–Ignore all the posts before 1/26… have more info now… While the copter goes out of level in the air, it thinks it is still level. When I land and place it back on a level surface, it thinks it is tilted. Then I can watch the hud slowly level.
This is probably a physical issue, but I can’t find it…
My first guess is maybe my rubber standoffs are changing size or moving or something? The screws are all tight…
I’m using a small omnibus flight controller w/ m2 rubber standoffs as the mount.
After every reboot my level is quite far off. I have to move my trim about 1/2 way across its range each time. What’s strange is today powered up, leveled it, flew a pack, immediately swapped battery, and my next flight was out of level again. It wasn’t a hard landing. There wasn’t any time for a large temperature fluctuation or anything. So that has me not 100% sure it’s a physical issue.
It doesn’t seem to get worse over the course of a flight… Just after being powered off.
I’m wondering if anyone else has experienced something like this? Could a bad sensor or anything electronic cause this?
Well that’s what I mean…
I take off, adjust my trims, land, save trims, recenter my transmitter, then it’s ok for one flight.
After powering off, it’s not level again.
It is saving the trims… I have checked the values in the config.
I had my ESC’s set to auto-timing, and thought maybe it was giving different values to different motors, but reset the timing to a static setting today and tested again, and that wasn’t the issue. All my other ESC settings were on the blheli_32 defaults. And now all of the settings are the defaults.
I am still assuming it’s an ESC or motor issue at this point, though I don’t know anything really, w/out logs.
The time it yawed I was inside near a speaker, so maybe that was magnetometer interference… It was in stab… Not sure if it uses any input from the magnetometers in that mode, but if so, then I’ll assume that was the issue w/ the yaw.
I just need to figure out this level issue…
thanks for the response.
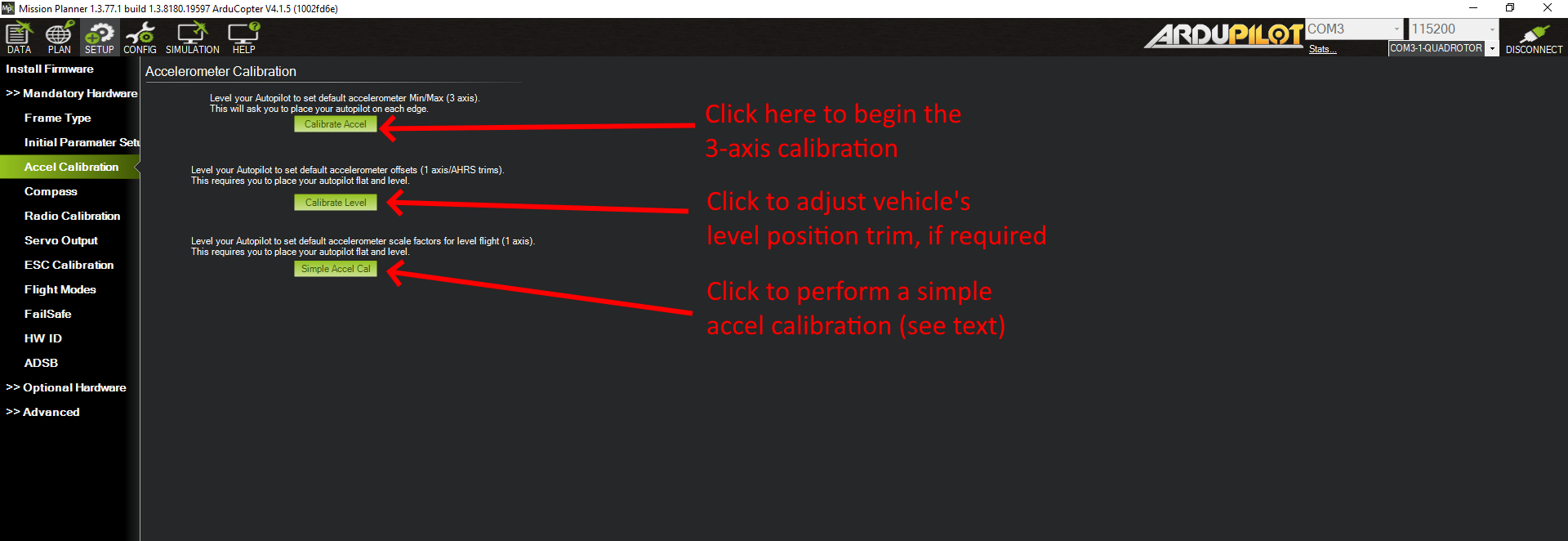
Are you doing the Level calibration as per this Mission Planner screen shot?
I use a light-weight level across the top of the motors to ensure the craft is as near to actual level as possible, and put wedges under the legs as needed. Just being on level ground is not always as level as you think.
I have done the calibrate level from MP, too… If I calibrate level and fly, it’s fine… But same, after powering it off and back on, it’s tilting to the side again!
I am starting to take notes to see if it’s random or if I’m going back and forth or what… It’s always a little bit off forward or back… And way off to one side. You can visibly see that it’s not level in the air. No more than 10 degrees, but still, noticeable.
I’m not new to arducopter. I build or rebuild a copter every couple months. (Having said that, I’m open to hearing any advice, even simple stuff because I may have overlooked something). I use this “save trim” method to level all my copters. There is something strange going on w/ this one…
I use the same transmitter w/ a bunch of copters, so don’t think it’s an RC control issue.
Once I have logging available maybe I’ll be able to see what the problem is…
Thanks for the suggestion, though.
After that I was thinking the origin was the notch filter applied, because when I disable it the level problem somehow was less present.
But it took me so many headaches to find out that the problem was the FC was to busy! too much processing!
First I was using loop rate at 800 and 1000 plus I had a custom firmware with additional calculations for an indoor localization system. This was the cause, asap I disable my additional calculations the level issue disappear.
…For this reason when I add to the chain the notch filter too, the quad became even worse.
Probably it’s not yours situation, but the symptoms you have seems exactly what I was fighting for so many month .
Thanks! I do have my loop rate at 800, but I do on another copter too, w/out any problems.
But, this definitely gives me something to check.
Thanks a lot.
Also, I got master installed last night with flash logging support. So, I can make logs now!
I’m busy today, but tomorrow or this weekend I will get some logs and hopefully figure this out.
Yes you need logs!
and if you are using more than 400 loop rate and depending by the FC and its MCU if you observe carefully the normal stabilize flight you can see difference!
When you are close to the limit of our MCU for example I can’t use the EKF3 (its more processor intense), instead with the EKF2 the flight its perfect stable in all test I’ve made.
Moreother in that situation also disabling the logs helps to determine a perfect flight or the more item in the logs I ask and more micro oscillation in normal flight.
Wicked1-I think I have seen this also when playing around with high loop rates in the 800 range (Omni F4 nano V6). I noticed after a minute of hovering the quad would start to slowly roll left until full stick wouldn’t correct it. So on the bench I could actually see this holding it in my hand at a low throttle. The HUD would indicate a slow roll which of course wasn’t happening. I put this quad on the shelf frustrated w/o logging but logging is functional now on it so I’ll get back to this. Loop rate back to 400 for now.
My other nano v6 has absolutely no problems w/ the same settings (I copied the config from it). But, this definitely sounds like the issue I’m having.
Did you verify that once you went back to 400, it was ok?
Did you look at your CPU load? (There’s a CPU Load readout in the “status” screen in MP). My working copter @800 had a load of about 38%, at idle sitting on the bench… I never looked while I was flying, and didn’t have logging at the time.
I don’t know what this new one is.
I can’t wait to get some logs this weekend!
Actually I have it back on the bench now as its peaked my interest but haven’t flown it yet. Weather is terrible here, maybe I’ll try the basement. At 400 load is ~28%, at 800 it’s ~50%. If it makes any difference (not sure yet) logging is set to default (958). I haven’t done anything with logs yet but it’s so nice to know they are there!! Maybe it needs quite a bit of overhead for the IMU? One would think 50% would be OK. Then I look at my F7 board and it’s single digits…
Arg, I tried having a quick flight, and it’s completely unflyable w/ master on it…
I disabled logging, and set my loop rate to 400 w/out any change… It just oscillates.
Well, I’m signing off for now. I’ll try some things later.
OK, I think it’s safe to ignore all my previous troubleshooting…
Today I noticed the hud appeared tilted while I was holding the copter level in the air by giving it some roll input.
So, I level the copter. Take off, it flies level. It slowly starts tilting to the left, but the HUD still appears level. I let it build up some error so it’s pulling strongly to the left…
I land and place the copter back on a level surface, and the hud is tilted. It slowly corrects.
What could cause this?
Vibrations? (My vibes are very low on this copter)
Bad FC? (I hope not!)
Anything else? Tuning? (It’s smooth, no oscillations)
Now it really sounds the same as the issue Dave and Giorgio were having… Only my loop rate is currently at 400 and it’s doing it… Though not so severely. Mine is only off a couple degrees. @dkemxr, let me know if yours is still pulling to the side even a little w/ the lower loop rate.
If you have any main power wires near your the flight controller you should twist them and move them away because they can affect the gyro’s and acclerometers.
It is definitely related to power or vibrations… Something about the motors spinning.
If I hover, it takes a few minutes to get to a certain point… If I hold it in my hand and give it full throttle for about 30 seconds, it’s at that same level of… unlevel.
I do have power wires under my FC, due to the way my ESC is made. It’s a 4 in 1 ESC so is directly under my flight controller. It has the power pads in the middle, so they’re between the ESC and FC for a short distance… The wires are tightly twisted, up to the power pads. But that’s right in the middle of my flight controller.
The gyro’s and accel’s are on the top of the board, and not even directly over the wires… But, this is a tiny copter, so everything is close.
This will be difficult to change, but I might need to try it…
Thanks for the suggestion.
That’s what I’m afraid off… Bad IMU… I don’t want to swap the FC! I love directly soldered connections when things work out, but not fun when there’s a problem.
And URG… It seems like 50% of the stuff I buy related to this hobby is faulty… On just this copter I’ve already found, brand new, a bad motor (disconnected stator wire), ESC (one output wasn’t stable until about 25% throttle), and now maybe the FC… I think we’d all be better off if we paid a little more and actually had some QC at the factories… Less wasted materials… Less shipping bad products around the world, etc…
I’ll try a few more things, and wait for maybe a couple more replies before I give in and buy another FC. Since some people are having the exact same symptoms related to the loop rate or other settings, I still have a little hope it’s something that can be solved…
Im not sure how well ardupilot code handles electromagnetic interference from a 4 in 1 esc being below the flight control board. If I were in your shoes I would move to individual esc’s away from the flight controller.
 .
.