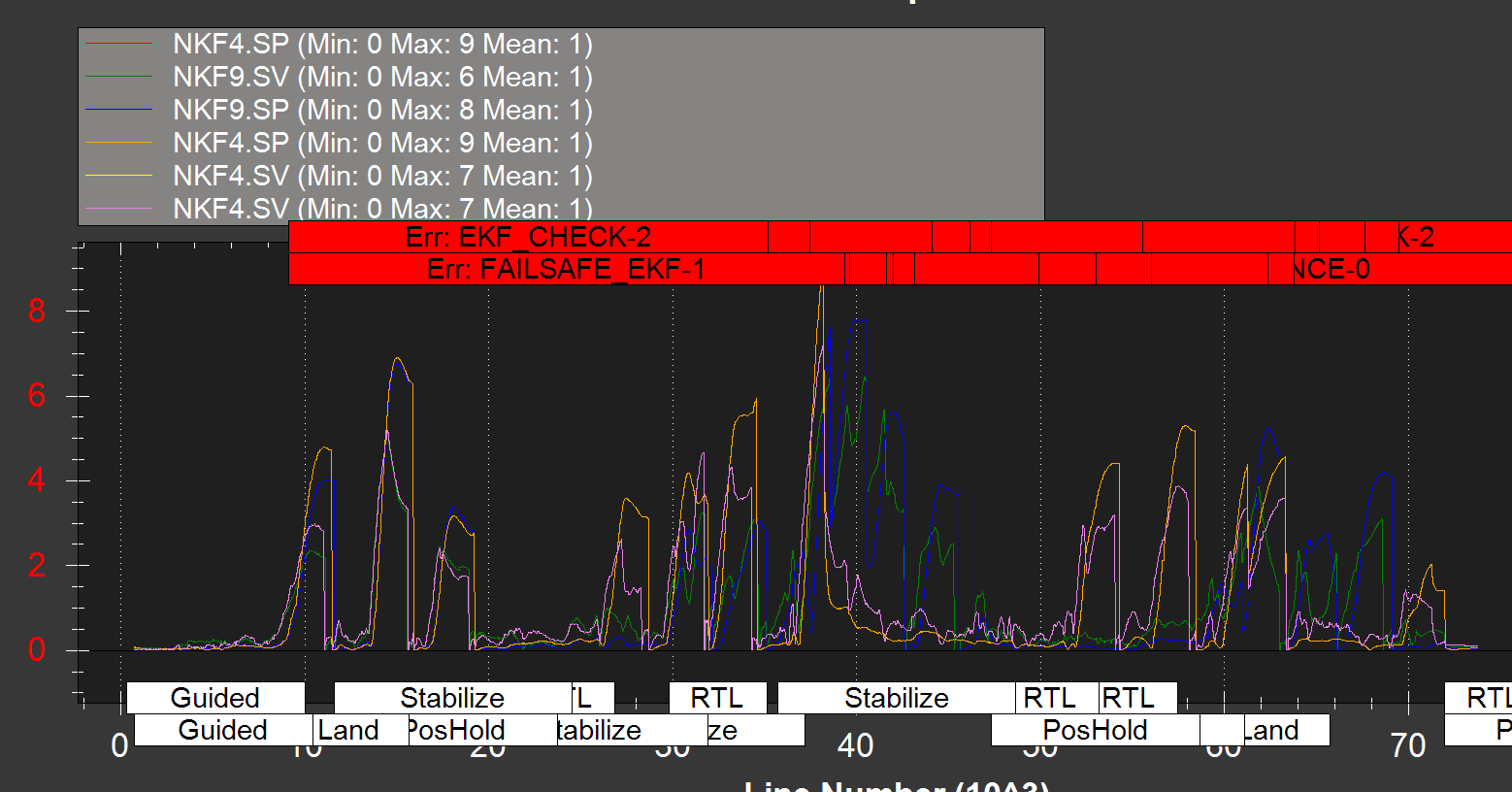
The log shows sawtooths on EKF/Normalized GPS Innovations":
Compass & IMU looks normal.
Before diving into the EKF code to understand what’s going on - Is there a checklist to go over when seeing such jumps in the position / velocity innovations?
Thanks
Nitay