Hi,
I’m new here and drones are new for me.
This discuss group is fantastic
I’m sorry for my english but i need your help.
I’m bulding prototype / innovation project for paraglirer. High-Powered Drone will be hooked on the back paraglider and using as standard motor (ppg) for towing to 300-400m, then will relase and going to home (RTL MODE).
I Know, its hard and dengerous topic but i make lot of tests, calculation etc.
I build model of it and it works !
I want to do it…
I’m sorry for very bad quality of this video.
beetween Flight Controller and ECS i added my controller - when flight as “paraglider drive” then all motors generated thrust proportional to my shifter position (signals from Flight controller are disconnected ) after relase is using FlightController for stabilization and RTL.
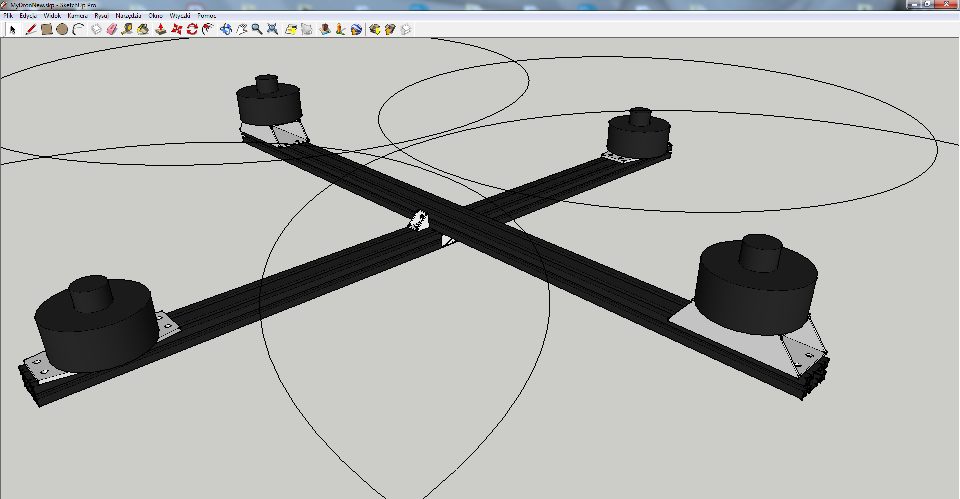
Now i’m building Full-Size 15kg drone with 60kg thrust.
ok, it’s was short description, now about my problem
I can use it as paraglider drive without problem,
I can use it as Drone with RTL without problem,
Critical moment is drone relase - Flight controller is arming on the ground in stabilize mode and disconnected from ESC. In the air after relase my controller gives back controll for FlightController.
Its working but not perfect as i need, problem is with PID Loops errors cumulation durring flight with disconnected Flight Controller. Then controller for a moment deepens the rotation and need time for stabilisation.
I saw Throw Mode in action and it’s very fantastic! I’s stabilisation without problems any rotation drones in very short time and do it perfectly.
I don’t any idea how i can use this algoritm in the air after relase drone from my back.
I think that the best way is suspend throw detection function until drop the drone.
But not sure if after arming on ground with throw mode i can fly away and it still will armed and remember home/GPS position for RTL MODE.
Copter 4.0.0-rc1 has what is described as “StandBy Mode”. Not any detail but from the Changelog:
6) Flight mode changes:
c) StandBy mode for vehicles with multiple flight controllers
If “unused” throw mode for long time after armed will be automaticly disarm like other modes ?
if i can arming in throw mode in home poit and armed copter move to second point ( away from first point on other height ) , throw and use RTL after that for Return To Lunch to first point (where was armed) ?
Thank You!
Only one question left - how suspend throw mode between armed and relase on 300m.
I’m worried that it might recognize my flight as a throw.
I can’t found description StandBy Mode.
There has not been a lot of reporting on Throw mode from dropping. If it’s the same as throwing upwards it has to reach a speed of 5m/s before it activates. So it should reach that in ~2m. I would test it by dropping from something. One of the Ardu devs threw it out an upper level window of a house and it worked.
There is no information yet on Standby Mode that I know of it’s very new.
i know that dropping mode it’s working properly but sometimes when i fly on paraglider are turbulence, i think that controller can it detected like dropped.
I can modification this parameters in source code but it not resolve my problem ;), big turbulence can be bigger than normal drop.
I think that one way is code modyfication - add waiting_loop to THROW (DROP) MODE.
but first i seek solution without ingerate to source code.
Or make it a true Flight Mode. Arduplane now has a Takeoff mode with several parameters that can be Configured. Auto takeoff used to require an Auto Mission to accomplish, now it’s a standard flight mode.
It’s my problem that it’s imposible - when controller want to control but can’t (because i controlling motors when i fly, not controller ) then PID Errors cumulation and stabilisation after throw is not good as i want.
I modyficated throw mode source.
Now i can suspend it from Radio chanel
by the way after Tuning PID - stabilisation in THROW mode works great !!!
my drone is harder for stabilisation because have packed proppelers on bottom of drone construction - all mass is above proppelers. Its flight “UpsideDown” but it’s works perfectly.

 but i need your help.
but i need your help.