I said before you tune.
Drone is continuosly vibrating in flight and when i change to alt hold mode the drone is coming down
hey the vibration are gone for the drone so i thought it is solved now i understand i need to use methodic configurator
Here is a pdf explaining it. It is as simple as it gets. But you do need to follow the steps and learn a thing or two.
Pay special attention to section 7.1 ![]()
1 Like
Sounds good let’s see them. Loving basic.
Consider the barometer… Specifically, how does it operate under varying temperatures?
update: i tried arduipilot methodic configurator but it is very complex for me so i entirely formatted the fc and reinstalled the ardupilot again so now i used chimera 7 configuration values and changed them a bit(pid values) now the drone is vibrating again and oscillations continue here are my log and parameter files:
https://drive.google.com/drive/folders/1vOyseiYgFh7k9xexW0ZFkjmomjd2QzMT?usp=sharing
@bhargava_ram_alla What exactly is complex about the arduipilot methodic configurator?
- Did you enter your vehicle component information? What was complex about that?
- Did you enter your FC<->components connection information? What was complex about that?
- Did you read the step-by-step guide as it guides you though the parameter changes? What was complex about that?
I want to understand where you found complexity problems.
-
so first thing i am confused is why is the reason asked(is there any generative ai model impl so that model can understand what we trying to interpret)
-
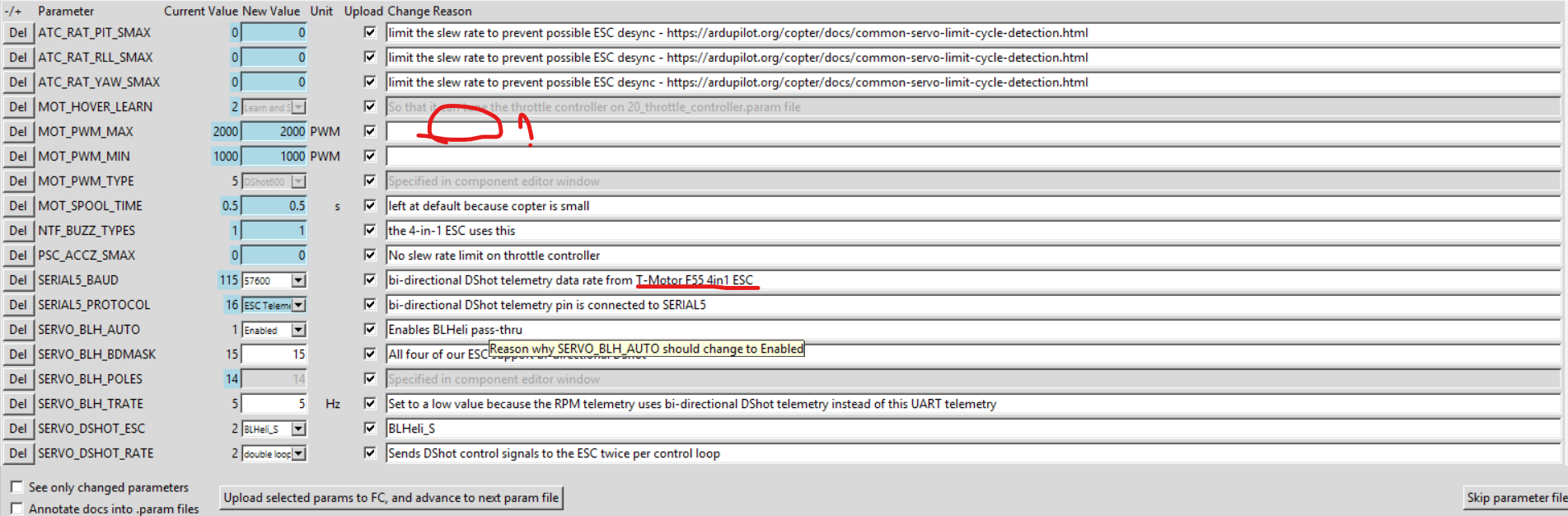
the next thing is i already given my entire parts description in the first step but still it is going with default one eg: During the begining phase i mentioned my esc as speedybee 60a esc but when i go further in the process of tuning it is showing me tmotor f55
-
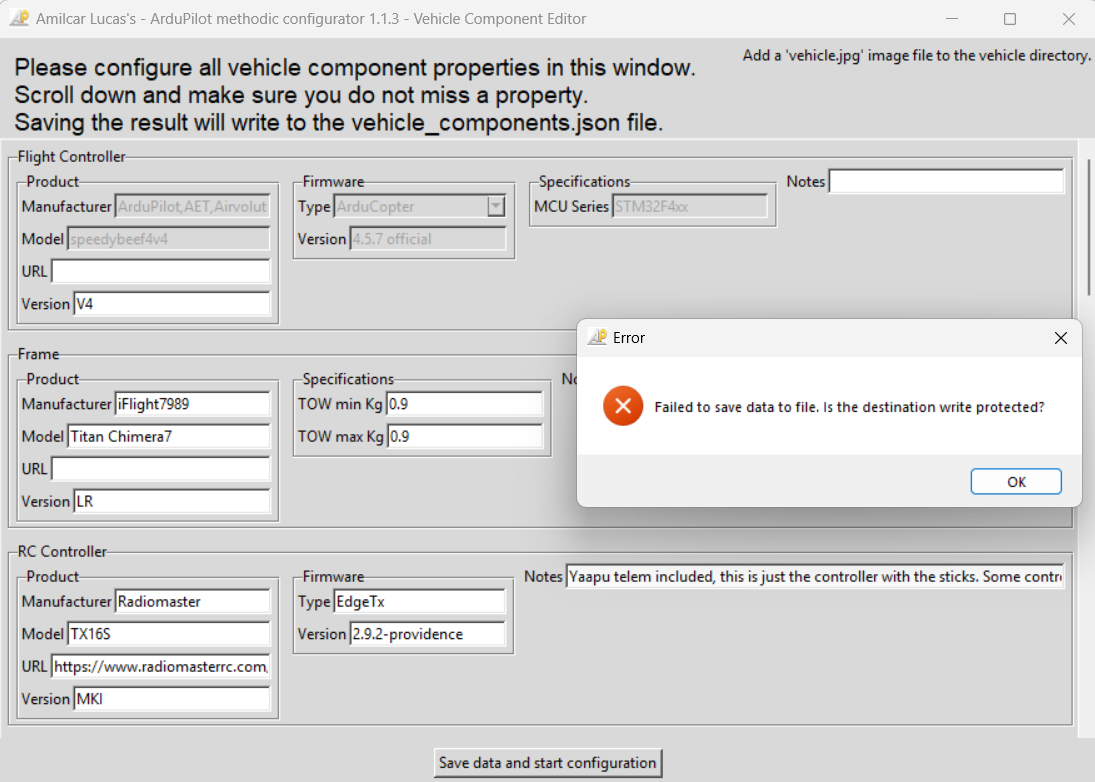
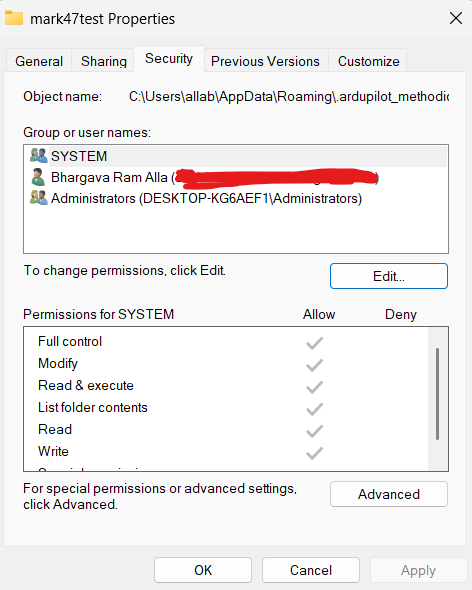
I think it is not saving the parts list i am getting write protection error(i even tried using administrative mode)here is the image of the error
Thanks for your input, it helps me improve the software, so that more people can be helped by it.
- From the README.md documentation:
The Reason changed field is extremely important because:
- if forces you to think, causing rational decisions instead of impulsive ones
- justifies your decisions on a vehicle certification process required in most countries
- allows for someone else to see if you know what you are doing
- allows for someone else (or yourself after a few weeks) to understand your rationale
- in the future an AI can use this to validate your configuration
-
That is from the original vehicle template, you need to edit those fields. Those are just guidelines/examples of what/how to fill in the values. You still need to fill them yourself, unless they are greyed out. Greyed out field are automatically filled in and you do not need to change them.
Like explained in the popup: you need to edit ALL New values and their change reason to meet your vehicle -
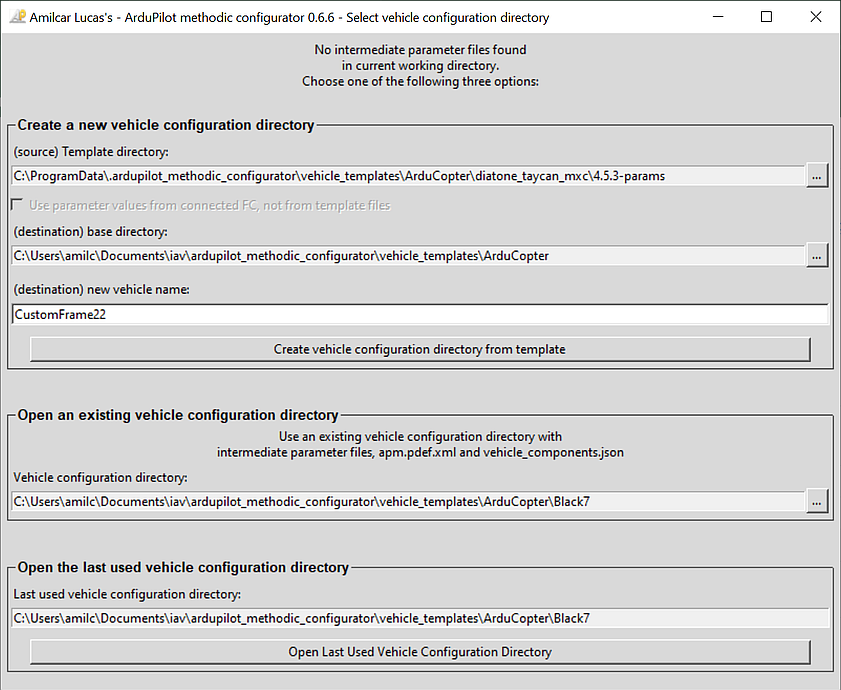
Post a picture of the vehicle selection window. I want to see the name of the vehicle directory you gave, and it’s file path. The file path needs to be writeable.

There is already an AI chatbot that can answer most ArduPilot questions, it’s on the ArduPilot methodic configurator website lower right corner. But it is better if you post your questions here.
-
got it
-
here is the window image

- the folder also has write permission i checked in linux too same problem
Thanks for your questions, I now improved the change reason mouse-over tooltip:

And I think you found a regression bug with the vehicle directory, I fixed that and did a development build that you can test.
1 Like
I fixed the fail to save data regression. Please update to v1.1.4
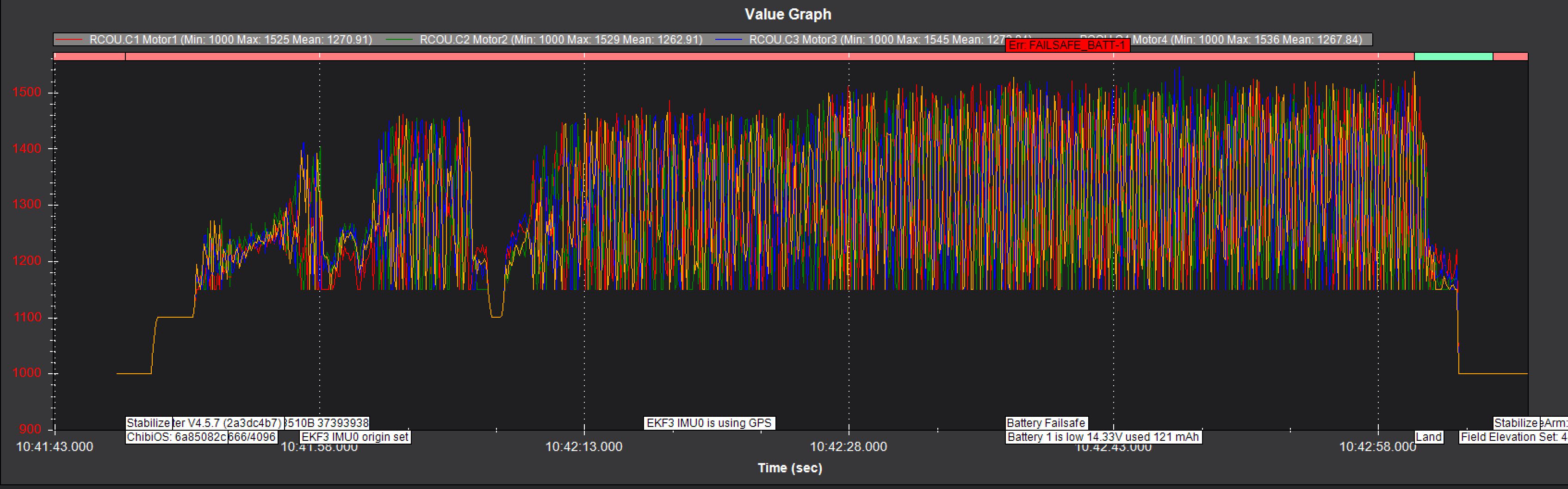
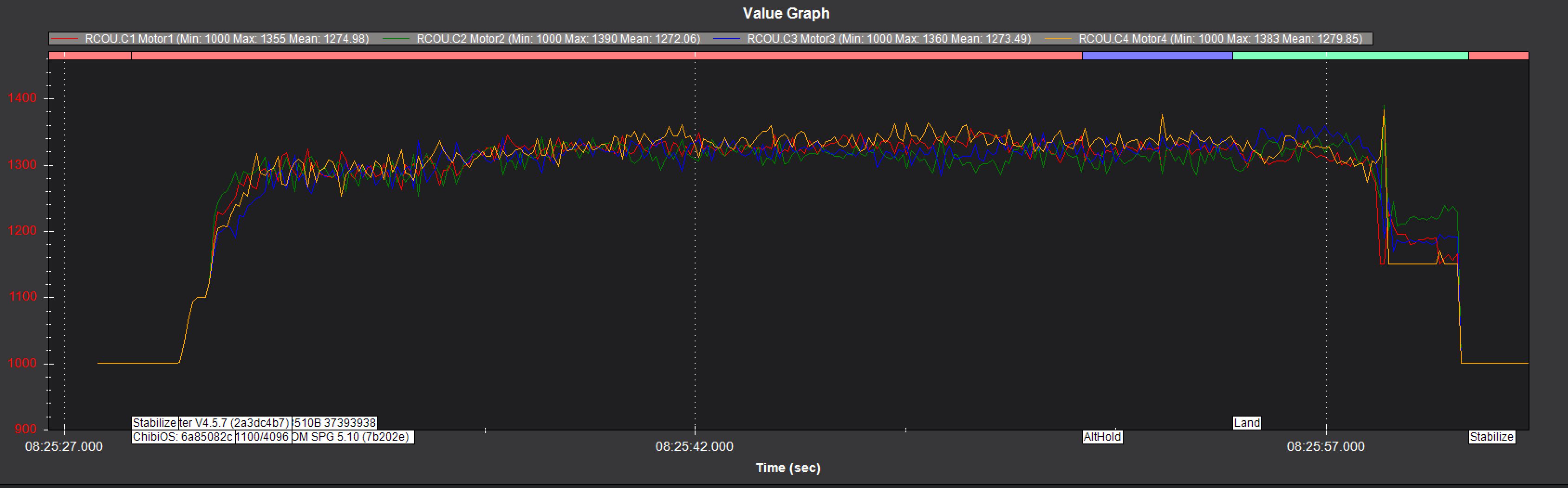
hi @amilcarlucas so today i degraded to methodic configurator version 1.0.15 in this version the save feature is working and i am able to successfully tuned the quad, when i tested my drone for a flight there are no vibrations now and also i examined the rcou graph the oscillations are less compared to the previous days flight data but still i dont know whether these oscillations are normal or not, i will attach my log file. The only thing that is not working is when i change from stabilize to althold the drone alt is descending and eventually lands.
Update to ArduPilot Methodic Configurator 1.1.4 and fix your notch filter settings. That BW is way too high and you have too many notches.
Post a .zip file with the files generated by the configurator.
That’s because your hover throttle is really ~.120 (or maybe less) and you have it set to .200
1 Like
I guess he did not do step 20 yet.
1 Like
is this the file you are asking for:
so the oscillations problem still exists?
ok
Have you balanced propellers? Do your engines vibrate when unloaded or loaded? Vibrations are fundamentally a matter of physics, not software.
Again, check baro.
No, I want a .zip file with the contents of the vehicle configuration directory created by ArduPilot Methodic configurator. I want to see the reason why you changed each parameter the way you did it. I want to see the URLs of the components you used so that I can find their specifications ![]()
@Paul_Paku If the vibrations are PID induced it is solvable in software. This is an exception I know!