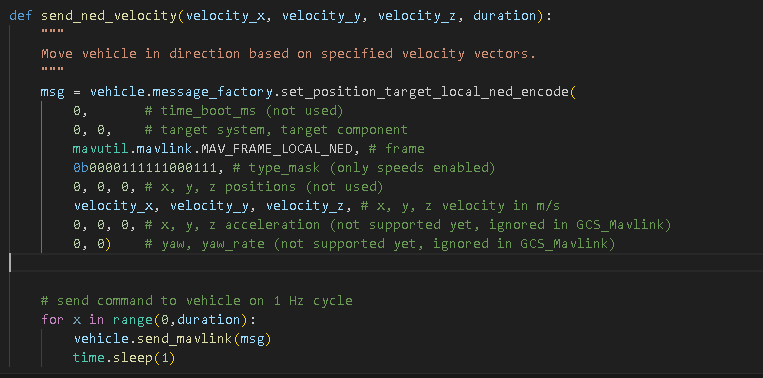
Hi! I’ve just dived into ROS and Mavros to control my copter, previously i used combination of Mavlink, Pymavlink, and Dronekit. I command the copter by creating a message factory with Pymavlink or just using a Dronekit function. I could specify or adjust frames of the movement there, like whether i want to use MAV_FRAME_LOCAL_OFFSET_NED or MAV_FRAME_BODY_NED, etc.
But, in Mavros, i got confused on how to set this parameters, i read from the documentation that Mavros acts as a bridge between MAVLink and ROS.
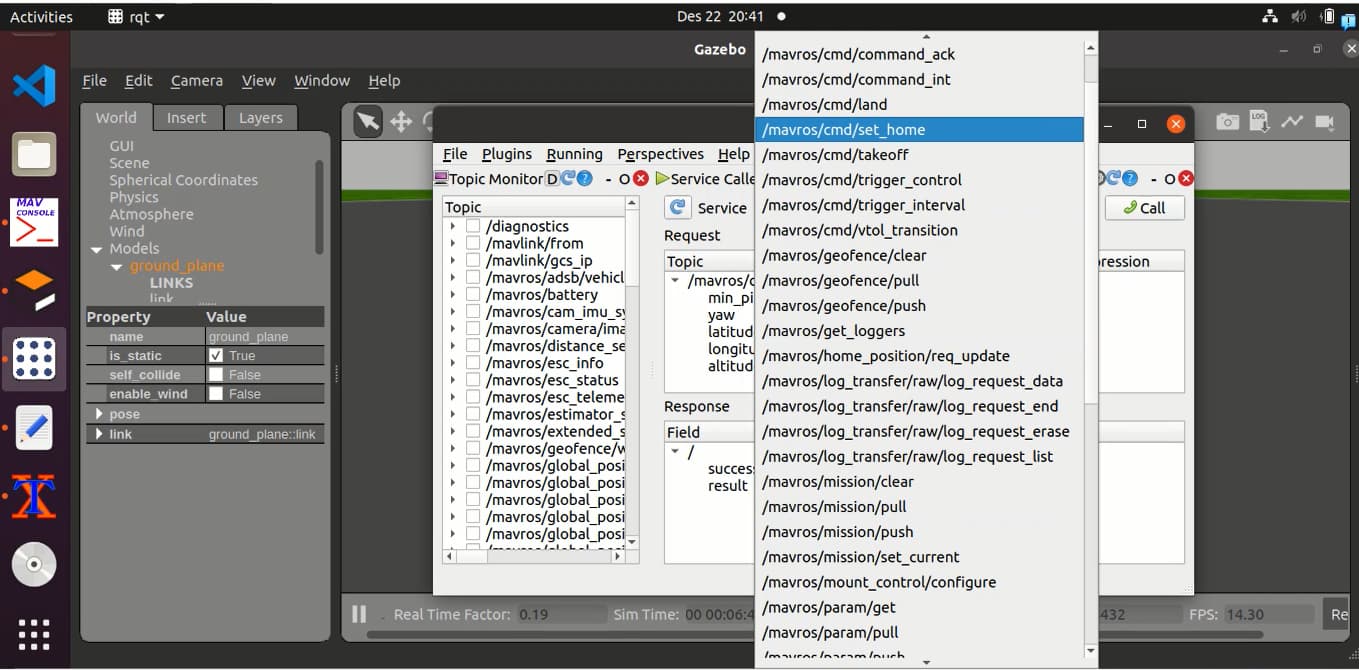
The question is: Are all the settings or parameters or commands in Mavlink equivalently converted in Mavros, or is there any parameter or setting that is kind of simplified? And how do i do the same commands in Mavros? Thanks in advance!