when i arm the drone and increase the throttle the drone start to vibrate but still it flys but with vibrations and when i reach to a certain altitude i changed mode from stabilize to altitude hold mode then it descends downwards, i checked the condition of the props they are brand new and here is the drone param list and my flight data:
flightdata
params
drone info:
flightcontroller and esc stack :speedybee f405 v4
drone frame:mark 4 7inch
motors:1300kv emax eco2
battery:4s 3300mah llipo
Drone is continuosly vibrating in flight and when i change to alt hold mode the drone is coming down
A 7" is not going to fly on default parameters.
Here are a couple resources to use to tune it properly:
Methodic Configurator
7" build Don’t copy the parameters file this is just for reference.
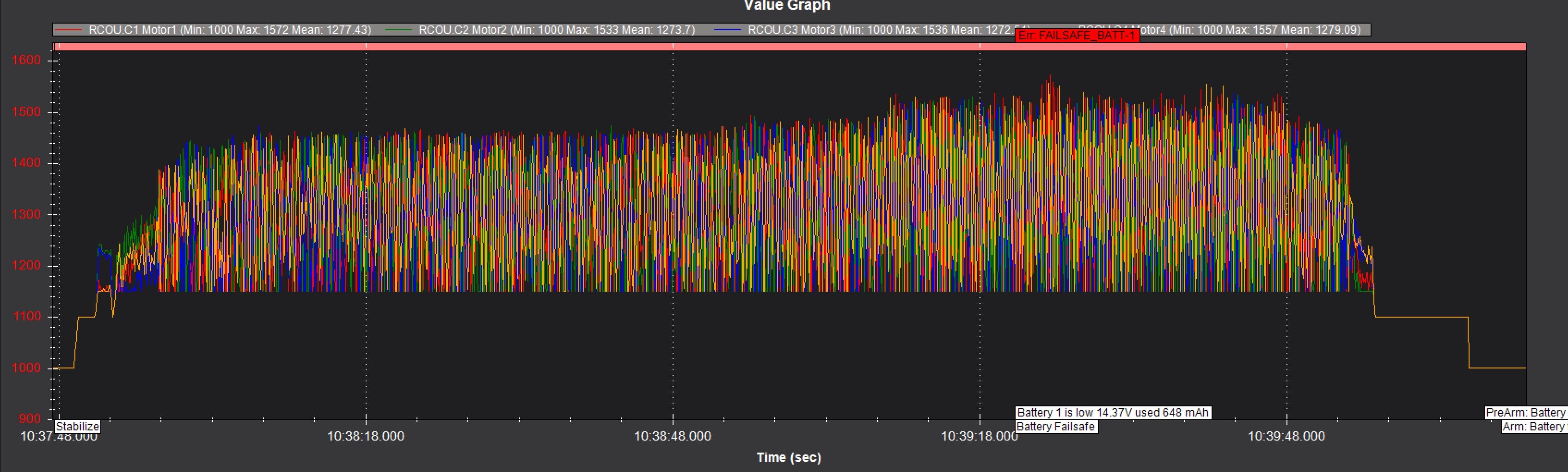
If you want to look at a metric that is indicative of the problem here you go:

The infamous Output Oscillation.
1 Like
I willing to wager a bet that this is not true. Could be we can say something that “some people will have a hard time” or some flight controllers?
The infamous Output Oscillation bug. Seems to have come back. Probably best to update firmware,
take 2 min to look at this video i made. Could help you before you tune. https://www.youtube.com/watch?v=2YzIqk1vcG4
1 Like
thank you for the reply i will try to tune it
thank you for the reply i will try the video

Where can I find more info about this bug?
this one solves the vibrations but still when i use the alt hold the drone loosing altitude
Try flying it a few. it should acclimate over a few flights or use Loiter flight mode.
I think this could have something to do with the GPS but above my pay grade.
There is no bug, this is simple tuning.
1 Like
@dkemxr already explained how to fix it.
This will do nothing to change the parameters required for this problem.
1 Like
“this one solves the vibrations but still when i use the alt hold the drone loosing altitude”
Post a link to that log, let’s see.
- set TCAL_ENABLED to 2 (to learn and use calibration)
- power down the board and let it cool for a few minutes
- power on the board and leave it for about 10 minutes
- learning will happen as the board heats up and while it is not moving
- the TCAL_BARO_EXP should be updated with a non-zero value
- optionally turn off learning by setting TCAL_ENABLED to 1 (to use but not learn new calibration values)
- My advice is to fly it a few times. This seems to help me.
These problems are more complex, the solution posted by @dkemxr in the second post fixes them all, and fixes some that you yet do not know that you have.
1 Like
Come fly the friendly sky’s. Yea I still giving you the tip of the hat. I said before you tune.
Video from 2016.
Whatever changes you made did nothing to address the problem. You have output oscillation. It’s not a bug, it’s tuning. Anyone that can graph a log of the RCouputs can see this. Certainly a Developer can see this.
Bugs, GPS problem, IMU temperature calibration; none of this is relevant to the issue at hand which is basic.
Here it is (again in the new log):
I could give you several Parameters to change to fix this problem, that’s how basic it is. But, at your level of knowledge you should follow the Methodic Configurator.
1 Like