The E-Flite Mini Convergence is a smaller version of the original Convergence VTOL. It came out about a year ago: RCG thread
Recently the PNP version has been on sale for only $80, so I bought one to serve as an ArduPilot tri-tiltrotor testbed.
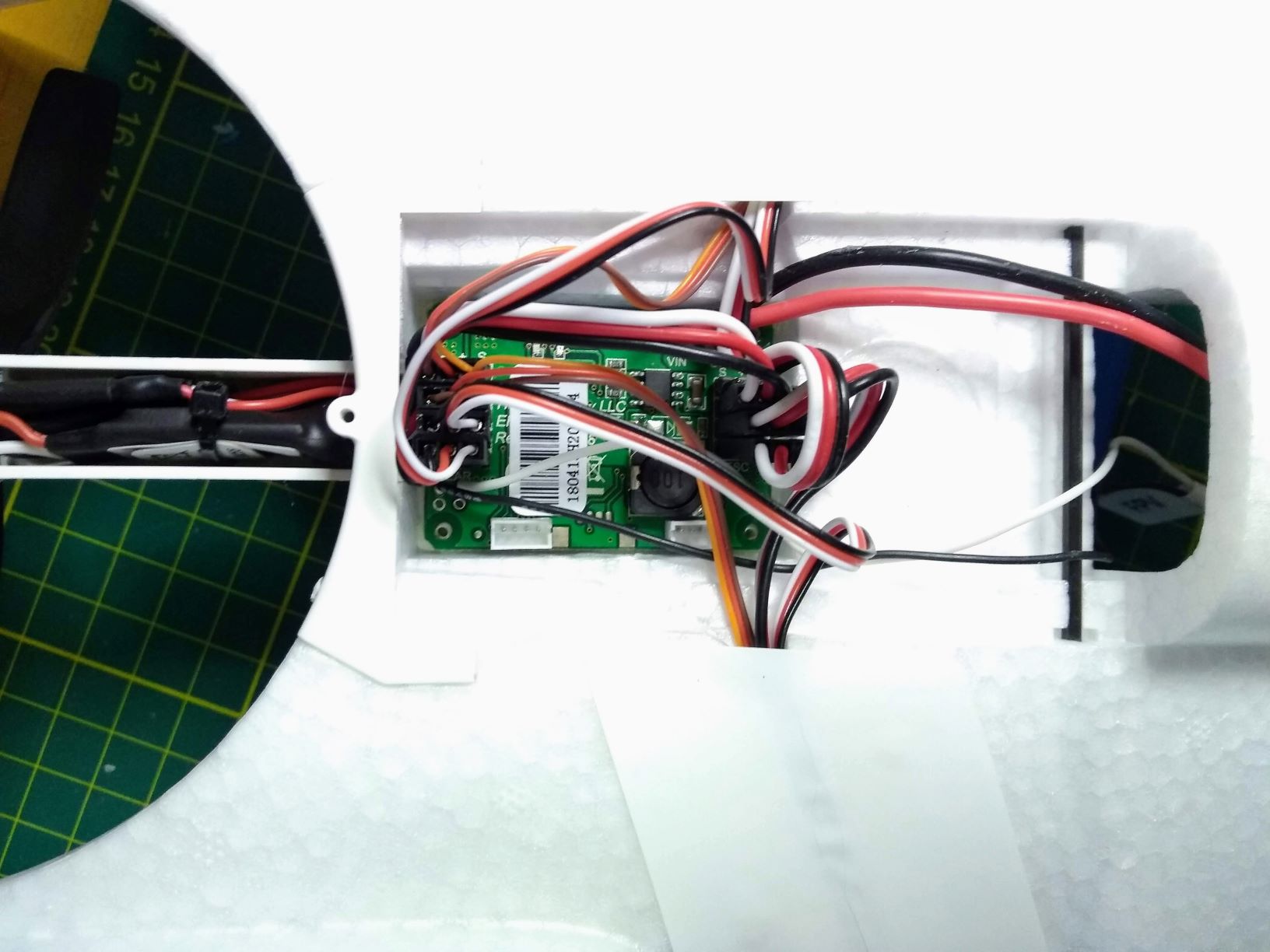
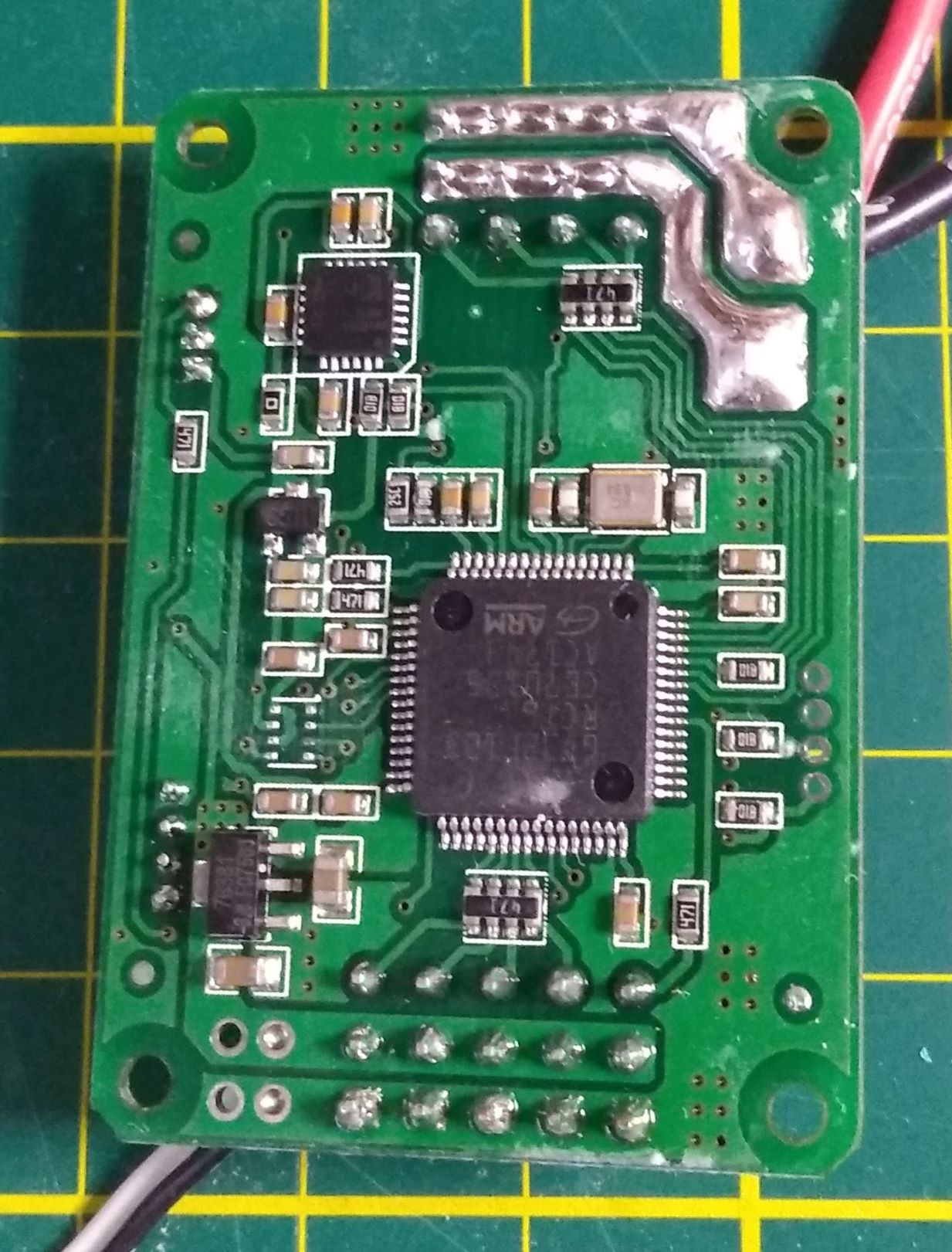
The stock flight controller (FC) is nicely integrated: it has a 5.25V regulator (EUP3484) rated at 3A which supplies the servo power rail and the 3.3V regulator for the MCU. The ESCs have only 3 wires; all motor current flows through the ESC power rails on the FC. ESC signal output is PWM at 400Hz, servo signals are 71Hz PWM. The FC PCB measures 32x46 mm and is hard mounted to the plastic frame which anchors the rear motor mount. Servos are Spektrum A360 3.7g (elevons) and A350 5g (tilt). The recommended battery is a 3S 800 mah 30C LiPo.
I chose to use the mRo X2.1 to replace the stock FC, since it is almost the same size (31x51 mm with vertical pins). I enlarged the opening in the foam to allow mounting the X2.1 with servo tape for vibration isolation, and cut a slot in the fuselage to provide access to the USB port and microSD card.
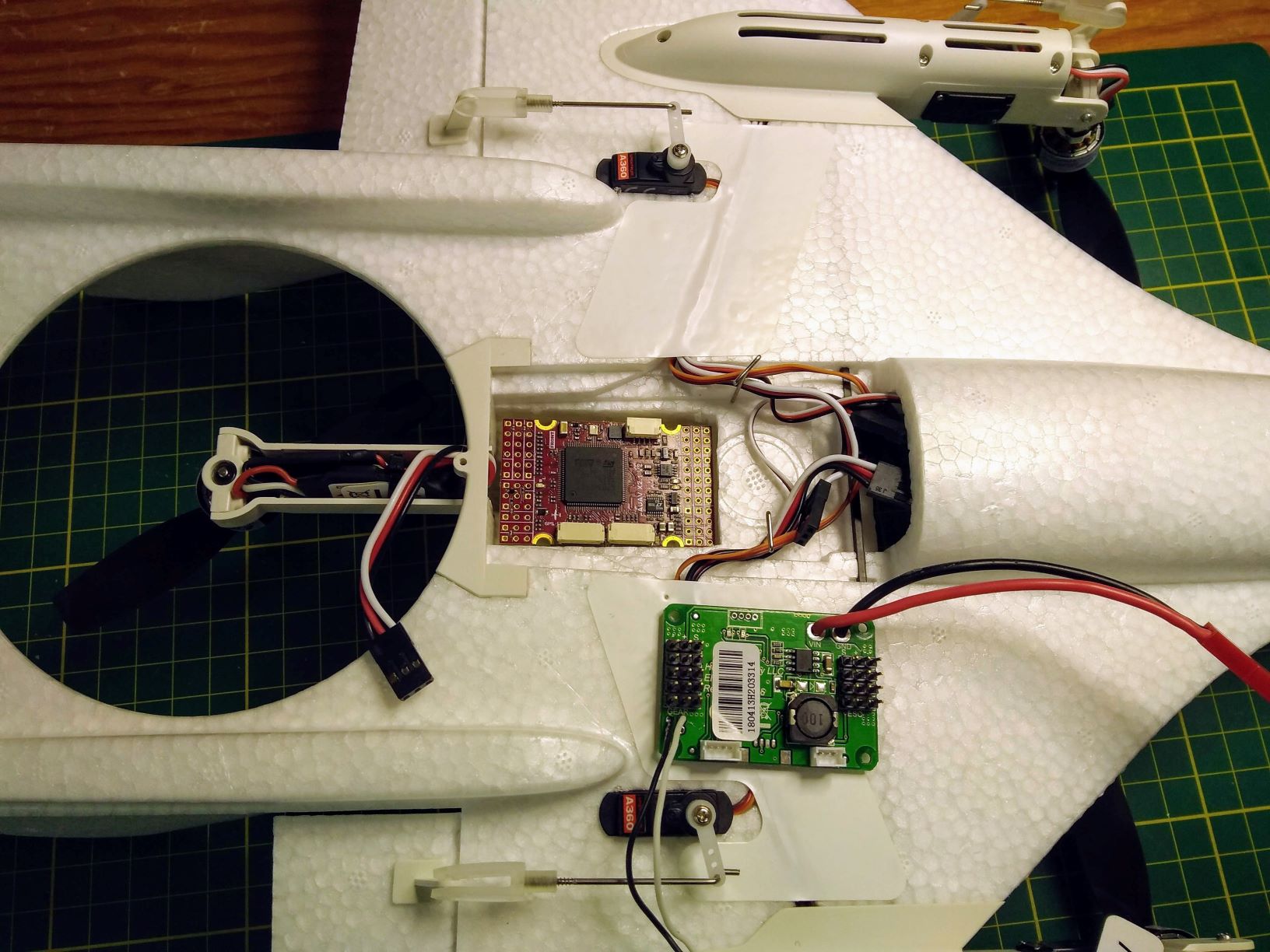
Since the X2.1 does not have an integrated BEC, I also installed an mRo ACSP7 power module and a 5V/2A BEC in the space provided for the stock RC receiver. An FrSky XSR receiver and the buzzer are mounted on the tail, and the Matek SAM-M8Q GPS is installed inside the canopy.
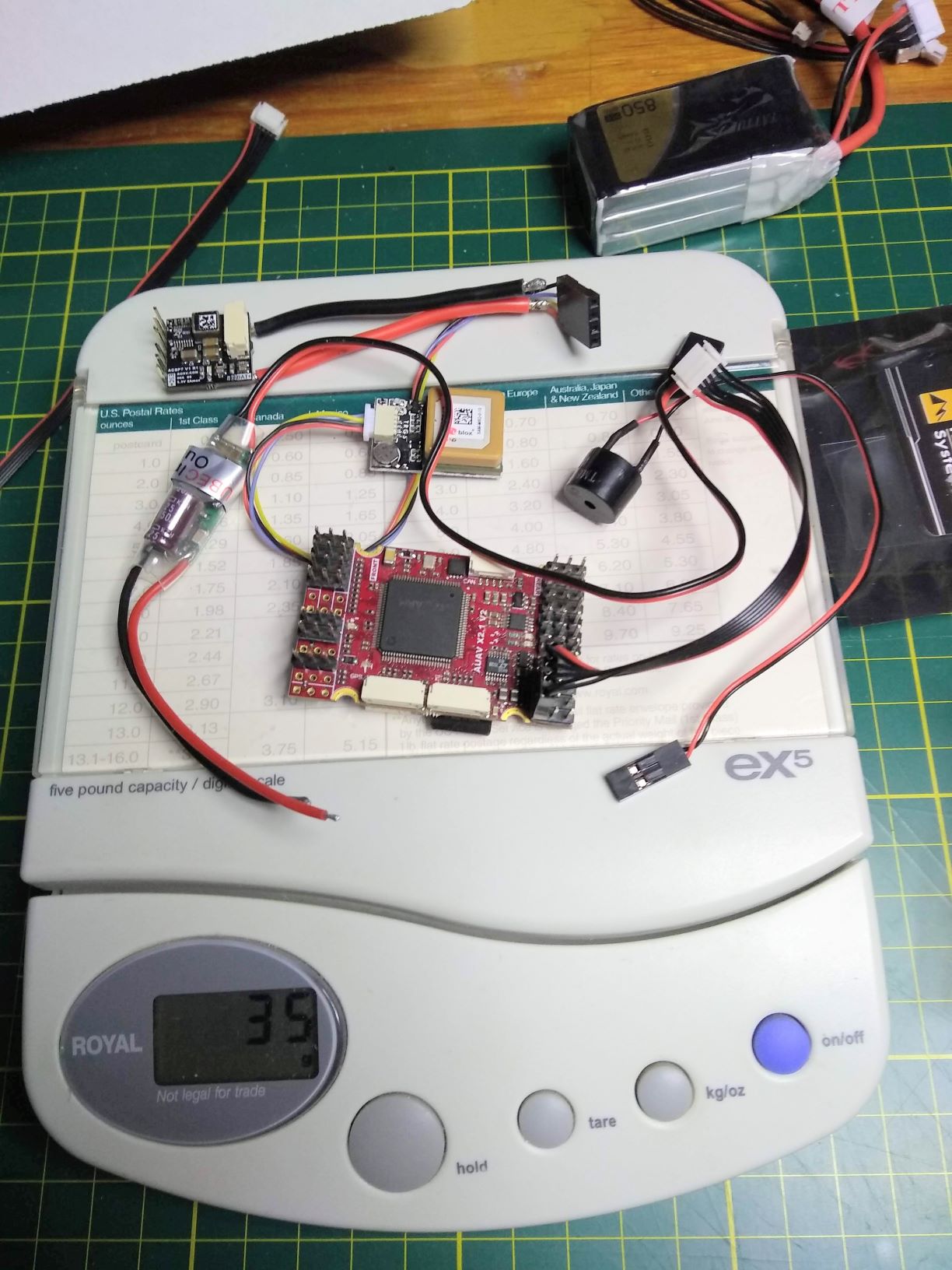
The X2.1, buzzer, ACSP7, GPS and cables weigh 31g and the stock FC weighs only 12g: weight will be increased by about 20g over stock.
The mini Convergence is flying well at a weight of about 300g with a Tattu 3S/850mah 75C battery (XT30 connectors) in both VTOL and FW modes.

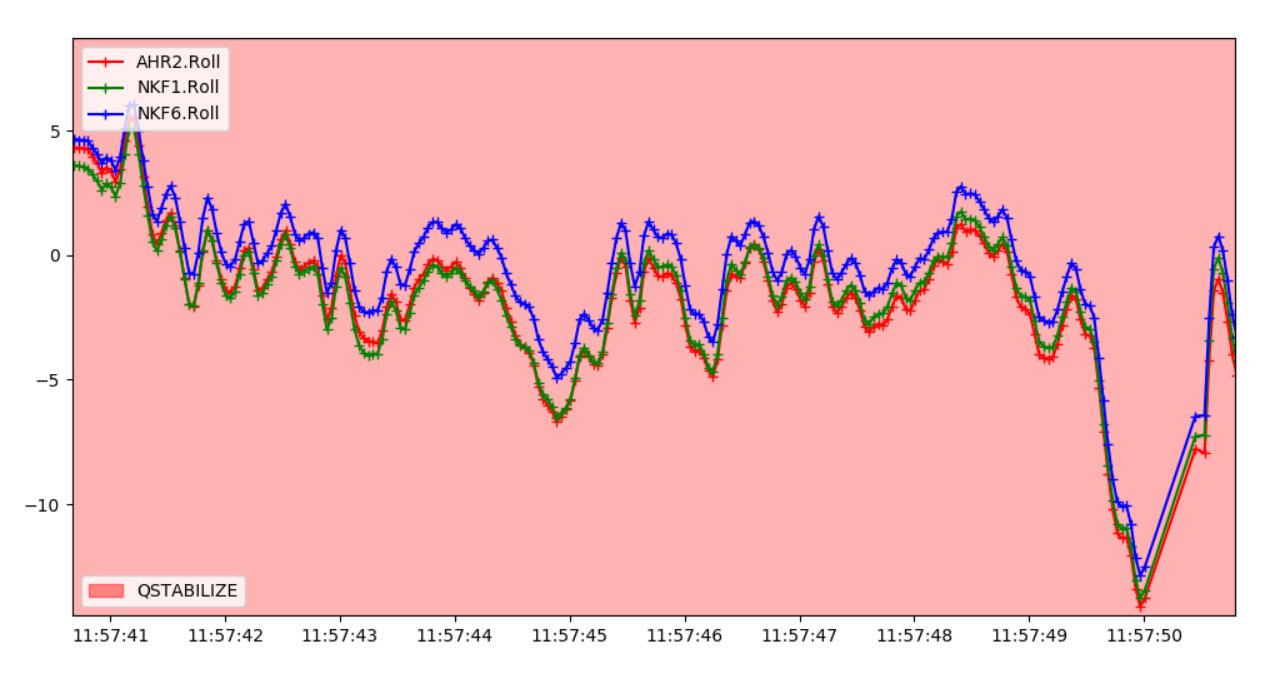
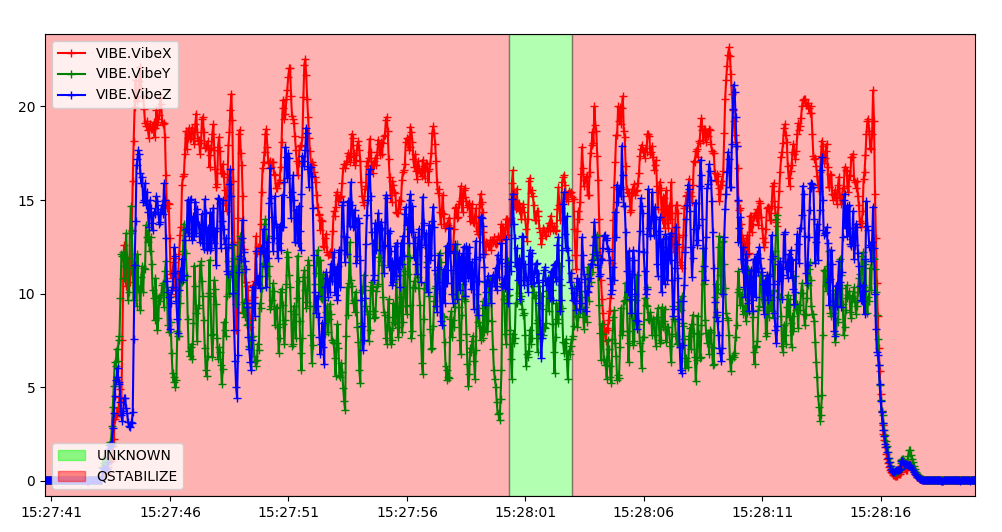
Vibration levels are about double those of the full size Convergence, but still acceptable:

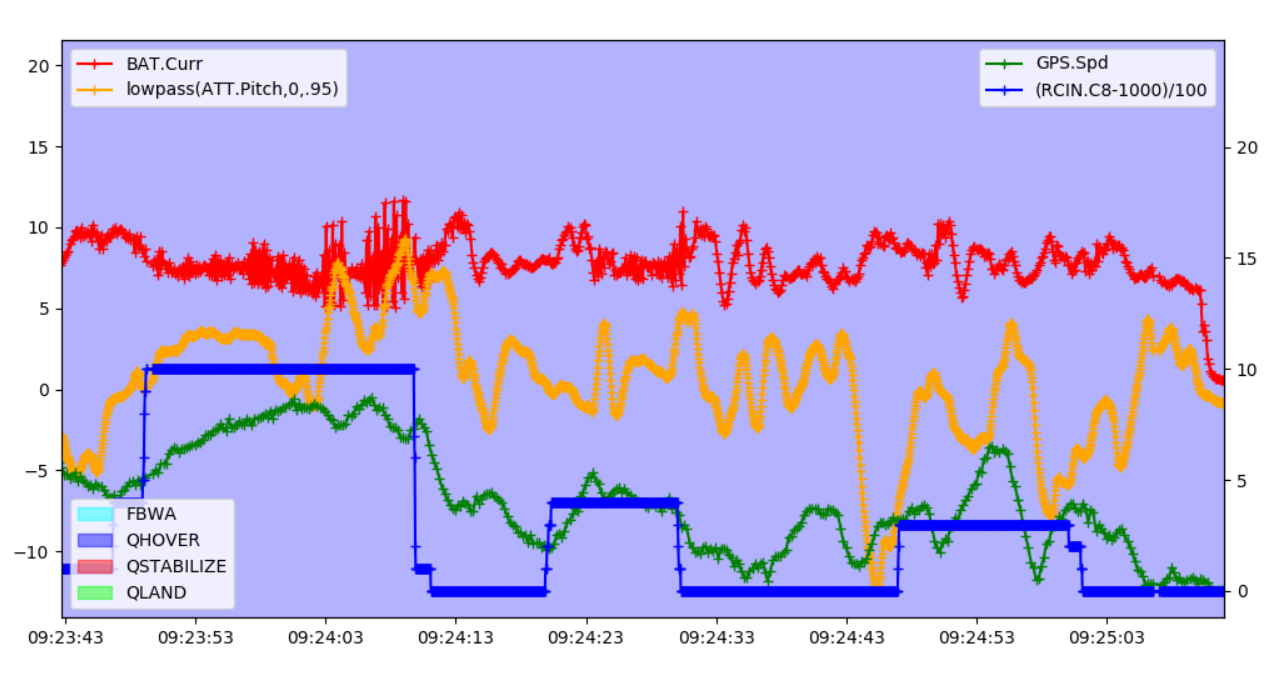
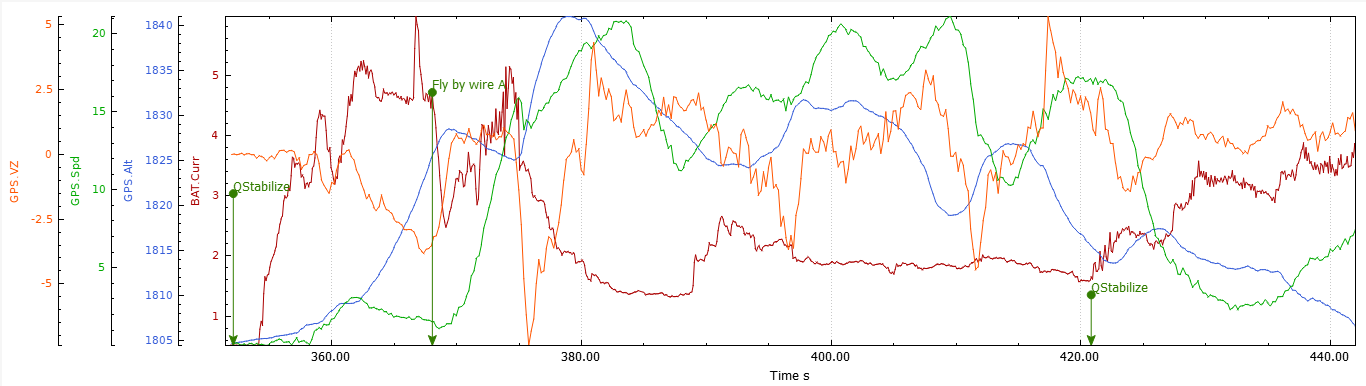
Forward and back transitions looked pretty good, with cruise speed in FW mode of about 20 m/sec and current draw less than half that for hovering. Hover is at about 43% throttle.
Plot of current and voltage in hover modes:
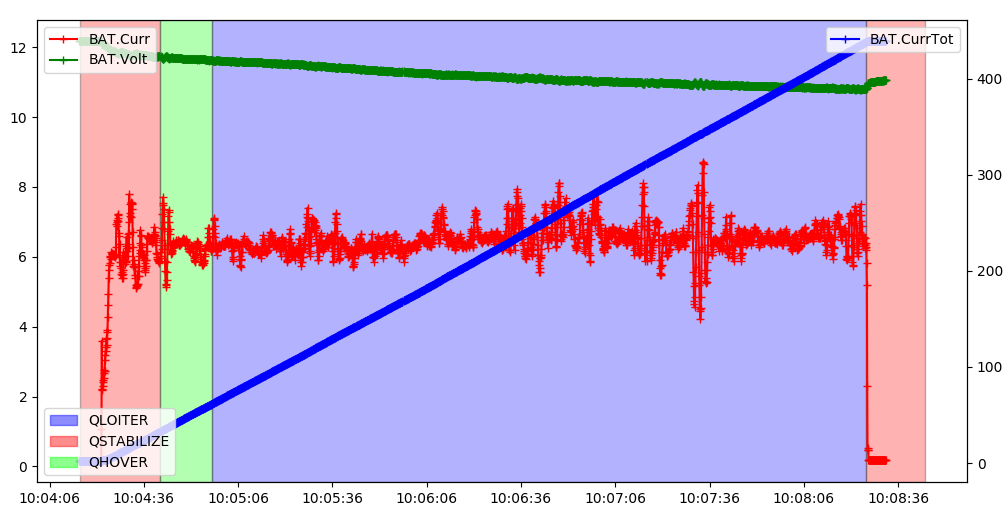
Extrapolated hover endurance (to 20% capacity) with 850mah battery is 6.3 minutes.
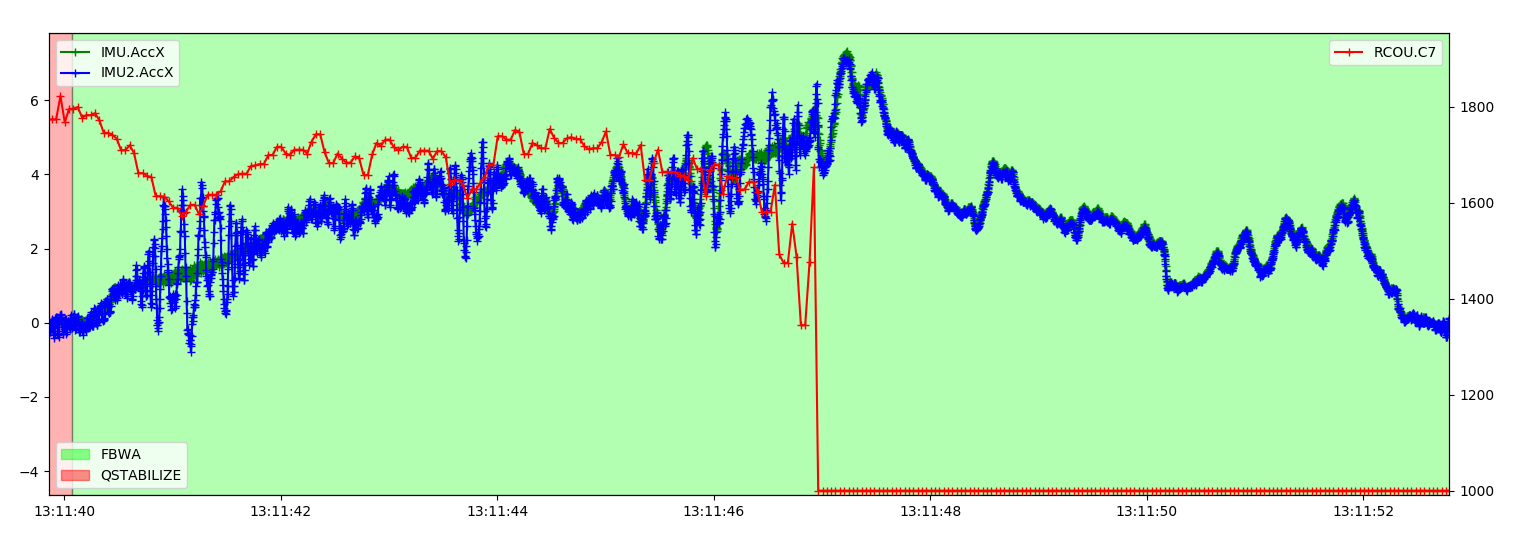
Log of QSTABILIZE/FBWA flight: