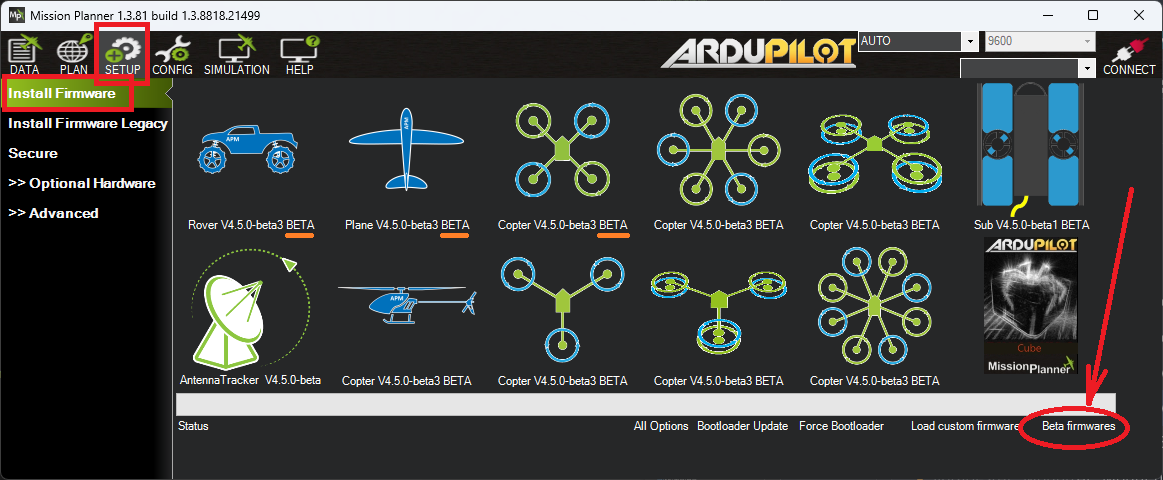
Copter 4.5.0-beta4 has been released for beta testing and can be installed using MP or QGC’s beta firmwares links. Alternatively it can be directly downloaded from firmware.ardupilot.org.
Do you plan in your dev schedule to implement RSSI dbm and LQI as in ELRS documentation? Do you plan to implement corresponding (OSD) warnings? Thank you
The only RSSI related issue that I’m aware of is issue #22363 and this is apparently resolved by PR #22406
EDIT: we also have PR 25844 going through peer review.
It sounds like you’ve found another issue. Is there a discussion somewhere? The normal flow is a discussion where the issue is confirmed to be a bug after which we create an issue and then finally someone (hopefully) fixes it. Sometimes we short-cut this flow if it’s an easy fix. Enhancement requests also go into that same issues list.
Hi @rmackay9
i have configured Ardupilot parameters every thing related to Mount and cam type correctly AC 4.5.0 beta 4.param (20.0 KB)
when the gimbal power on it automatically Moved YAW left and Pitch 45 degree down automatically.if i try to control the gimbal its responding but when i leave the RC control its come to its original position.
please refer to this video SIYI A8Mini camera.MOV - Google Drive
before i was working with Sbus control and i don’t face this issue.
@SIYI
i just installed latest camera and gimbal firmware ( 0.2.4 and 0.3.6 )respectively.
after installing the gimbal start jittering and gimbal control board ( wires connecting area) getting very hot .
NOTE: @rmackay9 if i disconnect the telemetery2 connection from FC (A8 mini connected port) the A8 mini no jitter.
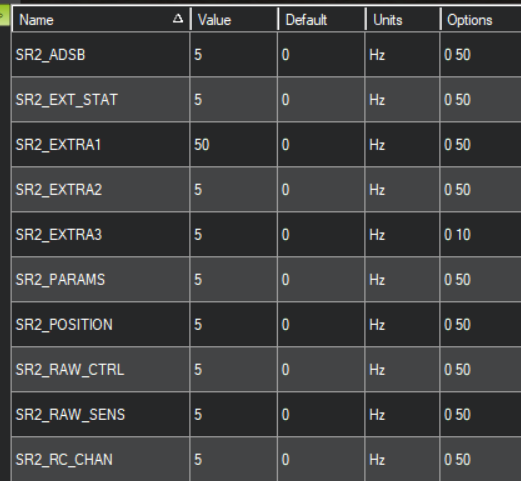
do you think its because of SR2 parameter
Thanks very much for the testing and reporting back.
I think the issue could be that RC8_TRIM is set to 1045 which is very low. Could you try setting this to 1495?
By the way, MNT1_RC_RATE is 0 so the RC7 and RC8 will be controlling the gimbal’s pitch and yaw angles respectively.
The SR2_xx parameters shouldn’t be an issue because, assuming the gimbal is connected to Telem2 (aka Serial2) then the Siyi custom protocol (not mavlink) is being used.
Thanks for the quick reply.
Yes the issue was trim setting and mount RC rate parameters not set correctly.
Now I found another issue which I don’t know it’s related to gimbal or control.
I given continuous pitch and yaw but gimbal particularly stops for at least a second on both axis.
See the video here IMG_0289.MOV - Google Drive
As you mentioned the protocol is different than Mavlink and SR2 parameters doesn’t affect the system.
But SIYI manual strongly recommends that to set the SR2 parameters to sync with autopilot attitude data during flying.
Before when I connect with SBUS alone control doesn’t have this jitter issues.
OK, I’ve added the bouncing near the pitch and yaw limits to the 4.5.0 issues list.
Re Siyi’s instructions to set the SR2 parameters which can’t possibly have any effect, I can pass on the suggestion to them but it’s really up to them. The ArduPilot setup instructions are what should be followed.
EDIT: we definitely don’t expect everyone to read every line of our enormous wiki but just for future reference the TRIM issue is mention here in the wiki. The relevant line is
ensure the RCx_TRIM parameter for each RC input channel used is half way between RCx_MIN and RCx_MAX
Again, not trying to pedantic and annoying… I just had to check for myself to be sure it was written because this does come up now and then. Maybe we need a pre-arm check to alert users if they haven’t done this.
Hi @rmackay9
Also could you notice that pitch axis stop and move at around -35 degree gimbal position as well as Yaw axis also stop and move at some point in the video even though RC wheel control given continuously.
Actually I didn’t notice that bouncing problem at the pitch and yaw limit thank you for that.
Sorry but I’m with old problem. I can’t enable Guided non GPS mode for 1 MB board.
Matek 405-TE
I set in config.h " mode_guided_non_gps_enabled enabled (big letters as should be) but “No such mode 20” error any way.
In 4.4.4. It present and work normally.
Thanks for the report. I’ve reproduced the issue and hopefully @peterbarker or one of the other devs more familiar with the build environment can help us get to the bottom of this. I’ve raised an issue here and it’s on the Copter-4.5.0 issues list too so this won’t be forgotten.
hi @rmackay9 today i just downgraded A8 Mini camera and gimbal firmware to below version.
Gimbal Firmware : 0.1.7
Camera Firmware :0.1.6
i don’t change anything in the Ardupilot parameters and now there is no Video jitter issue and there is no Bouncing issue at the end limit in both YAW and PITCH.
Also there is no Stop and Move issue when giving the continuous RC control on YAW and PITCH.
As AP grows in features it is difficult to keep everything working given the limited Flash space (e.g. the memory that holds the program), RAM and CPU. This sometimes means that we need to reduce features but to alleviate this we’ve create the custom build server so users can get the features they need.