here is the zip file:
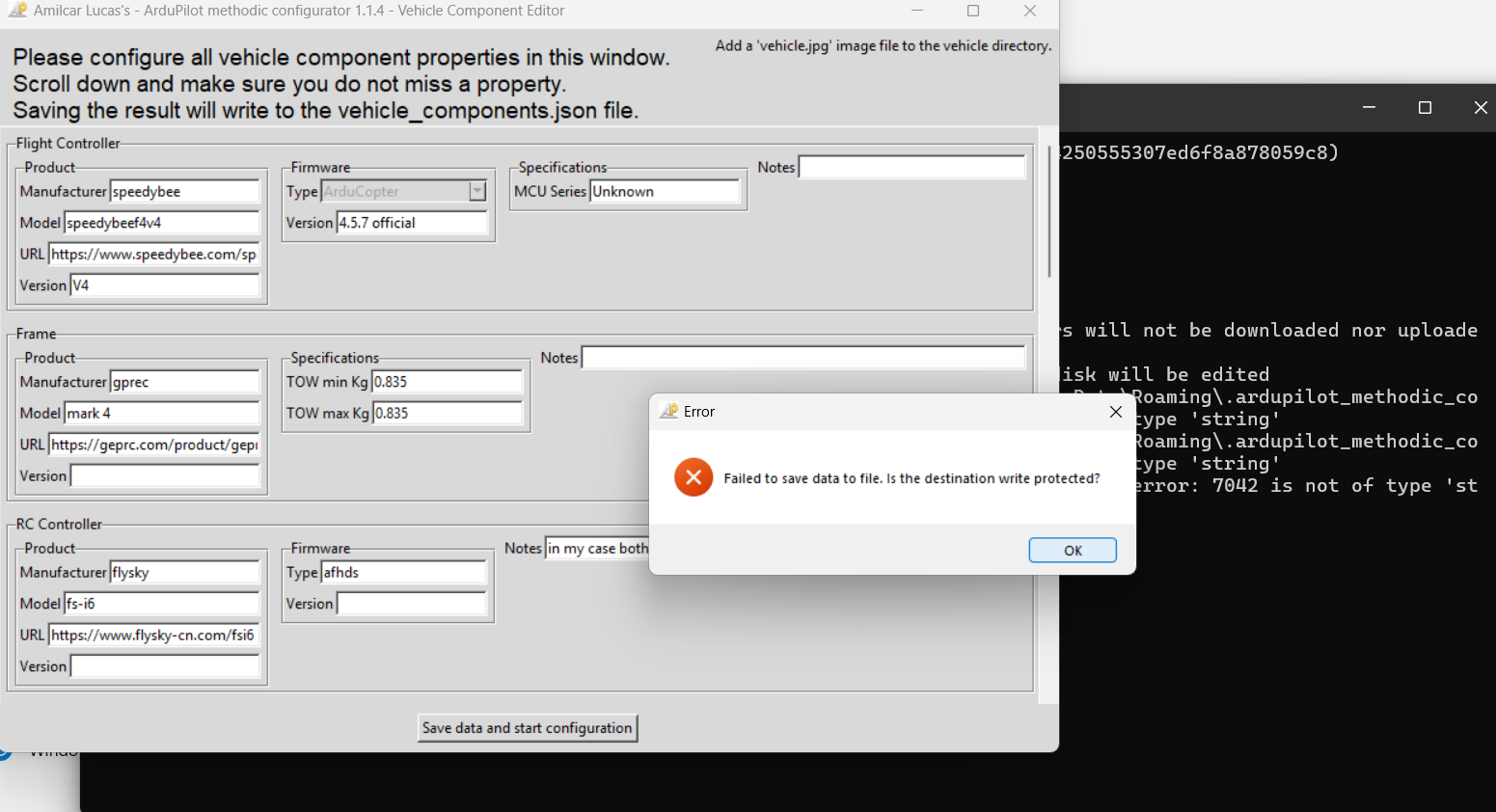
and by the way the write protection error still exists in 1.1.4
here is the zip file:
and by the way the write protection error still exists in 1.1.4
lets review this craft that uses the default tuning https://www.youtube.com/watch?v=Jzlo4Ho939o
or this one. https://www.youtube.com/watch?v=J__VqADA4aI
Video from 2016.
hi iam fairly new to this field can you provide a reference of how a perfect graph would look like.
videos are private can you make them public
Yes. The point is you can get a very nice flight with the default tuning in the video below. However if you have a bad flight you can tune it. Speaking of tuning possibly you could have a remote tune.

It looks like your 2nd one I posted above where, thanks to The Methodic Configurator in this case, you properly configured the Vertical Acceleration Controller gains.
@Quadzilla I and a couple of other developers that are knowledgeable in control theory are of the opinion that a couple of your vehicles work okeyish with no tuning at all. We believe you, no need to post videos or argue. That is a product of your good design and building techniques. This is your achievement on your vehicles caused by your knowledge and experience…
Other users in this forum lack your expertise,they do not build correctly, they do not use stiff frames and use poor quality components. So they will not be as lucky as you. Default parameters will not work for them. Stop encouraging beginners to use default parameters. You are not helping them, you are just making vehicles crash and proving that you are a better builder than them. They do not need that. They need help, and constructive opinions.
The reality is the user needed to fix a bad vibration and i showed him how now he can use your program. However you have no right to judge others quality like okeyish. BTW I do tune even in Realflight and I will continue to show videos as they inspire new users. Dave have helped a ton but Dave assessment is wrong if he like to publish a paper I would look at it.
Please do continue to post videos, please do post your cool designs and you cool frame colors. We all like it. They are great.
Just do not recommend users to skip tuning. That is not a good practice.
“Just do not recommend users to skip tuning. That is not a good practice.”
re read the post I am on your side.
What side would that be? This?
All that was initially required after setting the Initial Tune Paramaters were these to eliminate the output oscillation so proper tuning could commence:
ATC_RAT_PIT_D (same for Roll)
ATC_RAT_PIT_I (same for Roll)
ATC_RAT_PIT_P (same for Roll)
PSC_ACCZ_I
PSC_ACCZ_P
This isn’t my idea, it’s right out of the Tuning Wiki. It’s also the same parameters that @amilcarlucas Methodic Configurator address’s among others.
It’s the reason for the before (massive outputs oscillation) and after (no outputs oscillation) that is seen in the post above.
The logs used for this are still posted, anyone can confirm.
Hey I sorry your having issues, if you like i can help you make a 7" quad as seen in the video.
I don’t have any issues. The poster had plenty. The worst of which you can see in the 1st reply. I wasn’t guessing. I graphed the log, reviewed the pertinent metrics and gave a reply that accurately described the problem and the reason for it.
I have to admit the oscillation is a odd issue. I get oscillations one out of 20 builds. I just use the twitch slider and it’s fine. Also I’m able to have a setting for hyperflight" light twitch" for flying next to trees or a non hyperflight for open spaces. The 7" video I showed can fly my very tight property using waypoints go around a tree like a pro.Obviously am am satisfied with the results.
@bhargava_ram_alla I looked at the files you posted and fixed the save issue.
Please update to v1.1.4 or to the development build and use the following fixed files:
mark4build.zip (176.7 KB)
When configuring the vehicle you must always skip step 16 with this particular template!
Redo steps 11 and 14. After that continue normally on step 19.
thanks @amilcarlucas i will use the fixed files but the latest version of methodic configurator has the same error.
You need to use the development build, not the latest stable.
Those are two different versions.
And on the background window looks to me as you did not loaded the files from the .zip file I sent you.
i downloaded the dev build now it is working smoothly
that file is just for testing whether the bug persists or not. And on a pleasent day with little wind i am planning to auto tune the quad is this worth it? currently my quad is flying great(from my point of view there are no vibrations i dont know what is really going on inside ![]() the desired roll,pitch and yaw are matching with existing one this is the only thing i observed) .
the desired roll,pitch and yaw are matching with existing one this is the only thing i observed) .
You now have the tool to correctly configure it.
So do it, no excuses.
Finish the standard tuning phase. And then report here how amazed you are at the achieved results.