I have an Omnibus F4 Nano v6.1 running ArduPlane V4.1.0dev (ab2e429f).
I had some issues in loading this fw on this board (see Omnibus F4 Nano v6.1 missing basic parameters), but after some help everything seemed to work fine, except for the artificial horizon sometimes going crazy.
I already flew several times with this plane: everything’s fine for 2 hours, than suddenly the horizon starts to drift, and the autopilot tries to compensate it (actually driving to a crash).
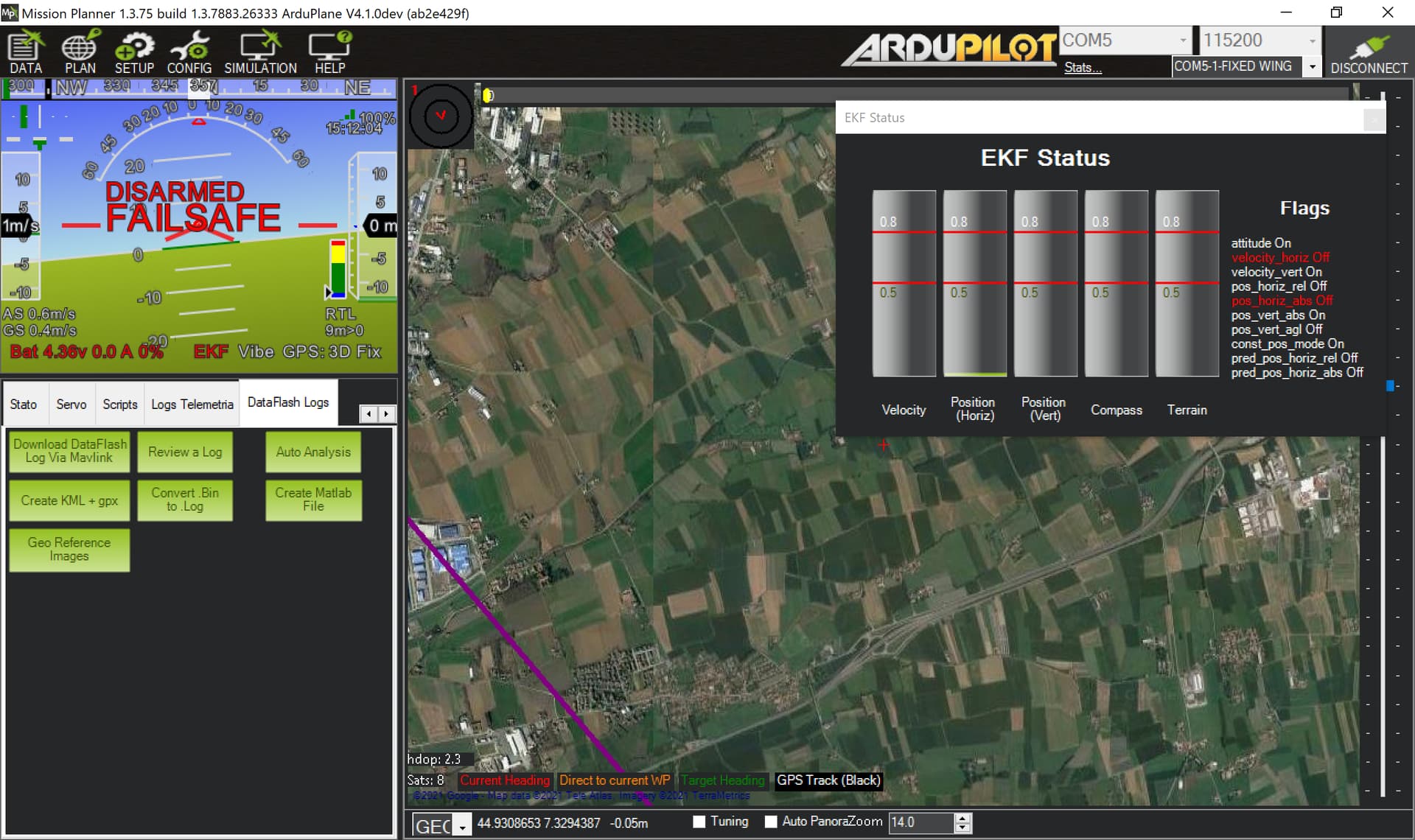
If I connect via Mission Planner, I constantly get the EKF status RED (see attached), and sometimes after a while I do see the horizon going crazy while perfectly leveled on my bench.
May this be a firmware / setting related issue, or this is just a faulty IMU?
Thank you anyone willing to help. Attached a screenshot, and my setup file (which actually flies very fine on a first unit of the very same plane).
Max
You mean a log file I guess.
I can’t provide one as logging is disabled (this board has a small memory, I disabled logging in order to avoid getting the annoying “chip full” warning in the OSD).
Should I make a new flight and “hope” the problems arises again? I almost crashed it all last time, as I didn’t had the time to take it back into manual.
Ok, I will enable the log and perform some flights.
Anyway, there’s no compass enabled, just one ESC and quite far, GPS is interesting but I don’t understand how it can affect the horizon.
I enabled the log_bitmask enabling all fields (attitude, gps, ctun, ntun and so on), performed a flight (unfortunately with no issues) and checked for the log: there’s no log available to download.
Anyone knows if maybe these small boards actually can’t record a log? Any other parameter to be enabled instead? You have my parameters files in the first post.
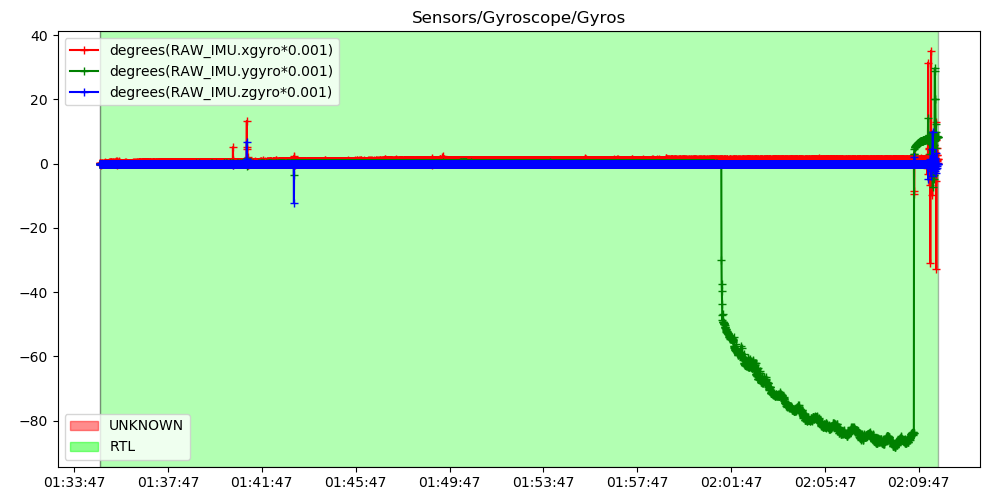
Hi tridge, I didn’t succeed in enabling the log (still thinking these boards maybe can’t log), but I succeeded in getting a gcs tlog. I attach it here.
The plane is standing still on my bench, I just touch it once just to check if the horizon was reading fine. Everything’s still for long time, than suddenly the horizon on Mission Planner starts to drift crazy, while the plane is still on the bench.
It drifts, turns, and so on, than stabilizes in a non zero position. Few seconds before switching off I moved the plane a little bit: the horizon actually recognizes the actual movements, and sums them to the crazy ones.
Hope the tlog will help understanding what’s the source of the problem here.
On a long shot here, but what are you using to power your plane while you’re testing it? I ask because I have a F405 board that when powered just by USB the HUD goes bonkers if I let it sit for any time. However when powered properly by a battery it’s rock solid and flies well.