This is a topic to cover @sergbokh’s report of loss of control during fast descents.
Flied several hours, no issues on my setup, except the yaw performance.
After succeeded autotune the yaw control was very, very relaxed, almost unusable.
I found that the ATC_ACCEL_Y_MAX was tuned down to 13000 while wiki says [9000 - very slow, 18000 - slow]
So I just copied my Yaw parameters from Copter3.6 params file and that generally fixed the problem.
But there is still sporadic issue when I descend quickly (ThrO is low) then vehicle losts it’s yaw control and turning left and right to a teens of degrees. I will double check my parameters one time but I don’t understand the root cause at moment.
@Leonardthall I did a full parameters reset after upgrade on 4. Then I did an autotune and it resulted in a good roll/pitch control, but not yaw. So I copied my 3.6 values that are related to yaw (PIDs, ATC_ACCEL_Y_MAX, ATC_ANG_YAW_P may be some, don’t remember exactly)
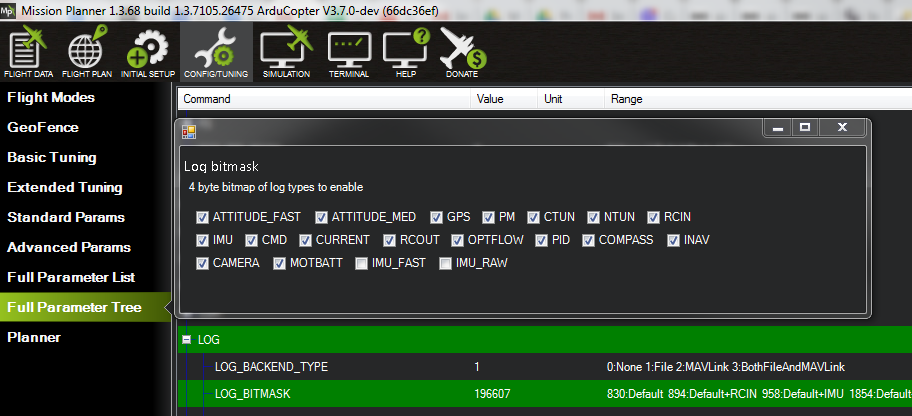
I will try to do the test flight tomorrow with logging settings you provided and upload log file.
Thanks!
Sorry I didn’t described completely. So after autotune the yaw response was very slow and the yaw started rotating at about 2 m/s descend. Then after I copied my 3.6 yaw params, this helped a lot, but I still observed uncommanded yaw rotation, but this time at 4-5 m/s descend.
That’s the strange thing. Two weeks ago I did a test upgrade from 3.6 to Master (no params reset, just a FW upgrade). And right on the first flight I noticed that something wrong with control. It looked like low P rate.
That’s why I started from a scratch today and did a full param reset and autotune.
Watching this closely. I also have unexplained yaw issues on a Cube Orange with RC1, but the issue existed with the pre-release orange code as well. This occurred after running auto-tune.
Trying to upload the bin file to start a topic but can’t get past 10%.
The aircraft originally had a Pixhawk 1 running AC 3.6 and flew quite well, so am reluctant to blame the frame/motor/prop/esc combination, and flew relatively well before autotune. I copied the basic PIDs from the AC3.6 tune.
I was also having Yaw issues with my Y-6-b that i not seen before. however i assumed it was a motor. the craft would rotate on it own 90 degrees then i would try to correct but it would act sloppy. I am going to be swapping the motor to see.
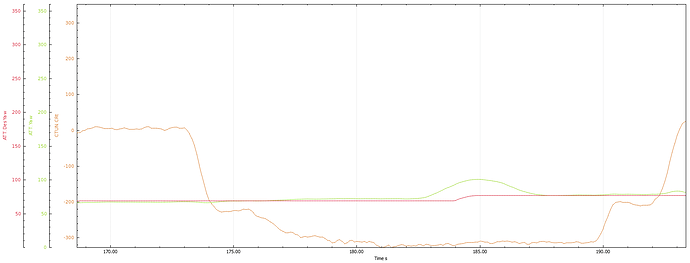
I loose yaw control several times during flight, but is most noticeable around 170000. The aircraft veers north several times as I attempt to fly west.
Basically the motor mixer had a mistake introduced when I added the thrust loss code. This reduced the maximum yaw output below what was available. So it only showed up in limited circumstances.