What Dave mentioned you have not done yet. the entire process is mentioned here.
IMU temperature calibration
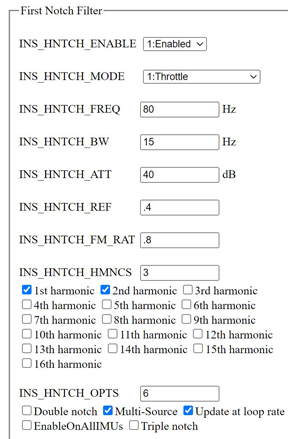
Notch filters setup
Third flight: MagFit
INS_HNTC2_ENABLE,0
INS_HNTCH_ENABLE,0
INS_TCAL1_ENABLE,0
INS_TCAL2_ENABLE,0
INS_TCAL3_ENABLE,0
if me, I will make the following changes and go for another short Althold hover flight, check vibration, and configure the Harmonic Notch filter to reduce noise and vibration. I would use the external GPS as the primary compass. I usually would also like to slow down the vehicle for the initial phase.
ATC_ACCEL_P_MAX,78000 # 15" propeller
ATC_ACCEL_R_MAX,78000
ATC_ACCEL_Y_MAX,22500
ATC_ANG_YAW_P,3.8 # Uses new formula
ATC_RAT_PIT_FLTD,15
ATC_RAT_PIT_FLTE,0
ATC_RAT_PIT_FLTT,15
ATC_RAT_RLL_FLTD,15
ATC_RAT_RLL_FLTE,0
ATC_RAT_RLL_FLTT,15
ATC_RAT_YAW_FLTD,0
ATC_RAT_YAW_FLTE,2
ATC_RAT_YAW_FLTT,15
ATC_THR_MIX_MAN,0.5 # Thrust hover learn, done
COMPASS_USE2,1 # use external + built-in
GPS_TYPE,2 # u-blox M9N/M10, External as primary
INS_ACCEL_FILTER,10 # 10 is the new default
INS_GYRO_FILTER,30
INS_LOG_BAT_MASK,3 # See both b4 and after
INS_USE3,0 # Pixhawk 6C only got 2 IMUs
LOG_FILE_DSRMROT, 1 # Stop logging to current file on disarm
LOIT_BRK_DELAY,0.3
LOIT_SPEED,250 # slow down, increase or put back later
MOT_THST_EXPO,0.66 # Uses new formula
MOT_THST_HOVER,0.35
PILOT_ACCEL_Z,150 # slow down, increase or put back later
PILOT_SPEED_DN,75 # slow down, increase or put back later
PILOT_SPEED_UP,75 # slow down, increase or put back later
PILOT_Y_RATE,22.5 # slow down, increase or put back later
PSC_ACCZ_I,0.7 # x2 of MOT_THST_HOVER
PSC_ACCZ_P,0.35 # = MOT_THST_HOVER
If both noise and vibration are low, I will go for a small pitch and roll movement Loiter flight. followed by slowly increasing pitch and roll to check oscillation. if okay, I will go for a quiktune which will be completed within a few minutes.
Then save the tuned value and go for a Loiter more movement flight check before Autotune. After that, if needed, I can go for another quiktune to check the value and the flying different.