Shouldn’t feel much different from the bigger one in VTOL and FBW modes. The question is whether it will seem faster or slower in forward flight. I’m guessing slower.
What flight controller are you planning on using for that?
Probably the mRo x2.1:
with the ACSP5 power module and a Matek SAM-M8Q gps.
It looks like the X2.1, ACSP7 power module, buzzer, and BEC (for servos) will all fit in the FC compartment. Will have to put the GPS and RC RX in the nose.
Weight will go up by 19g since the stock FC was only 12g and the replacement parts + GPS add up to 31g.

2 Likes
I bought a mini Convergence after all…I’ll start by learning to fly it stock – got a BNF on Ebay, let’s see – but do hope to get around to AP-zing it. Except if something like the VT-Bird becomes available or the blackFly-like design matures quickly.
@kd0aij the mRobotics gear you mention is rather more expensive than the Matek @GregCovey uses for his “Full” Convergence – is that FC + power module a better form factor for three Mini version? Any other reasons?
That’s a good idea. I wasn’t able to fly mine stock because the FC is only compatible with the new Spektrum receivers and my transmitters refuse to bind with them.
It looked like the Matek Wing was too large for the mini, and the X2.1 was the only FC I found that is small enough and has enough PWM outputs. But yes, it winds up being significantly more expensive.
I maidened my mini-Convergence with the X2.1 yesterday and it looks like it’s going to be a lot of fun to fly:
2 Likes
Hi Greg & Mark. Thanks for publishing such great work. I am new to the ArduPlane scene but have several successful Inav plane & quad builds done. Your posts inspired me to buy a second hand Convergence and a new matek to attempt this build am hoping to learn a lot and create a working model. Have got the matek in situ flashed and wired. Awaiting a new tbs nano and beltian bn880 gps/compass. I am sure to run into learning issues etc on the way so I hope you don’t mind advising me if things go wrong.  Thanks for the great thread…
Thanks for the great thread…
@davidabevan Welcome to the ArduPilot community. The Matek F405 Wing looks like a great flight controller at a great price. Best of luck with the Convergence; I think it’s a great choice for a VTOL plane.
Many thanks. Will let you know how it goes. From your thread is there a best firmware and parameters file you recommend after your tests. As an Ardupilot beginner any advice would be greatly appreciated. I have uploaded firmware version 3.10.0 firmware version type DEV
Also parameters file dated 12/9/18 also from thread.
Kind regards
Dave.
Greg’s parameters should be fine to start with. I haven’t done much tuning on mine, so Greg and Henry’s advice on PID parameters is probably best.
For initial testing the stable version of ArduPlane would be safest, but I’m not aware of any known tiltrotor issues with master or my branch with the added manual throttle channel.
Since you’re new to ArduPilot you’ll want to look at the wiki material for tips on setup and tuning. In case you haven’t read them yet:
The QuadPlane section is http://ardupilot.org/plane/docs/quadplane-support.html
and the tiltrotor subsection is http://ardupilot.org/plane/docs/guide-tilt-rotor.html
Thanks Greg for posting this. I am now building a Covergence with the Matek as you have inspired me to try. Have used Inav in the past for my projects so a steep learning curve expected.
Thanks Mark.
Yes i see i need to change firmware thanks for the links. The documentation is there but knowing what keyword to search for can be tricky as a beginner. had same issues with Inav until i figured my way around.
Hi all.
Am progressing a bit. Need some info please.
In qhover mode whilst ground testing props off etc My elevons still react to compensate and tilt rotors are @90 but aren’t changing. I thought the elevons shut down and tilt angle plus rotation speed of motors controlled hover. Have scanned through the wikis can anybody confirm for me please. I did have issues getting the parameters to to load being new etc and so am unsure so far. Sorry for long post
Hi Dave,
Here is my latest param file which should work fine for you if you are using the same servo connections with the Matek F405 Wing. It says “normal” in the title because it was before Mark’s new feature testing.
GregsConvergence4normal.param (22.3 KB)
Good luck!
Hi Mark,
I have done several more tests using the released v3.9.9 firmware and the Convergence continues to fly fine so I cannot understand all the in-flight issues I had with your builds. The plane would be flying fine and then all motors just stopped.
Cheers!
Hi Greg thank you will load these in and continue my learning process. Nice work here. Thanks for your help
Hi Greg,
Glad to hear the 3.9.9 release is working well.
Please post logs showing the motor stop issues with my branch. I’ve never had any similar problems with the Pixracer or mRo X2.1 controllers in my Convergence and mini-Convergence.
Have you tried flying master on the Matek Wing FC?
Hi Mark,
I think we’ve been through this already. See post #96 above.
Initially, I flew the first flights using a build from the “Latest” folder. I am not certain if this means Master.
Sorry, Greg. I misinterpreted post 106 to mean that my branch was working OK for you.
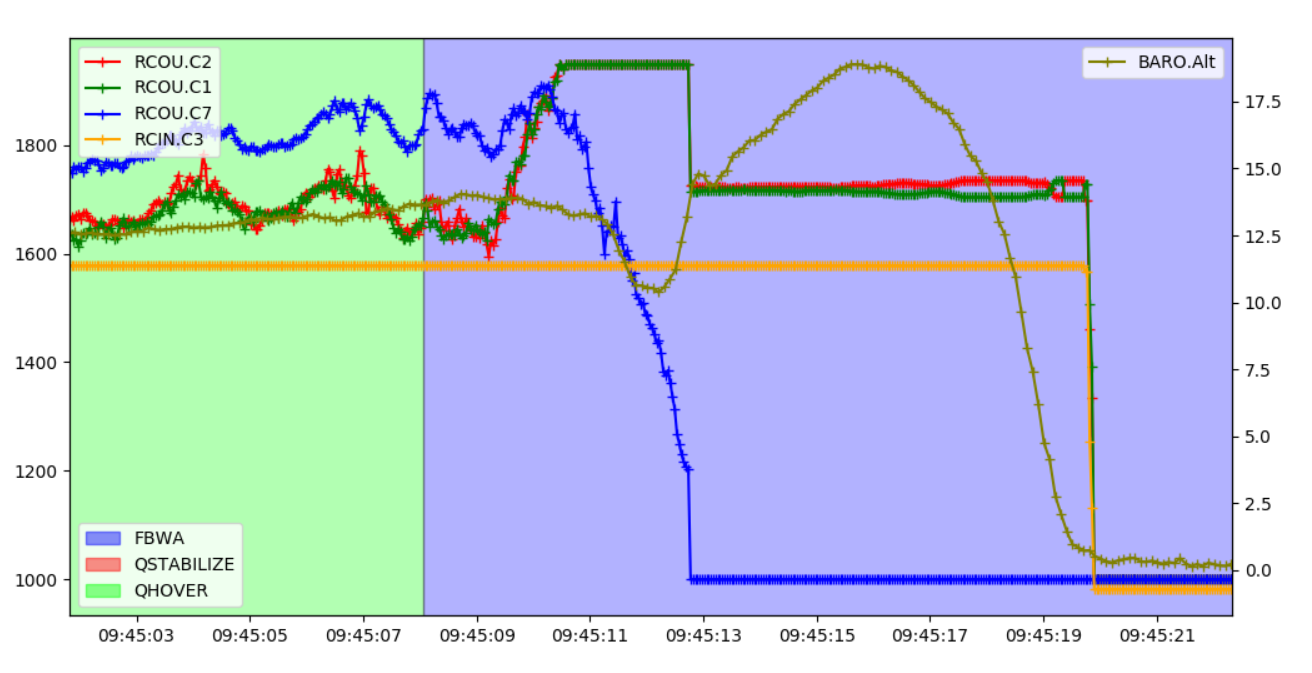
Your log 18 does show motor1 (channel 2) turning off on the transition from LOITER to QSTABILIZE, and that looks like a firmware bug. I’ll try again to reproduce this in SITL; my back-transitions have all been from FBWA to QHOVER with the real Convergence.
Log 18 was with the older version of the PR, and the code changed significantly in the latest version which you flew in log 19. I performed many transitions from loiter to qstabilize in SITL just now (with the latest version of the PR) with no problems.
But your log 19 appears to show a loss of altitude in FBWA (all the way to the ground) with throttle stick constant at about 50% and motor 1,2 PWM values constant at around 1720 usec. This would indicate that the problem was in the motor power system, not the firmware. Could it have been a bad connection for ESC power?
I haven’t made any changes or tested the connections since my initial assembly. The motors just seem to stop and the plane goes down. The only changes have been firmware.