Many thanks. Will let you know how it goes. From your thread is there a best firmware and parameters file you recommend after your tests. As an Ardupilot beginner any advice would be greatly appreciated. I have uploaded firmware version 3.10.0 firmware version type DEV
Also parameters file dated 12/9/18 also from thread.
Greg’s parameters should be fine to start with. I haven’t done much tuning on mine, so Greg and Henry’s advice on PID parameters is probably best.
For initial testing the stable version of ArduPlane would be safest, but I’m not aware of any known tiltrotor issues with master or my branch with the added manual throttle channel.
Since you’re new to ArduPilot you’ll want to look at the wiki material for tips on setup and tuning. In case you haven’t read them yet:
The QuadPlane section is http://ardupilot.org/plane/docs/quadplane-support.html
and the tiltrotor subsection is http://ardupilot.org/plane/docs/guide-tilt-rotor.html
Thanks Greg for posting this. I am now building a Covergence with the Matek as you have inspired me to try. Have used Inav in the past for my projects so a steep learning curve expected.
Thanks Mark.
Yes i see i need to change firmware thanks for the links. The documentation is there but knowing what keyword to search for can be tricky as a beginner. had same issues with Inav until i figured my way around.
Hi all.
Am progressing a bit. Need some info please.
In qhover mode whilst ground testing props off etc My elevons still react to compensate and tilt rotors are @90 but aren’t changing. I thought the elevons shut down and tilt angle plus rotation speed of motors controlled hover. Have scanned through the wikis can anybody confirm for me please. I did have issues getting the parameters to to load being new etc and so am unsure so far. Sorry for long post
Here is my latest param file which should work fine for you if you are using the same servo connections with the Matek F405 Wing. It says “normal” in the title because it was before Mark’s new feature testing.
I have done several more tests using the released v3.9.9 firmware and the Convergence continues to fly fine so I cannot understand all the in-flight issues I had with your builds. The plane would be flying fine and then all motors just stopped.
Hi Greg,
Glad to hear the 3.9.9 release is working well.
Please post logs showing the motor stop issues with my branch. I’ve never had any similar problems with the Pixracer or mRo X2.1 controllers in my Convergence and mini-Convergence.
Have you tried flying master on the Matek Wing FC?
Sorry, Greg. I misinterpreted post 106 to mean that my branch was working OK for you.
Your log 18 does show motor1 (channel 2) turning off on the transition from LOITER to QSTABILIZE, and that looks like a firmware bug. I’ll try again to reproduce this in SITL; my back-transitions have all been from FBWA to QHOVER with the real Convergence.
Log 18 was with the older version of the PR, and the code changed significantly in the latest version which you flew in log 19. I performed many transitions from loiter to qstabilize in SITL just now (with the latest version of the PR) with no problems.
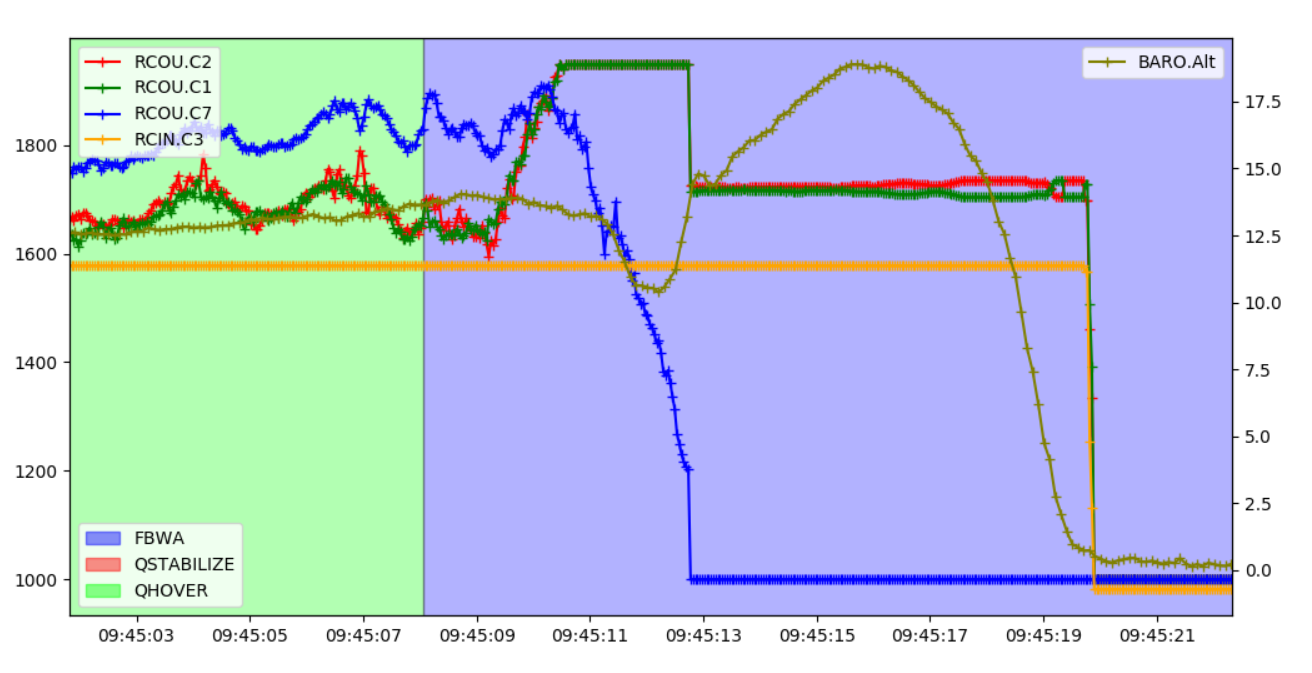
But your log 19 appears to show a loss of altitude in FBWA (all the way to the ground) with throttle stick constant at about 50% and motor 1,2 PWM values constant at around 1720 usec. This would indicate that the problem was in the motor power system, not the firmware. Could it have been a bad connection for ESC power?
I haven’t made any changes or tested the connections since my initial assembly. The motors just seem to stop and the plane goes down. The only changes have been firmware.
I don’t see how it could be a bad connection, given that the wires are soldered directly to the PDB. But it also doesn’t look like a firmware bug in log 19, since the motor PWM outputs don’t go to idle until the throttle input does.
I’ll continue flying my Convergences on the pr-man-fwd-thr branch to see if the problem shows up with the Pixracer or X2.1 controllers.
Little update Greg and Mark.
Have had a success with arming and have 6 modes programmed on Taranis using logical switches and a 2 switch combo with speech etc. All is working as I think it should although I have a compass variance warning under battery power with motor running so will check out further recalibrate move gps/compass. Getting real close now for maiden. Greg your parameters are in and I think it’s going to work.
Thanks both once again.
PS it’s a BN-880 GPS Mag combo if any body has a tip for me it’s oriented to the top of frame gps ceramic pointing skyward wires facing back I think I had the compass orientation at pitch 90 this gave correctly heading with no errors initially maybe I will have to go through each one until I get correct function. But nearly there sorry long post again😁
Check the compass directions on the HUD in Mission Planner. I also only use the one external compass.
Many times indoors you will get the “compass variance” warning or even outdoors if you move around with the plane. It should go away if all is well…especially if you walk the plane forward.
Thanks Greg.
Have got that sorted I think to the point of a test hover.
I got the feeling that the model was going to flip right to left from my race quad experience.
Ripped of the props etc although I am using your set up I believe I have gone adrift.
I used the servo screen to monitor the motors.
I believe motors 1and 2 are sensing backwards eg if I lift right wing so motor 1. The motor was speeding up. I have ticked the servo reverse on motors one and two. Although I don’t know as the green bars still travel in the same way. My artificial horizon is correct. The only other thing would be to plug motor 1 into motor 2 socket.
Your thoughts on this and corrections if I am wrong. Sorry to be a pain.
Thanks.
Dave
Interesting, we didn’t change the motor directions or any of the connections between the ESCs and motors. With the props off, double check the motor directions with the photos above and original E-flite setup. Then dip each corner and listen for the motor to speed up. Finally, use the right stick to move away from the motor that should speed up. I can’t remember what your transmitter was but here is my Taranis setup…just in case.
Greg Little update.
tried exploring datflash logs but its too different from betaflight blackbox explorer, i could not find a motor output graph etc sure its there if you know how… So i swapped motors 1 and 2 fortunatley i re used the original esc wires so could just replug.
Anyway im my living room was able to get her very very light and i feel this issue is solved for me, My Old EYES are playing me up no doubt!!! also the appropriate inputs were lifting on model. The weather here this Summer in the UK has been horrendous and today is no good so cant test further.
PS what mode will bring the tilt rotors to full plane mode so that i can check linkages or adjust servo trim when in fbwa or cruise props off the motor angle is not full plane mode am gussing its because model knows its stationary.
cant think of any other stuff thats worrying me before maiden.
ppps this model has never flown sucessfully on horizon F|C my friend bought it when they were first introduced and it was horrendous it has been glued together that many times he gave up so luckily i was able to get it cheap for this interesting project, I think its going to be good.
Thanks once again hope you dont mind me updating here on my progress
Dave