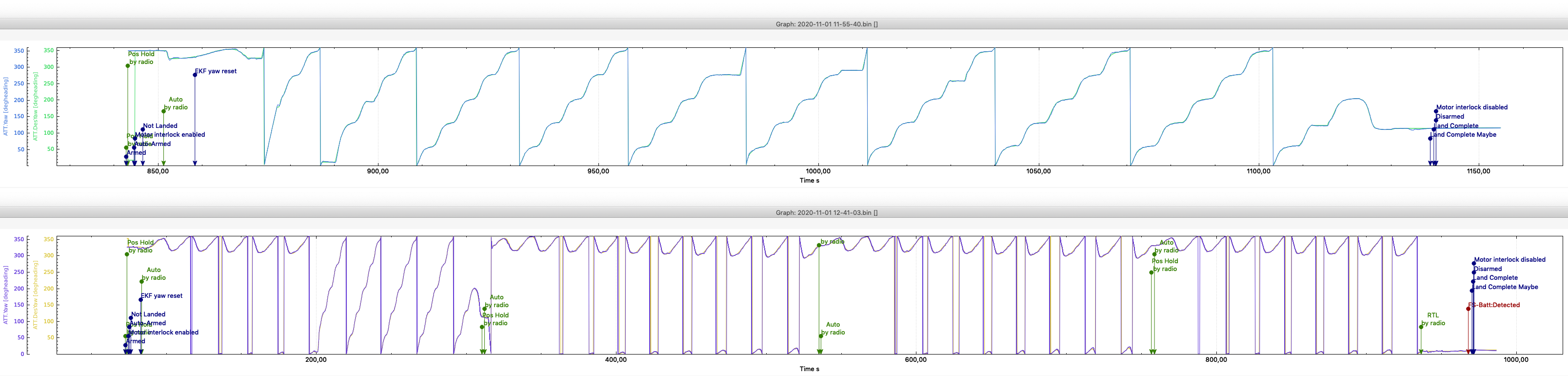
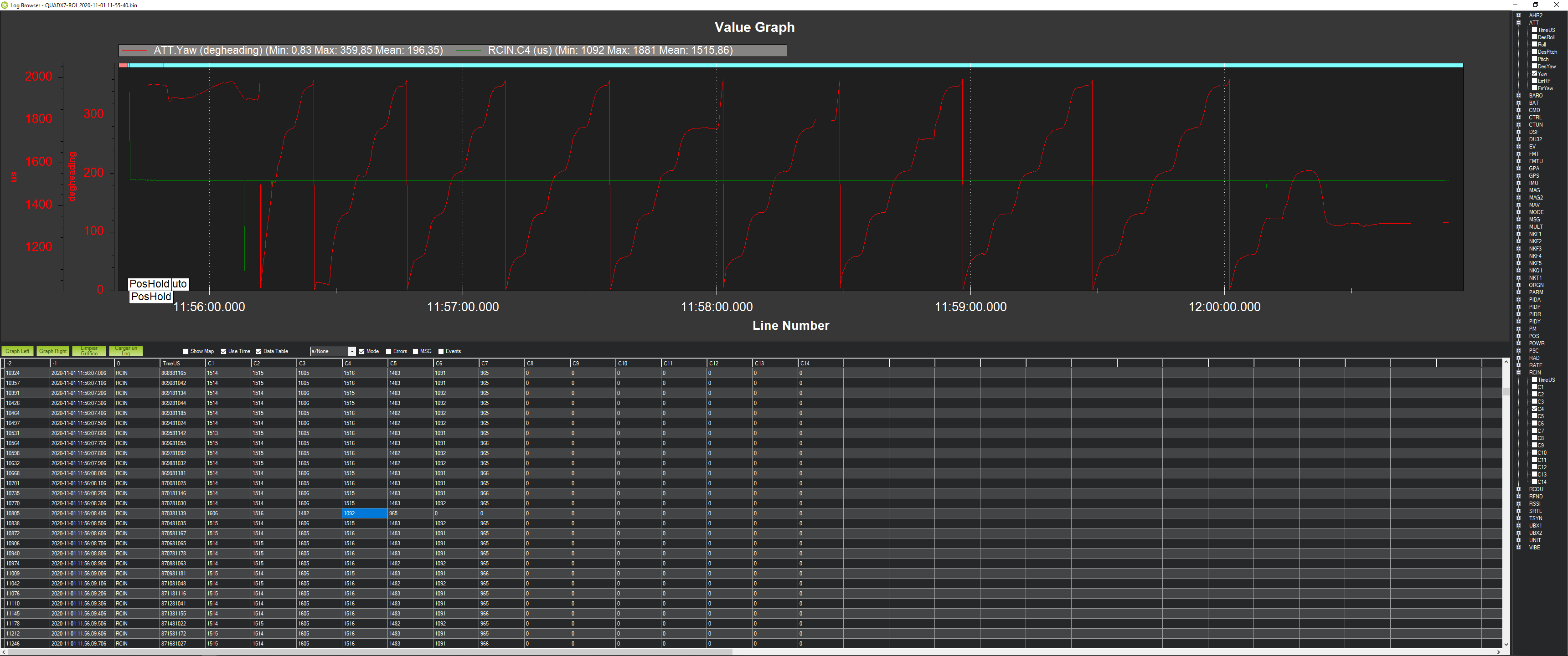
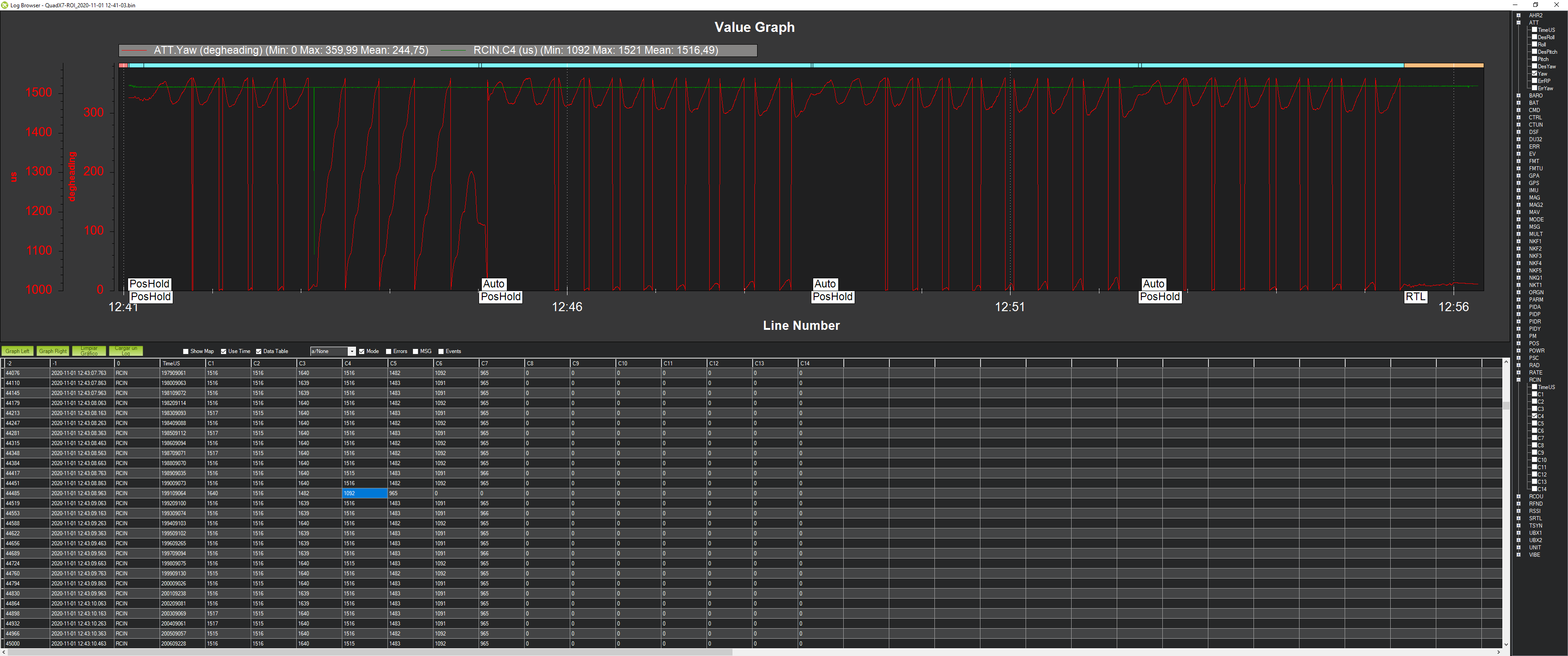
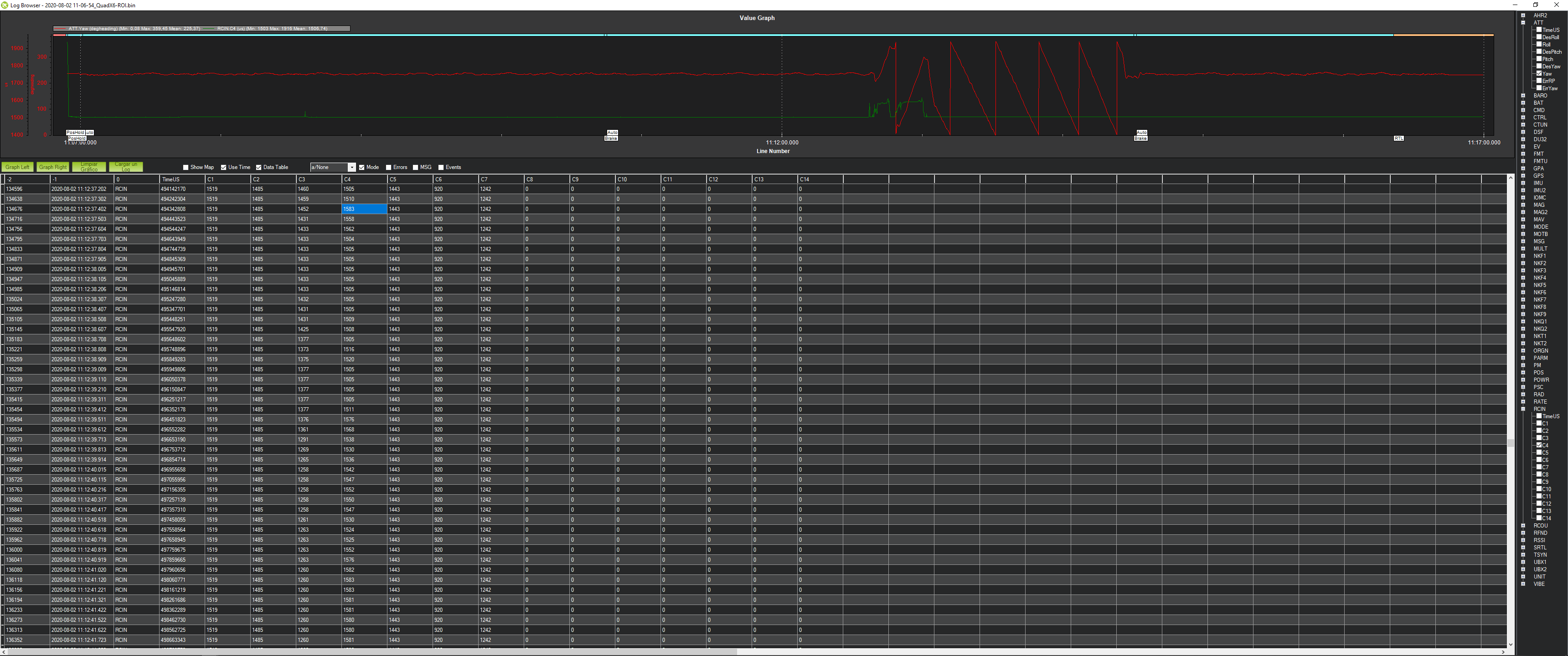
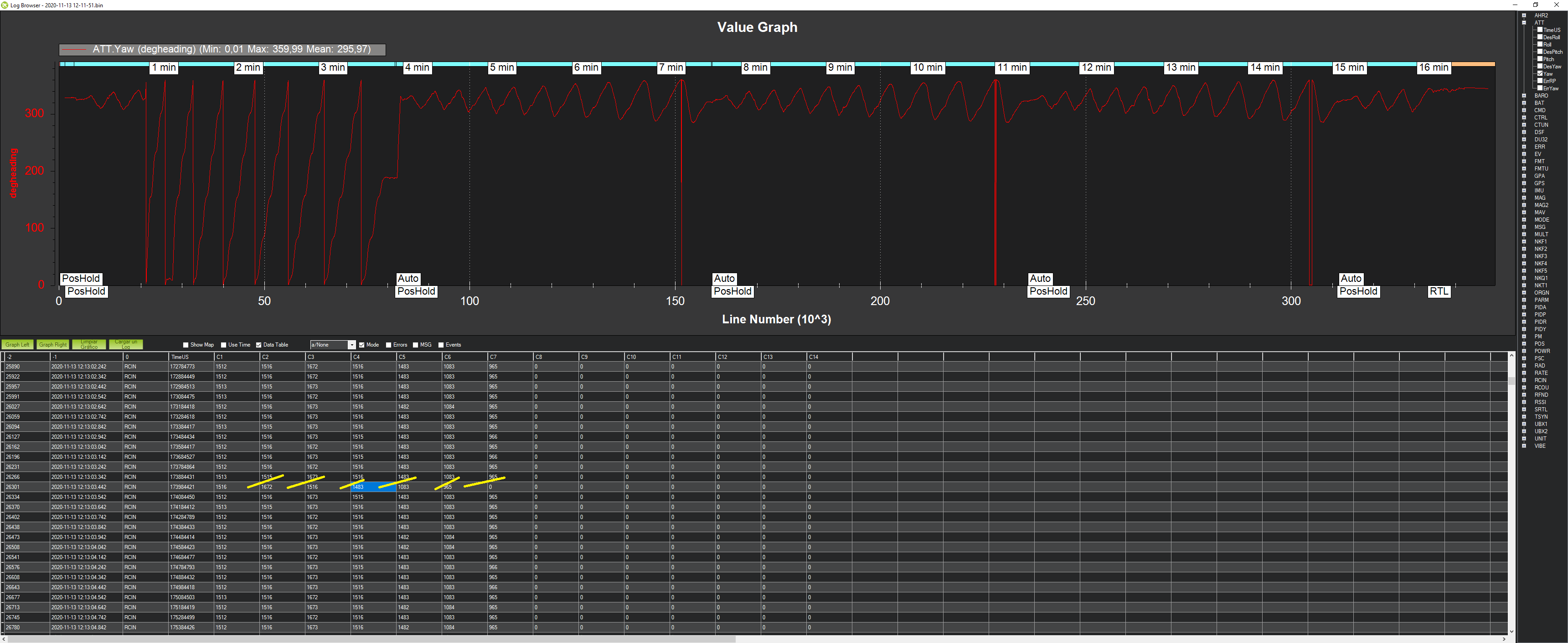
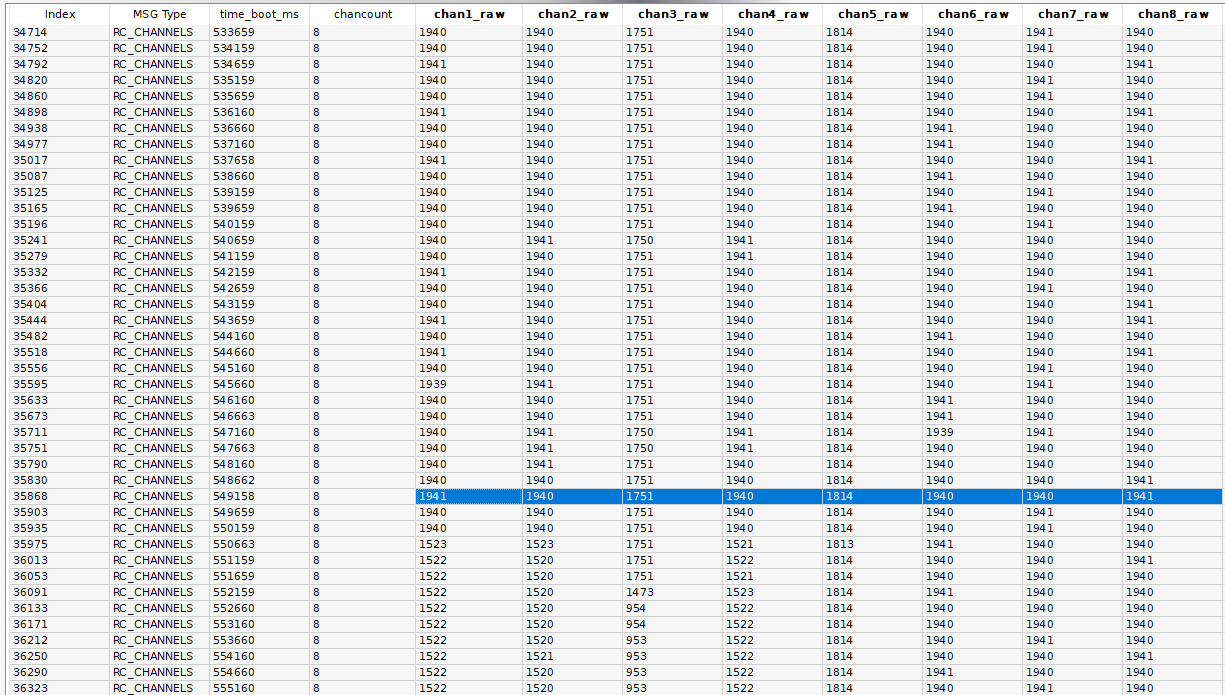
You are right: in both ROI changes there is a single message showing not only a glitch on RCIN.C4 but also value changes in C1, C3, C5, C6 and C7 (not in C2 ???). So surely this is related to the problem. Anyhow, I am not sure of what would happen if you change yaw with a stick during a mission (I am certain that changing throttle does nothing), but will try this next time.
The transmitter in this case is a Futaba 7C. C5 is on two switches for mode change (channel 5), C6 is a knob (potentiometer, channel 6) for gimbal pitch (unused), and C7 is on a switch.
RCIN.C6=0 and
RCIN.C7=0, as appear in the message, would be impossible to get.
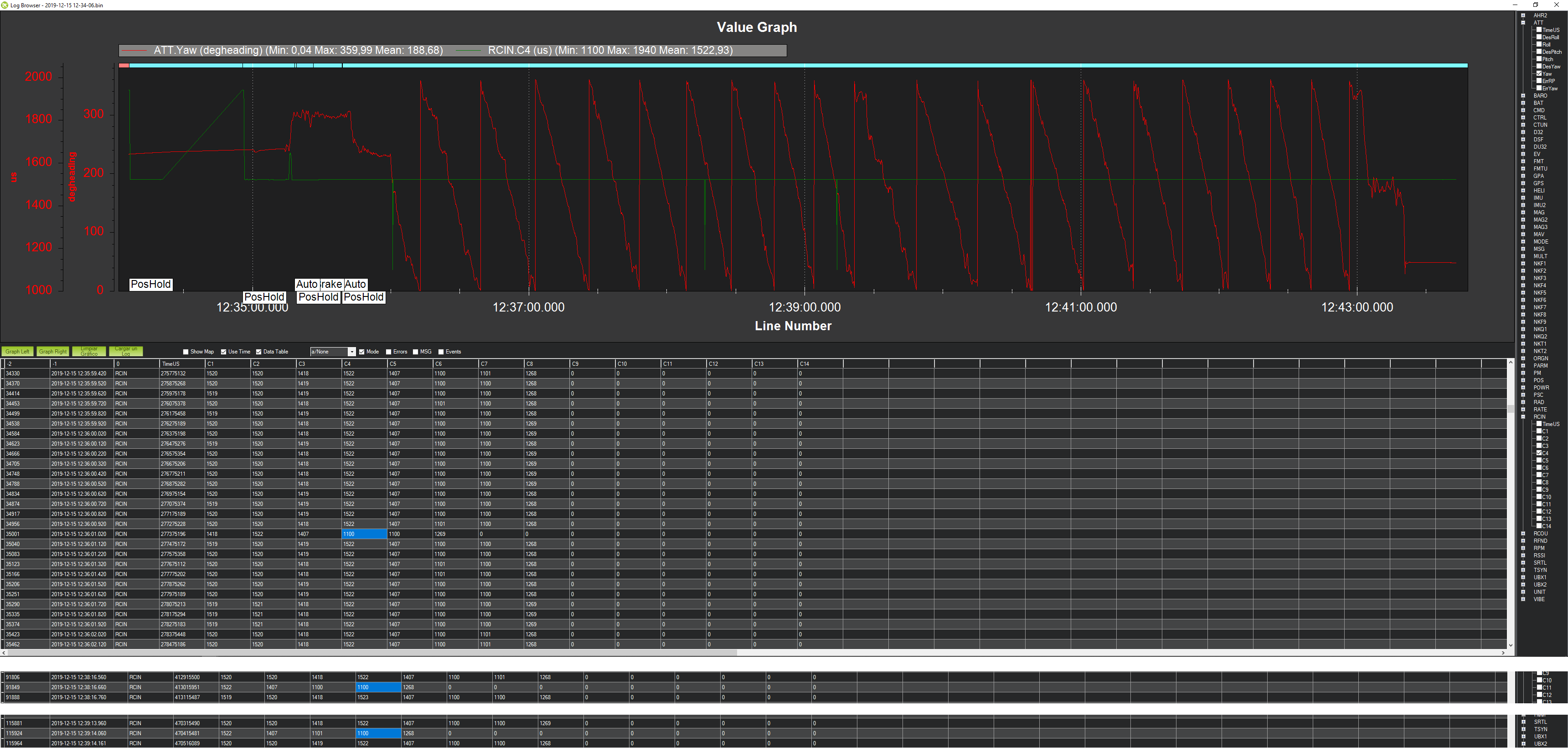
These ROI changes have been observed on different Arducopter versions and vehicles (first on Tradheli, with a Futaba T8FG), and using two different Futaba 7C transmitters.
Receivers used are FrSky TFR4-B in all these cases.
I didn’t move the sticks while in the mission. Otherwise, it would be impossible to manually do such a small instantaneous change on a stick, a knob and at least two switches, precisely with copter in north orientation.
These are the relevant configuration parameters:
RC1_DZ,20
RC1_MAX,1939
RC1_MIN,1146
RC1_OPTION,0
RC1_REVERSED,0
RC1_TRIM,1523
RC2_DZ,20
RC2_MAX,1938
RC2_MIN,1116
RC2_OPTION,0
RC2_REVERSED,0
RC2_TRIM,1519
RC3_DZ,30
RC3_MAX,1931
RC3_MIN,1092
RC3_OPTION,0
RC3_REVERSED,0
RC3_TRIM,1100
RC4_DZ,20
RC4_MAX,1950
RC4_MIN,1081
RC4_OPTION,0
RC4_REVERSED,0
RC4_TRIM,1520
RC5_DZ,0
RC5_MAX,1793
RC5_MIN,1092
RC5_OPTION,0
RC5_REVERSED,0
RC5_TRIM,1597
RC6_DZ,0
RC6_MAX,2119
RC6_MIN,920
RC6_OPTION,0
RC6_REVERSED,0
RC6_TRIM,1622
RC7_DZ,0
RC7_MAX,1884
RC7_MIN,965
RC7_OPTION,17
RC7_REVERSED,0
RC7_TRIM,965
FLTMODE_CH,5
FLTMODE1,2
FLTMODE2,0
FLTMODE3,3
FLTMODE4,16
FLTMODE5,9
FLTMODE6,6
For RCIN.C5=1482 mode is Auto. For RCIN.C5=965 (glitches) mode would be AltHold during an instant, but mode is not changed.
So unless admitting that two different Futaba transmitters (7C (Copter) and T8FG (TradHeli)), or three different FrSky TFR4-B receivers, produce sometimes somekind of simultaneous channel glitches, precisely when the controlled vehicle is oriented north, and simultaneously somehow producing RCIN.C6=0 and RCIN.C7=0, there must be other explanation.
Anyhow, since 1516-1092=24 > 20=RC4_DZ, I will change RC4_DZ=30 and keep observing.