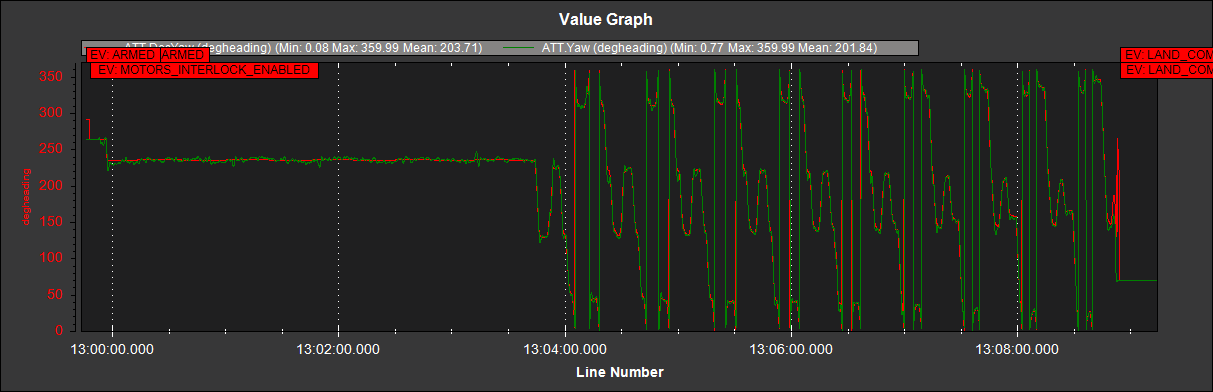
The ROI forgotten effect is still observed in rc3 (tlog capture, video, log):
I am observing this occasionally without a clear reason. With stable 4.0.3 it happened after hitting a tall grass (tlog capture, video, log):
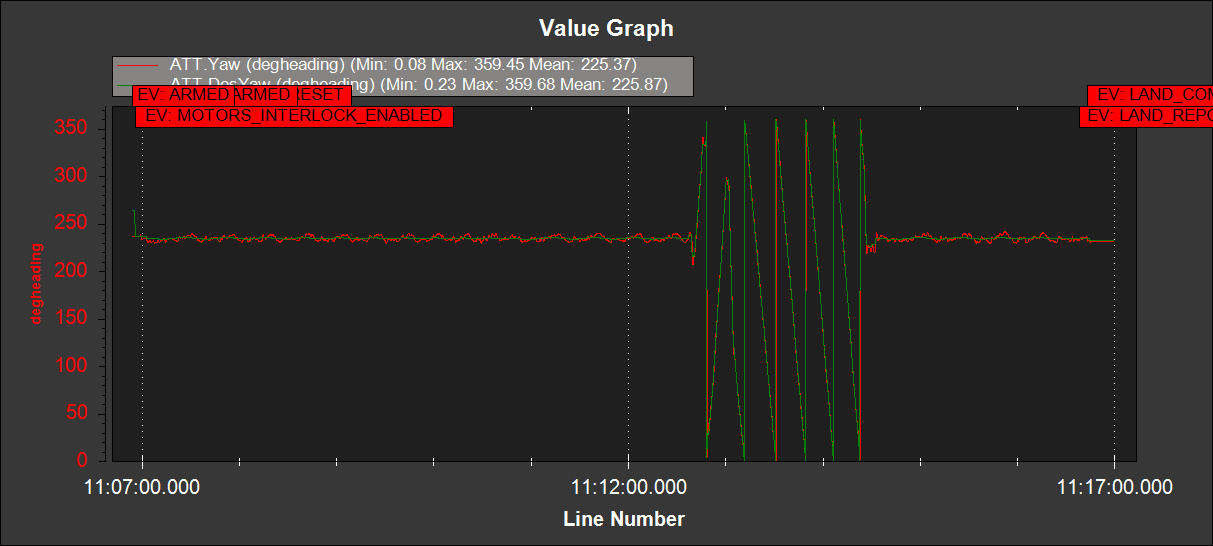
The ROI forgotten effect is still observed in rc3 (tlog capture, video, log):
I am observing this occasionally without a clear reason. With stable 4.0.3 it happened after hitting a tall grass (tlog capture, video, log):