I flew a pair of AutoTunes today, and upon reviewing logs, I stumbled on a never-seen-before event “Autotune Reached Limit”. It happens twice during each autotune.
Congratulations to the arducopter team,
I made a test flight today, while doing the flight I could observe some problems, such as altitude retention, which is not accurate when it receives the impact of the wind, so I decided to play with the following parameters:
With these values I get bad altitude retention
PSC_ACCZ_FLTD = 20 by default
PSC_ACCZ_FLTE = 0 by default
PSC_ACCZ_FLTT = 10 by default
With these values I get better altitude retention, but not as good as in copter-3.6.
PSC_ACCZ_FLTD = 40 value used in the flight shown.
PSC_ACCZ_FLTE = 40 value used in the flight shown.
PSC_ACCZ_FLTT = 40 value used in the flight shown.
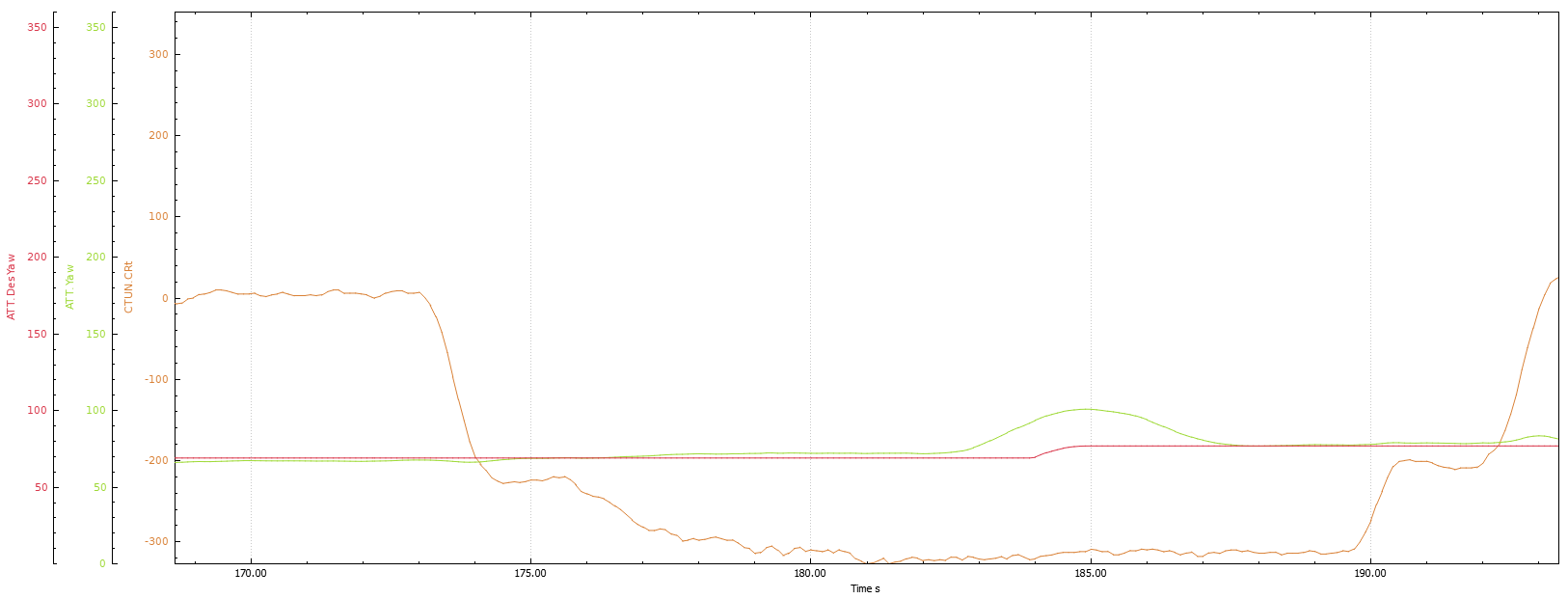
Another problem observed is, a bad yaw control when the drone descends very fast
So I took a look at the following parameters: I think some things changed here.
ATC_RAT_YAW_FLTD = 0
ATC_RAT_YAW_FLTE = 5
ATC_RAT_YAW_FLTT = 20
Tomorrow I will try to play with those values.
Hi @sergbokh,
When using the same tuning parameters as the previous version do you see the same issue?
Thanks all very much for the feedback. Remember to feel free to start a new topic and as always a dataflash log is really helpful when reporting issues.
Can you give me the parameters for 4.0.0 before you changed them?
Could everybody please NOT change their parameters after updating from 3.6.7.
The only thing that has changed that should impact the tune are the FLTT parameters. This parameter should only reduce the noise in the system so we do not expect it to change the tune.
We want to ensure that the parameter conversions are working correctly and we have not missed anything.
1 Like
Same issue hex also my Y-6B tends to drop a little in GPS lock like the video posted above. Normally not an issue. However i figured i just had not flown the Hex to get it used to the air temp. But it is dropping a tad worse when windy…
I am having an issue getting the copter to arm. On the ground control station it is telling me that the compass is not calibrated. I have posted before on the copter 4 thread but feal this is a better place for the discussion Compass Not Calibrated
Original Param Files
2019-10-26 13-54-06.log.param (15.6 KB)
After Upgrade to Version 4
2019-10-28 09-28-11.log.param (19.2 KB)
Update
Had a new CAM Here 2 GPS which I changed the switch to use Serial GPS and I2C and mounted on the copter and calibrated. The Copter now arms and is flying.
Hi rmackay9,
I try copter 4.0.0 rc1 and when try to activate the optical flow nothing appen.
Not working at all.
Tested with Matek f405 and cx-of sensor.
Could RM3100 support be included in 4.0.0?
It seems that the only missing part is probes for it.
Hello,
Thanks for your work.
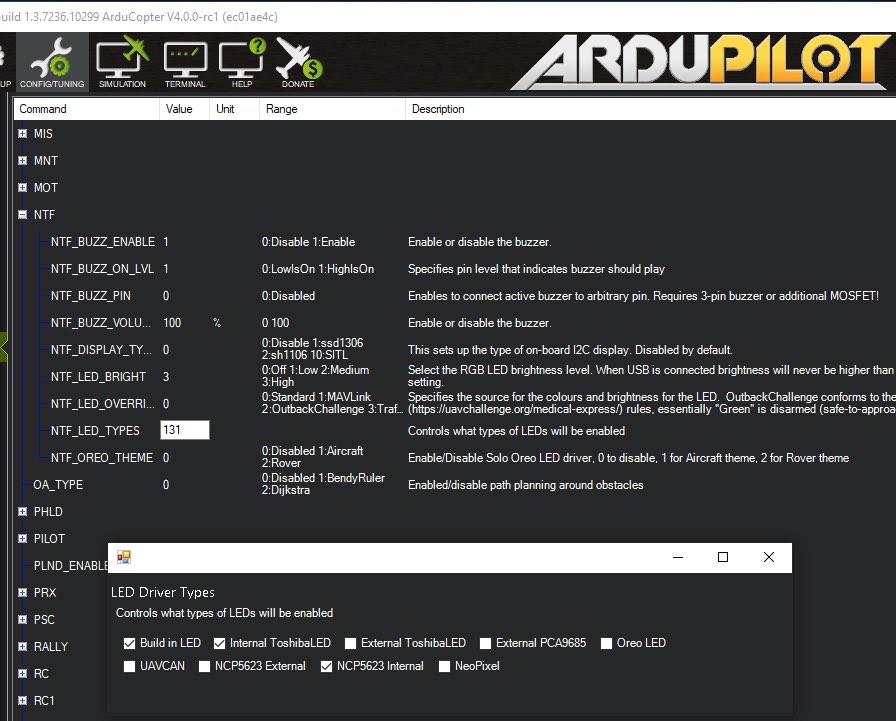
There is a Led problem with Navio2.
With the same settings, Led sequence is OK with 3.6.11, but Green Led goes OFF and stay off after initial boot sequence.

Can someone explain “StandBy mode for vehicles with multiple flight controllers”? I’ve been looking for a way to use 2 Pixhawks, one as primary and a backup in case the first fails. Is this possible? If so, how? Thanks
1 Like
This is a set of functions that allow external hardware to run an autopilot that is not actually in command without causing variable wind up that would cause a crash when that autopilot was put in charge. This also ensures the autopilot will not crash the aircraft if it is in charge when it thinks it is in standby.
This is the first step in facilitating work in multiple redundant flight controllers. At this stage all options I am aware of require separate hardware to mount multiple autopilots and switch between them. I am not aware of any hardware that is publicly available.
Am I reading this right. There is some roadmap towards redundant flight controllers. If so thats really cool.
Would be interesting to read how that would work.