Yes, use some reference surfaces for the positions (table and a wall, floor and wall, whatever). And then when it’s complete run Calibrate Level and make sure its level in Mission Planner’s HUD.
I doubt you are anywhere near ready to run Auto Tune. Complete the process here: The Configurator
Dave, did the accelerometer calibration again, and test flight was 100% better I could POS HOLD almost rock solid. Question. On the MOT_HOVER_LEARN parameter, How long should you fly to collect good data? Or can you keep it on always? Does it now sound to you that I am ready for the autotune flight?
Also, I have 15 inch props and the distance between motor centers is about 18”
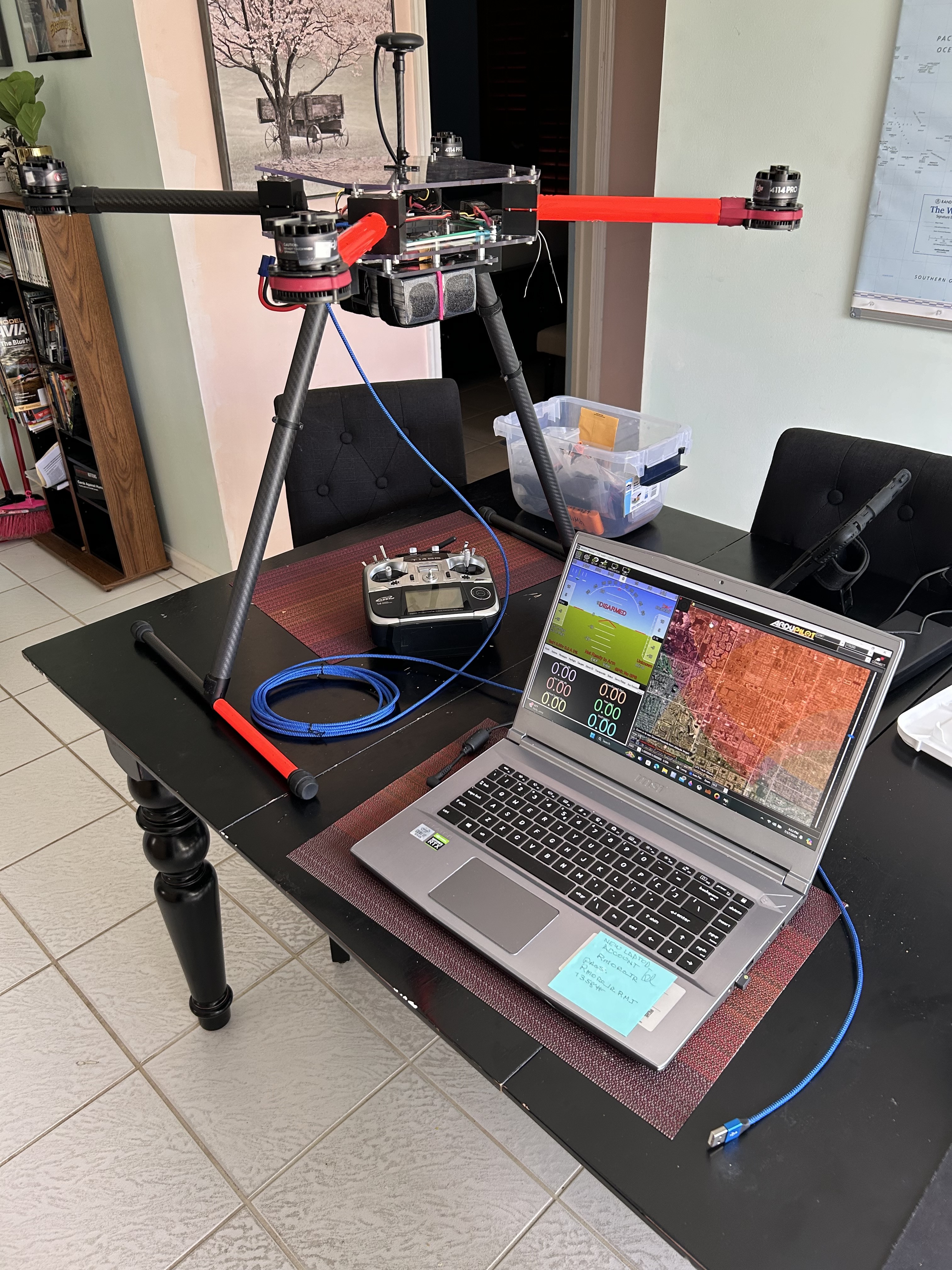
Remember these are power arms from a DJI S900 SPREADING WINGS bird.
Will the ALT A function in MP work for all versions of MP ?
Rick-You can leave it on. The only good reason to disable it is if the Hover value is below .125, doubt that’s the case for you.
Vibe levels good?
Have you configured the notch filter?
Performed Magfit?
Checked outputs for oscillation?
All pre-requisites before running Auto Tune.
Thank you for the action list. I appreciate your time and help.
I read somewhere that autotune can worsen controls. Not sure what to make of that, it I think that I should leave well enough alone. I will perform the suggested steps. But again when I placed it into Position Hold,about 30 ft high,
It was Rock Solid in the sky, hands off on controls for a good 15 seconds. Solid. Should I still do AutoTune?
I know I’m not completely there yet, I feel that for a 70 yr old Veteran, who worked in electronics in the 70’s and 80’s, I’ve done pretty good with this auto pilot system. I need to slow down and take these last steps
Extra slow, any missed parameter at this point can cause irreparable damage at the end…
Again, I totally appreciate your taking the time to help an old man……
It can if the craft is not at a tune state suitable for auto tune. A message of “failure to level” is the usual hint that it’s not configured for successful auto tune.
If you want to post a link to a .bin flight log of a short flight with hovering and a bit of pitch and roll we can see what needs to be done.
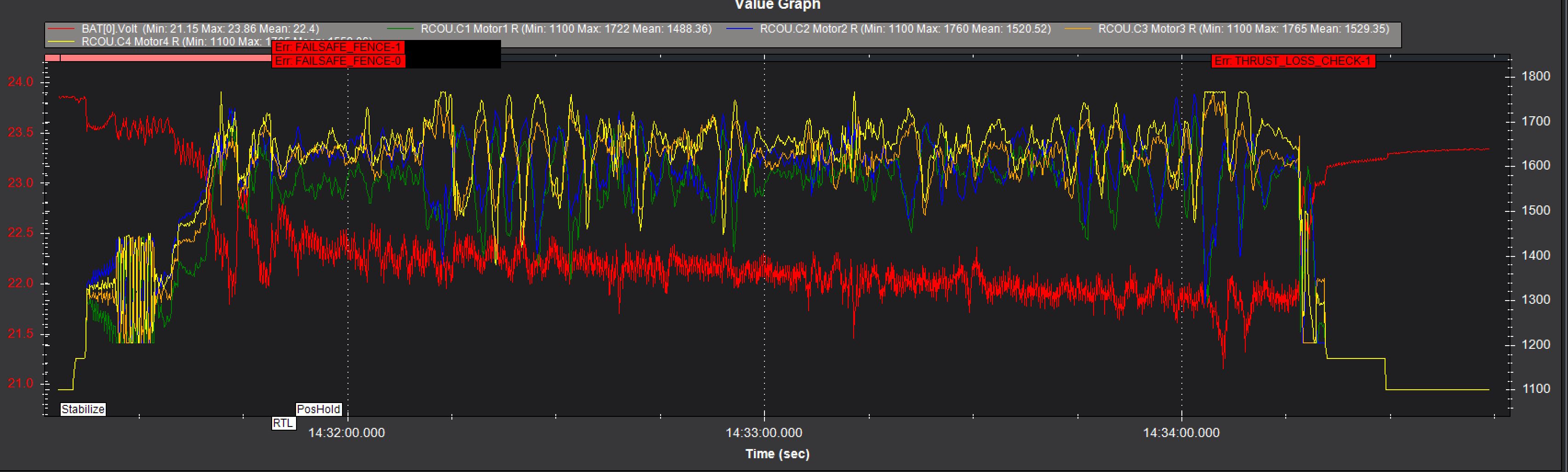
This shows the craft is underpowered/overweight with a Thrust Loess error in the log. This could be a problem under flight demands and may present a problem when attempting Auto Tune. And before we can check the Notch Filter setting you have to change these parameters:
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
The vibe levels are good. Can it lose any weight?
I noticed that the battery is sagging quite a bit for a short flight.
Dave. I appreciate the input. We where testing with batteries at about 65-70%
This configuration I have is the remains of my 9 year old DJI Spreading WINGS S900. It the crash, I was able to save 4 arms. It looks like the S900 now, but with just 4 motors. I did install 2 ea 5200 mah 100c lipos. I can try Flying with one. There goes my flight time. I tested this config by placing 4 pavers on the frame, and proceeded to apply throttle and at a point just above 50% it wanted to lift the bricks. Could the fact that the batteries were NOT fully charged, cause those readings?
P.s. the pavers weighed 14 lbs.
Thanks,
Rick…
Yes, but I still think you will have to lose some weight either in battery or payload. You do not want a thrust loss error at anytime under any circumstance. That means an output is driven to max and then stability and control will be lost.
If you want to check this for yourself graph thre RCout’s in the log. At Hover you want the average output to be ~1500µs or less.
By the way… did a weigh in 11 lbs.= frame plus 2ea 6000 mah 6S lipos
I think we found some LiPos that are 120c 6S 10,000 mah and weigh in at 2.3 lbs.
Just to give you an idea of its size. I think you nailed it on the head. Gonna take your advise and lighten it up.
Will rerun test and log with all at optimum conditions.
BTW. The present 12,000 mah weighs in at 3.51 lbs.
I should be able to save about a pound.
Thanks…
Dave, I forgot to ask, how can I get the color graph that you sent me to view.
My helper with this project pointed out to me the data that we can use from that chart, and would like to know how can we process that .bin file to see the graph?
Hi Dave. Took a sabbatical for my health for a while. But back to the Quad I so lovingly named. Frank N. Stein. I have set the LOG parameters you recommended.
For my own edification, what are you looking to see in the log files of the next flight with these new settings?
The adrenaline is running now that we’re getting close to the end. Looking forward to doing a successful auto tune with your help. Thanks again.
Rick…
P.S. I removed about 3.1 lbs. by running on (1) 6S 6000 mah LiPo instead of 2.
I expect an increase in stability, and maybe a pretty decent flight time.
If it performs well, I have found a 100c 6S 10,000 mah LiPo which weighs slightly higher than the 6000. Fingers crossed……
Hi Dave……. Haven’t been able to fly here in Florida. Weather really crappy,
Rainy season. Anyways, I think it would be good to get a long range 2.4 GHz
Telemetry transceiver to be able to monitor data and waypoint missions in real time. Which unit do you recommend? And where is a good place to purchase?
Thanks
Thanks Dave for the reply. The transievers you’re referring me to are high VHF frequencies if I remember my military radio days. 433Mhz and 915 MHz. I know that 2.4 is in the microwave spectrum. I don’t know how far a 100mw @433 MHz or 915 MHz signal will go but I do know that the same amount of power at 2.4 GHz
Will go farther than I ever need. That is LOS (line of sight). I think at least a couple of miles I would say. What do you think. holyBro sells the S900 which I believe is 2.4 GHz.