Hi.
I’m starting with helicopters and I’m starting with TradHeli on a 450 frame with flybar:
Frame: HELI
Pixracer 00250024 34385105 35383135
ChibiOS: 0997003f
ArduCopter V4.0.0-rc2 (5701af1a)
The great thing is that it flew at first test and could do missions (better trimming pending).
I observe ROI waypoint is always forgotten soon in a mission. I occasionally have observed this in drones time ago, but with TradHeli it seems constant.
This is the mission:
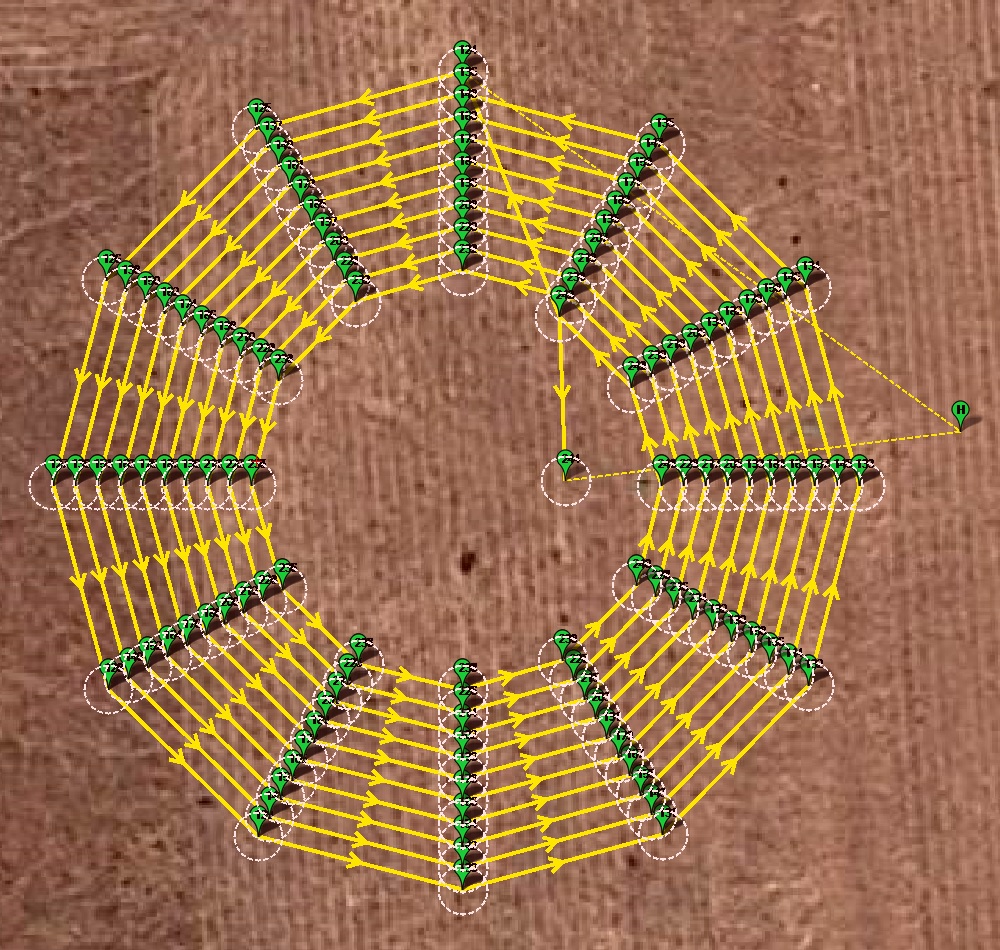

So the mission is two 10x12 spirals. At the beginning of the first one there is a ROI waypoint at 300º, so yaw should be maintained, but is soon forgotten. At the beginning of the second spiral there is a (0, 0, 0) ROI waypoint that should make heli point to next waypoint, but it was doing this long before.
Here are ATT.DesYaw and ATT.Yaw:
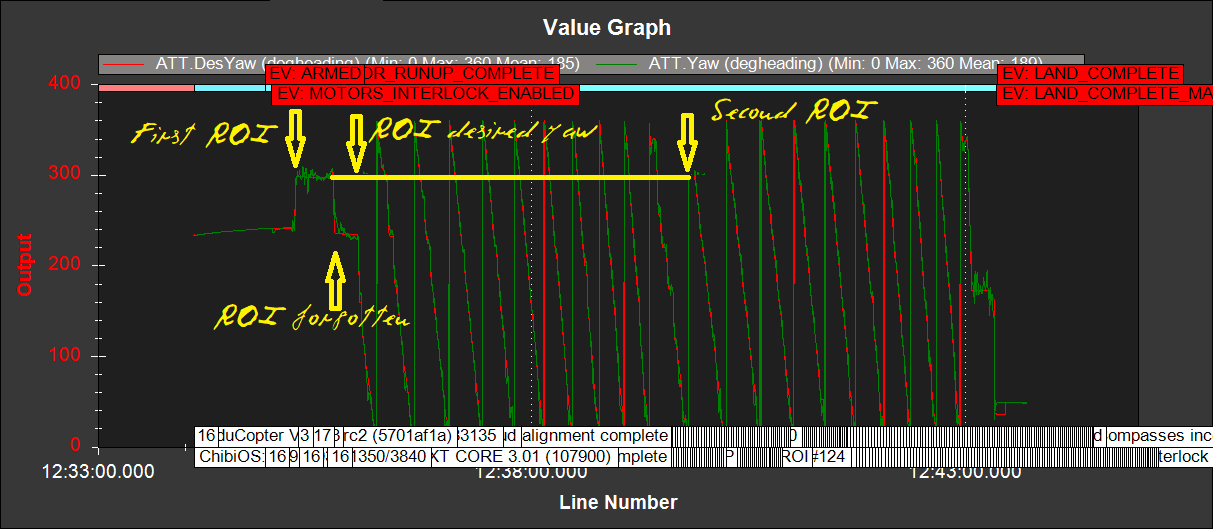
Here is a 4K video, with first ROI being effective during some instants.
This is the log.
What can happen?
BTW1 From the documentation, to clear a ROI:
…by adding a second DO_SET_ROI command later in the mission with all zero for Lat, Lon and Alt.
But (0, 0, 0) is a valid point to set a ROI to. Wouldn’t be more logical to use an absurd one, such as (90.1, 0, 0)?
BTW2 Starting on second 20 of the above video there is a twitch.tv transmission of the test. It is done with a camera with clean HDMI output and an HDMI encoder, which is affordable and widely available. The encoder weights 300p, so it and the camera can be placed on a rover or drone, and so transmit the on board vision (as with a mobile phone or RPi) easily and instantly (with some delay) to the worldwide world.