I am not able to open the logs right now - no access to a computer - but have you considered going to the latest FW version (3.5.5)?
You are on 3.2 which is a little dated - many many things have been improved since then - and the current body of experience of folks on this forum is with that version, you might be able to get help easier once you are there…
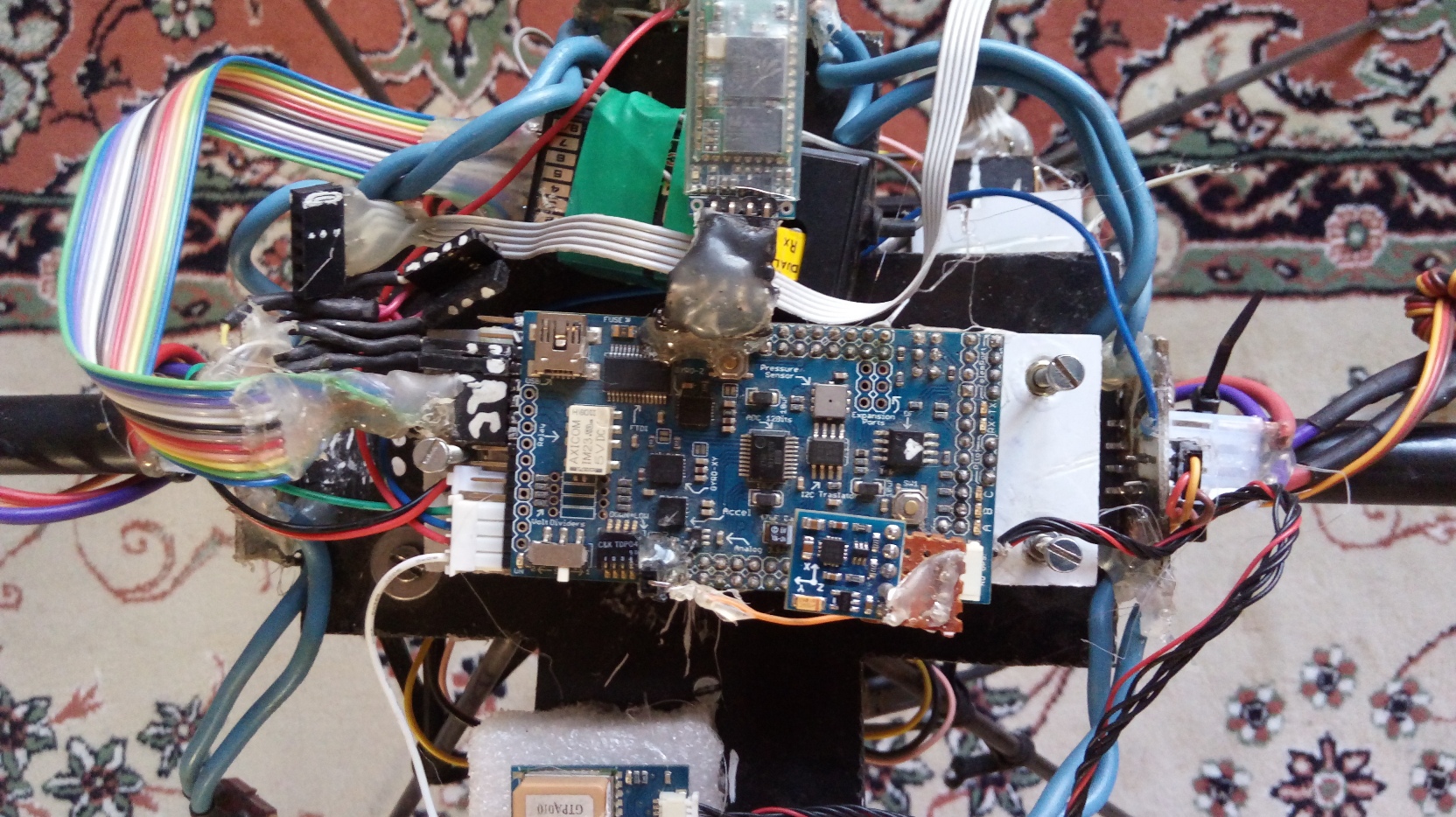
Also, probably would be helpfull to share what components you are using etc. - looking at logs alone can be hard without clues…
I’m sorry @CLabeck but my limitation is my hardware whereas my APM1 not let me move to newer firmware , so I hope you could help me in this situation
BR
@Eosbandi, it is , but actually I fired 8 months ago and still looking for job so I decided to follow back to one of my hobby that I leaved it 8 years ago, so actually this APM1 and other hardwares are remain part of that project
Having started with the APM1.3 I can tell you that although you can get it to fly, it is not reliable enough, especially for a large copter.
At the very least upgrade to and APM2.6 which you should be able to pick up for peanuts.
A Pixhawk of some description would be better.
Everything else on the copter is fine, just the flight controller upgrade is highly, highly recommended.
And you will be able to do a lot more with it.
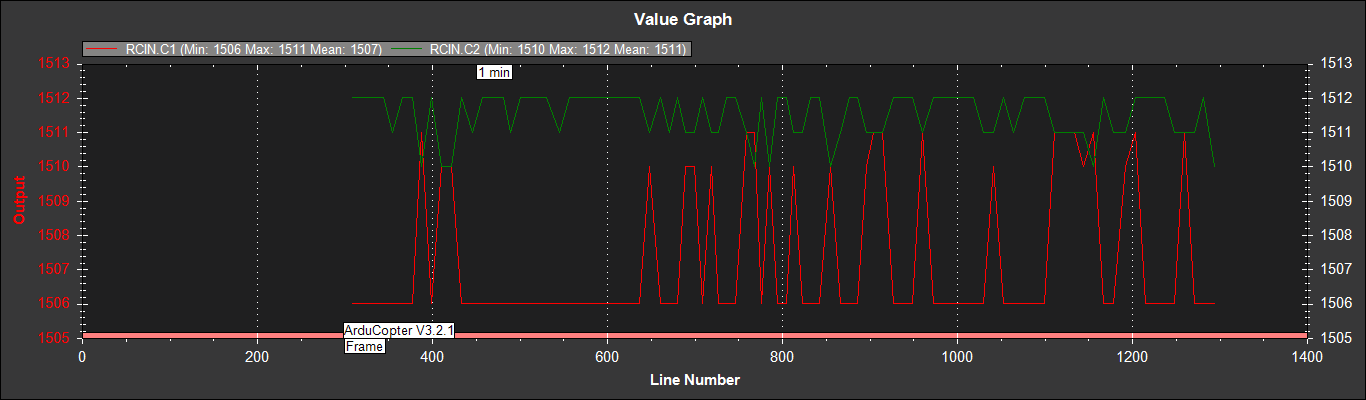
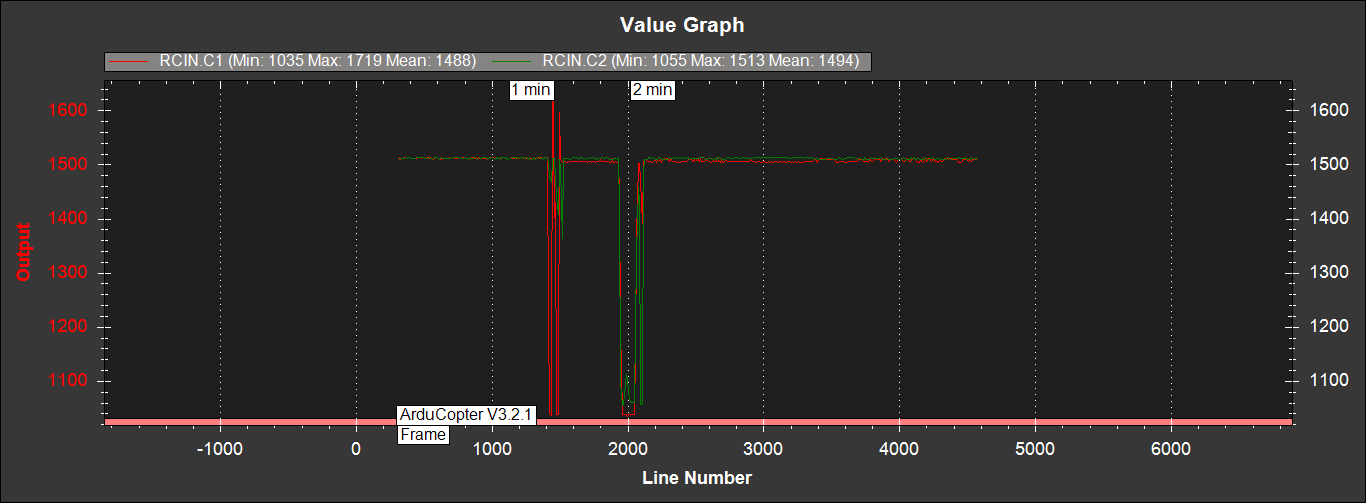
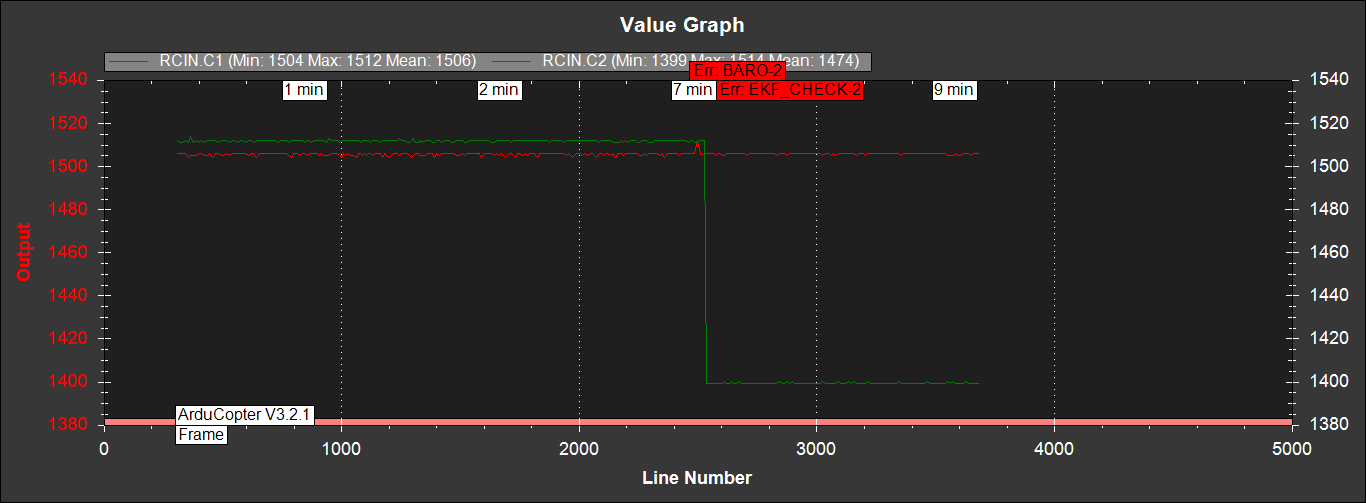
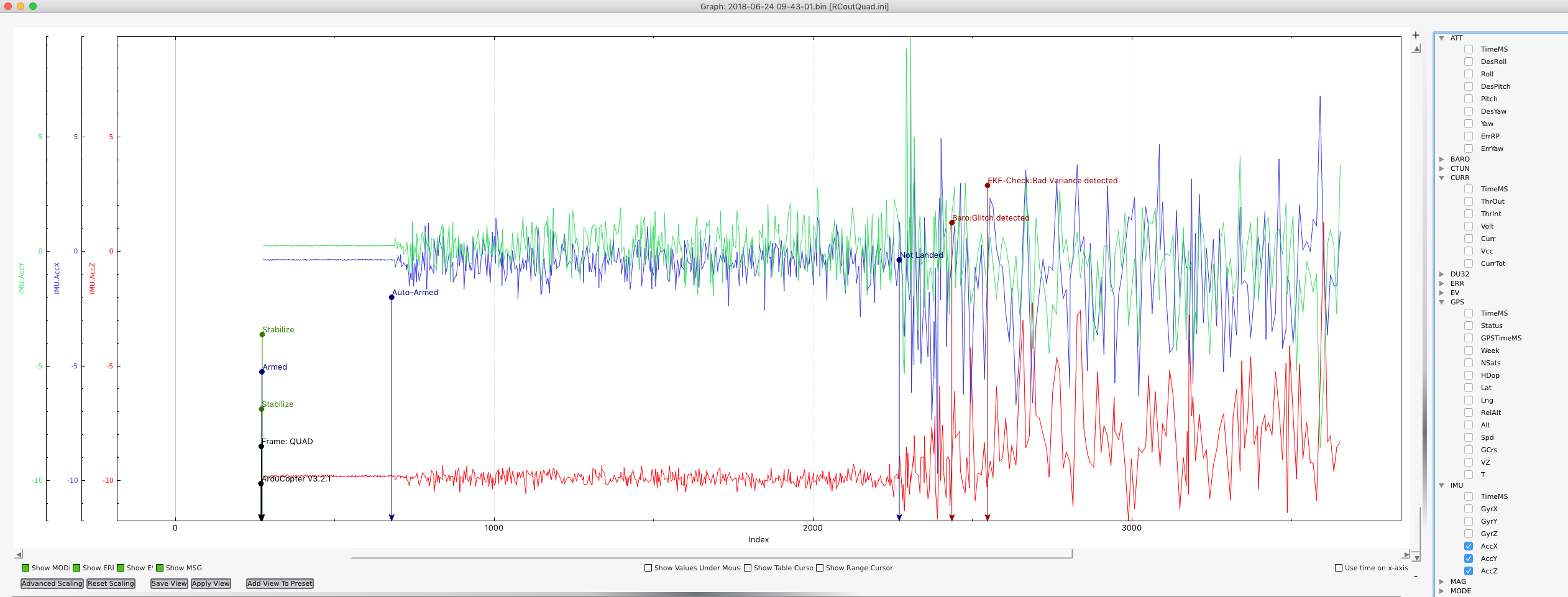
For this one, your vibrations are way too much, which is going to make it erratic at best.
Suggested:
Secure all loose items. Wiring, esc’s, anything else we can’t see on the photos.
Improve vibration dampening on the APM.
Connect up battery monitoring, volts and amps
Control the copter with RC as all new build will not just straight up, especially if you are hesitant on the throttle.