After update to with V4.2.0dev (2251293e) version, made a manual tune, find and set Q_TAILSIT_DSKLD value, yesterday I made : the first sucesfull sequence QSTABILIZE > FBWA > QHOVER > LANDING THANKS TO ALL COTRIBUTORS, GREAT JOB
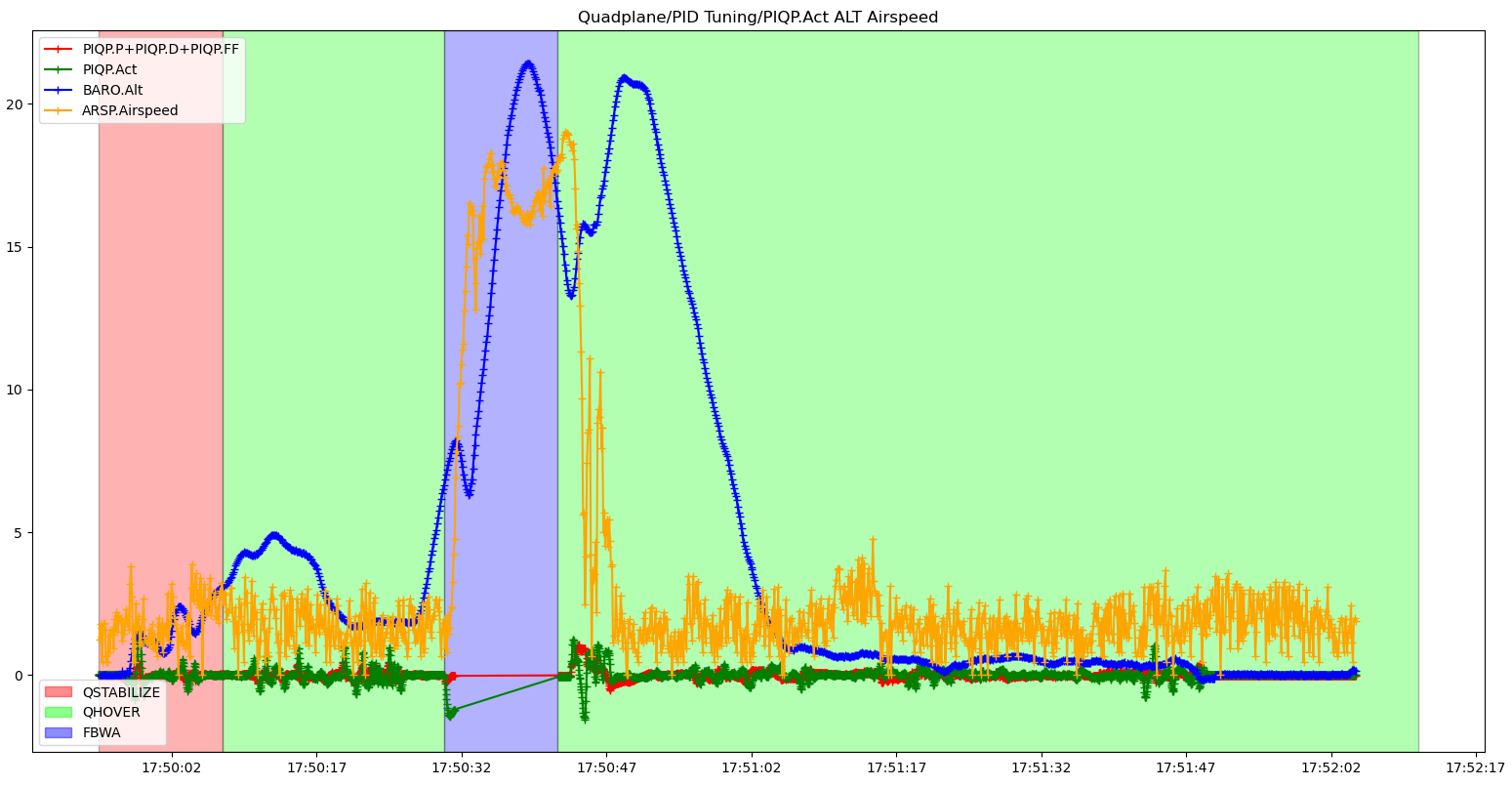
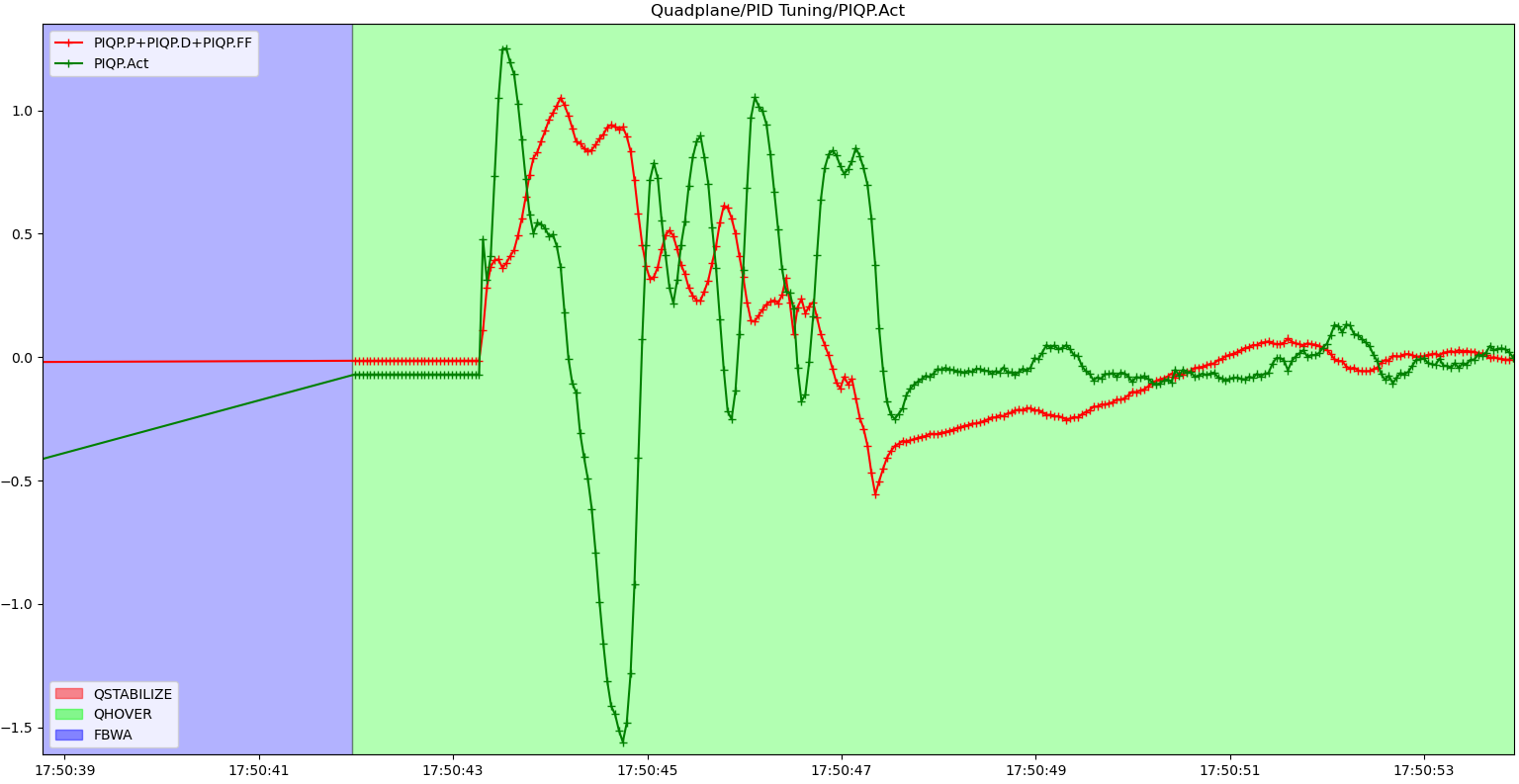
your transition angle is 45deg, with a target rate of 50deg/s of up pitch for the transition which you are not getting ,so it times out after ~1.4sec when you have only reached <20 deg up pitch…it then goes into QHOVER and drops the throttle a bit since you are still coasting up in alt a bit…this compounds the problem of getting the nose up to 90deg…you start to drop in alt so QHOVER raises the throttle to stop the drop, while you raise the stick demanding even more climb rate…this creates enough airflow that the elevons now get effective and pull the nose to 90deg and you hover…my guess is that your elevons are too small…
issues: your control effectiveness is low raising the nose to 90deg for VTOL and can only command a low up pitch rate in the initial part of the transition, so it times out…
you can lower the backtransition angle to 20 degs, but you will still be in the same boat…I think you need to increase the area of the elevons…for a non vectored tailsitter they are usually 33-50% of the wing chord to obtain sufficient control effectiveness…you can also fly much faster in fixed wing before the transition, but that will also create zooming…and not having enough control authority will bite you when you try to move in VTOL modes…pitch is especially susceptible to getting the “leans” in hove where you pitch it forward or back to move and it gets “stuck” and cant be brought back to 90 deg unless you give it high throttle to increase the airflow over the control surfaces…this is why vectored thrust is popular since it gets a lot of direct control for pitch and yaw
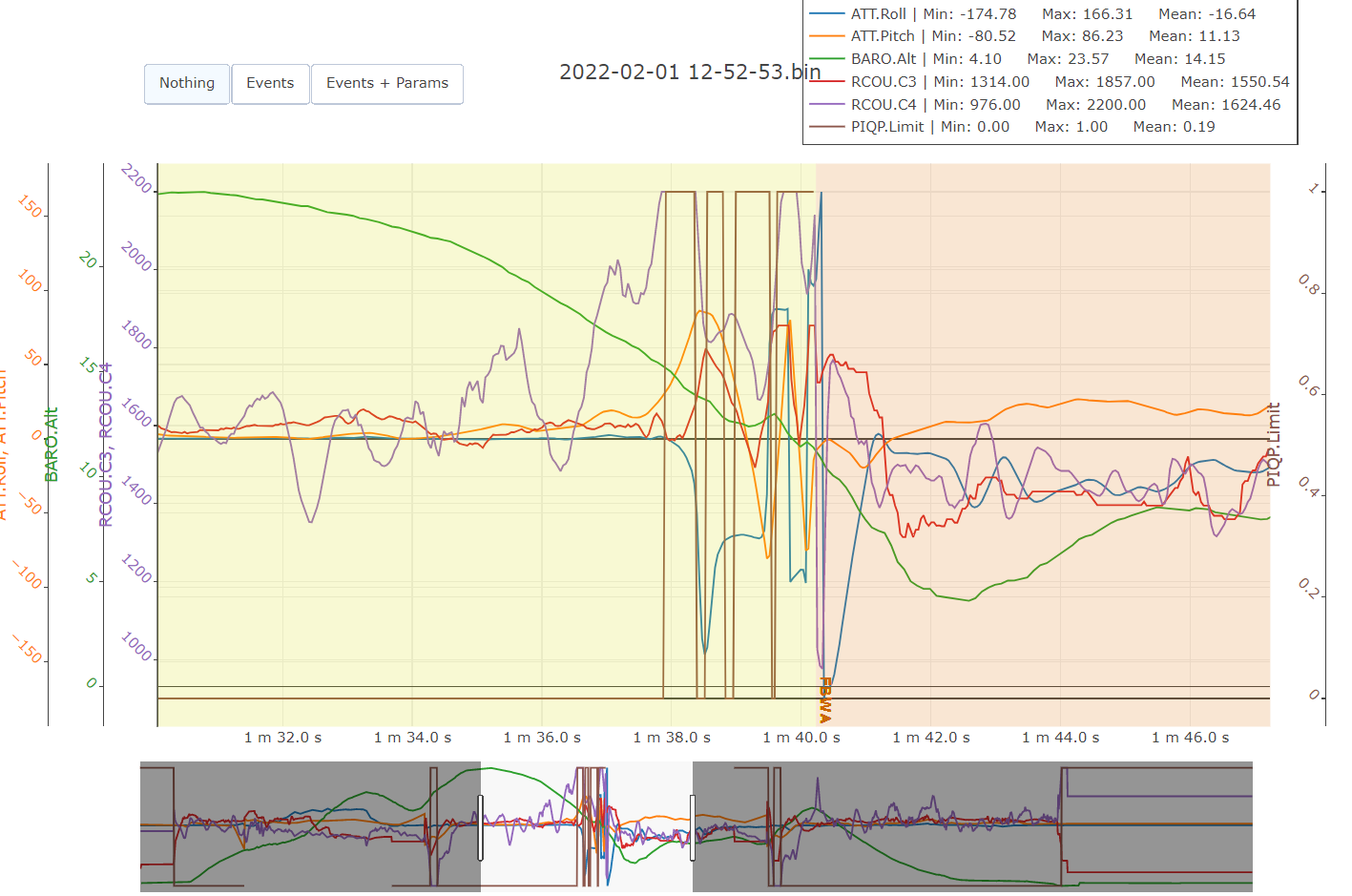
Hi @melc good to see the progress. Looks like you lost control during QHover descend in the second flight. Log shows elevon saturated and AP cannot correct then.
Q_A_THR_MIX_MAX and Q_A_THR_MIX_MAN to 0.9
This set throttle vs attitude control prioritization to high. Throttle will kick in when the plane lost attitude to recover.
Check Eclipson E VTOL thread and other VTOL Plane threads for detail.
Good to see the progress. I see you had scary moment in the first 15 seconds until you exit to FBWA. Noticed you have very PWM range set for RCOUT.C4, 900 to 2200. Does the servo really move to that?
One advice I got that could apply here is to raise q_a_rat_yaw_I and Imax, as high as 1. I see you struggled to point wingtip to the wind a few times?
I see you had scary moment in the first 15 seconds until you exit to FBWA
yes, strange, but with 4.2dev version, the wing it’s like a spinning-top, it’s a real joke , at the limit of the fun / afreid ! I really think this experience very interesting and Great Thanks of the DEV IMPLEMENTATION EFFORTS
Noticed you have very PWM range set for RCOUT.C4, 900 to 2200. Does the servo really move to that?
HI to everyone!
I’m going to make a Duo Tailsitter with vector thrust, and also is a Belly sitter. I start developing using PX4, I’m new with Ardupilot because this Airframe Configuration is not support by PX4. But I see works almost the same way or exactly the same.
My question is, any recommendation related to parameters of this configuration, what are the most important ones, I already read all the documentation from the Ardupilot related to Tailsitters, but the expertise of you devs sometimes is more important that the documentation.
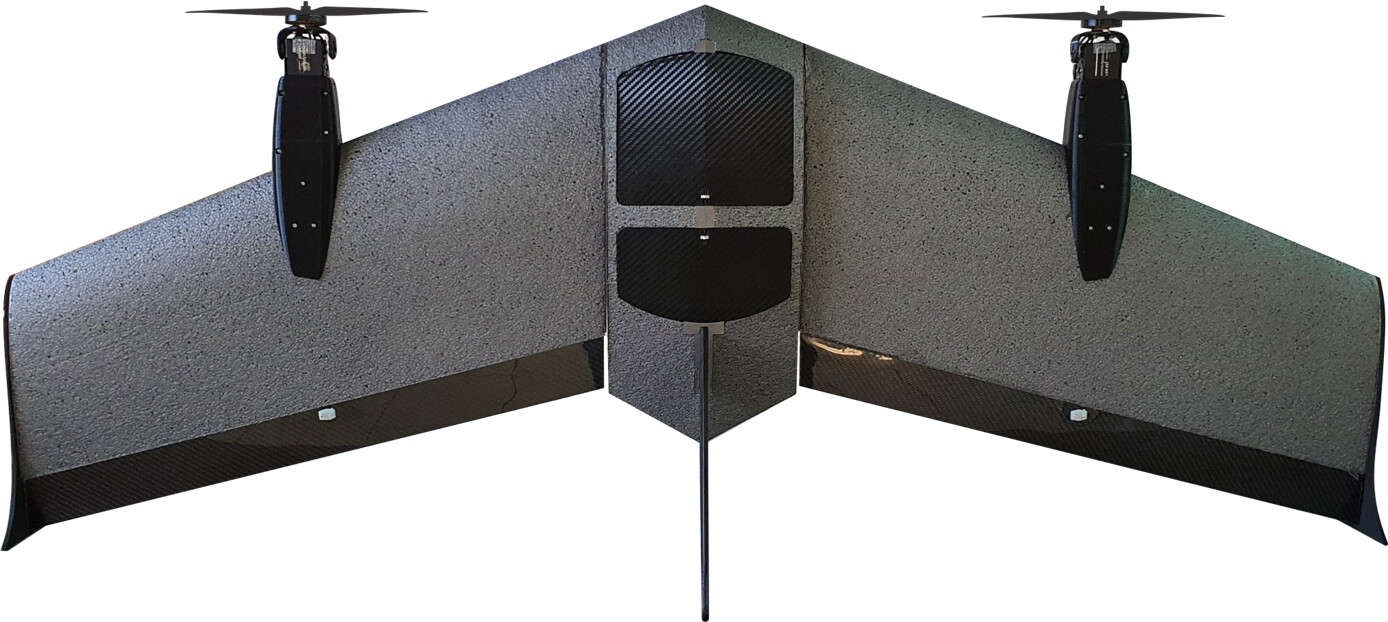
looks like a bit larger version of one of mine: C1 Chaser TVBS conversion
doing a comparison of the Q_ params might give you some insight…if you use the “latest” ArduPlane firmware there are some new params like Q_TILT_ENABLE and Q_TAILSIT_ENABLE that need to be set to 1 since they now hide the tilt and tailsit parameter tree…
Awesome! Perfect, yes I see that some are hide and I need to set 1 both and then reboot to be available that extended parameter tree, I’ll let you know my advances to everyone!
Thanks a lot!
Battery: LiPo 4S 6000mAh 25C, Li-ion 4S 10500 mAh 25C
I already do the Bench test, I have all the orientations and movements in the correct direction, about flight modes, which ones you recommend me? And about the PID tunning, what parameters you believe are the most important?
Así es, pero pulir es un gran trabajo y conlleva mucha experiencia que considero totalmente usted la tiene. Tengo 20 años estudio ing Mecatronica en Mexico, y estoy próximo a terminar un tailsitter con vector thrust para aterrizaje en vientre, espero y me apoye en cómo usted planea una mission autónoma, me interesaría ver cómo es su flujo de trabajo en los commandos para después de que lea haga el tunning y vuele manual muy bien, ya al aeronave empezar tirar misiones automáticas así como usted lo hizo impresionantemente, estoy al tanto de sus consejos! Saludos amigo @Aticof
Hi guys, first time posting here! Hoping someone can lend insight to my problem.
Built a non vectored twin motor tail-sitter (my 5th one, just love this VTOL stuff). It has developed this problem where (in Q-Stabilized) he will respond well to my pitch forward command, even in relatively stiff wind. When I ask him to pitch back toward me, he seems to only have the ability to cope with about 15 degrees and he begins to fall so rapidly that forward pitch is just inadequate. I’ve adjusted Q_ANGLE_MAX to 80 but it doesn’t seem to help. I’m using an omnibus f4 with AP 4.1.6 (eddf0367)
My log file is here https://drive.google.com/file/d/1A91-K5M6Tk71QwRH2Uxq_y61wxp8kV2d/view?usp=sharing
And speaking of, I’m not the best at reading logs - does anybody know of a youtube channel or other source that does a good job explaining how to set up and interpret logs?
UPDATE: Found the problem! Turns out it was that one of my elevons was actually being mechanically limited in one direction (guess which one, lol). He behaves MUCH better now . Regardless, I have still learned much in this discussion and thanks to Marius, Satoru and Henry’s points on Marius’s vehicle.











 . Regardless, I have still learned much in this discussion and thanks to Marius, Satoru and Henry’s points on Marius’s vehicle.
. Regardless, I have still learned much in this discussion and thanks to Marius, Satoru and Henry’s points on Marius’s vehicle.