Sergey,
Great, thanks for the detailed info. We’ve reproduced and fixed the issue and this will go out with -rc12 in the next day or two. txs!
Sergey,
Great, thanks for the detailed info. We’ve reproduced and fixed the issue and this will go out with -rc12 in the next day or two. txs!
Tested 3.6 RC 11 nutx on Pixfalcon, (fmuv2), no issues.
Upgrade from 3.5.7 was seamless, all parameters carried over to the newversion.
Flight was all OK, we’re just toying with the new loiter settings.
The OLED display shows a couple more messages than before.
Battery failsafe worked as planned.
SmartRTL worked as planned
I think, there might be an issue with DShot:
On my quadcopter, I am using a servo for camera-tilt on PWM6.
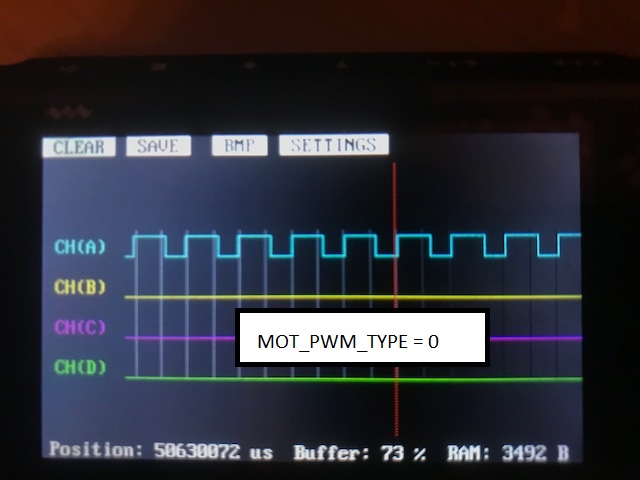
It works fine as long as I keep MOT_PWM_TYPE to 0.
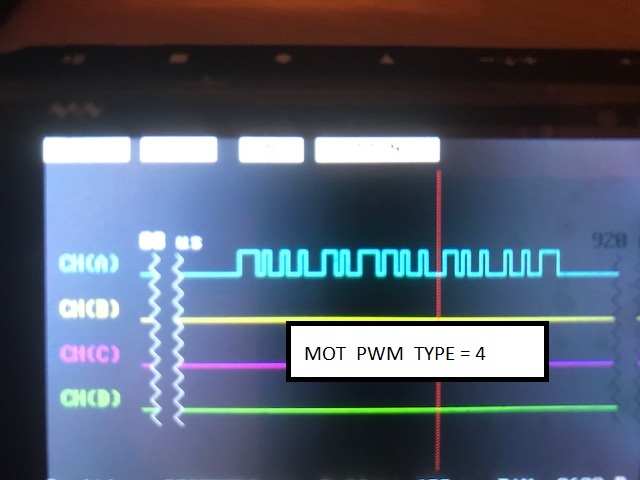
If I set this parameter to 4, the four motors run on DShot150, but the servo doesn’t work any more.
I checked with a logic analyzer and found out, the PWM pin of the servo runs DShot as well.
It seems like MOT_PWM_TYPE does not only affect the channels which are used for motors but all PWM channels.
Not sure if I am doing something wrong with configuration or it’s a bug. Any advice is highly appreciated.
Solved/ flight mode issue that I reported was that I was not using MP beta…
What flight controller are you using? Can you please provide a full set of parameters, or a log file.
I took the risk to fly a comprehensive Mission of 10 minutes with my TR600 Heli today.
The FC is the Pixhawk 2.1, Arducopter 3.6.0 rc11 chibios, (No Lidar Lite) HERE normal GPS and Sony X3000 camera.
ROI with different altitude up to 75m high. Flying sideways, was very smooth. After a big lop with different altitude a full RTL with Auto land. One of my best Missions so far. 3.6.rc11 worked great.
Thank you all.
Hi tridge,
I am using an Omnibus F4 V3 Pro.
Firmware is a modified one to add one UART as described here:
https://www.rcgroups.com/forums/showthread.php?3102183-Most-Integrated-Ardupilot-Flight-Controller-(ChiBios)/page19#post39970238
The servo is connected to PWM6. PWM5 is disabled to enable UART on the respective pins.
If I run the same firmware with only MOT_PWM_TYPE changed, this is what I see on the PWM6 pin:
Here’s the param file as requested. Please let me know if you need anything else to be tested!
Parameter_SW181005.param (16.4 KB)
The OmnibusF4 has PWM6 on the same timer as PWM1 and PWM2. This means they have to have the same output type. See:
You’d need to change the hwdef.dat to put PWM1 and PWM2 on a different timer. It looks like they could be moved to TIM3_CH3 and TIM3_CH4. Can you try this?
PB0 TIM3_CH3 TIM3 PWM(1) GPIO(26)
PB1 TIM3_CH4 TIM3 PWM(2) GPIO(27)
replace the PB0 and PB1 lines in the hwdef.dat with those and see if that helps.
Hi tridge,
thanks a lot for your investigations.
I implemented the changes in hwdef.dat and can confirm that the servo now works.
Unfortunately, after that change, motors A and B are not working any more.
I checked hwdef.dat and found that Timer3 is also used here:
PB4 TIM3_CH1 TIM3 GPIO(56) ALARM
For testing purposes, I removed this line and the motors are working again … at the cost of the buzzer, which is of course essentially needed.
Do you have other proposals as how to reshuffle the timer channels?
I guess the same issue applies also to other boards when people want to use DShot for motors and PWM for Servos at the same time.
can you try this instead:
PB0 TIM8_CH2N TIM8 PWM(1) GPIO(26)
PB1 TIM8_CH3N TIM8 PWM(2) GPIO(27)
Thanks again, tridge!
I tested with Timer8 and it works.
Don’t know why I’ve missed that option in the controller specification yesterday.
That solves my problem. Other users who use PWM5 for servo would still run into this issue:
It currently shares the timer with PWM3+4. Consequently, I propose to also move PWM5:
PB0 TIM8_CH2N TIM8 PWM(1) GPIO(26)
PB1 TIM8_CH3N TIM8 PWM(2) GPIO(27)
PA3 TIM2_CH4 TIM2 PWM(3) GPIO(17)
PA2 TIM2_CH3 TIM2 PWM(4) GPIO(16)
PA1 TIM5_CH2 TIM5 PWM(5) GPIO(15)
PA8 TIM1_CH1 TIM1 PWM(6) GPIO(41)
This way we can drive the first 4 ports with DShot while allowing the option to use normal PWM on the other two.
Would you kindly agree to create a pull request for this change?
You solved my problem. Thank You.
for me , everything works fine , on my home made Hexa, except that i can’t connect anymore to mission planner under Windows, i can under Linux.Where can we find the usb driver for windows?
Thank you.
Hi @francoisphil,
This sounds like an MP issue so perhaps raise it as an issue in the MP issues list? To be sure it’s not related to Copter-3.6 perhaps you could downgrade to 3.5.7 and see if the problem persists?
Its not a problem of MP,but driver “chibios” for windows , 3.5.7 worked fine.Where to find , and how to install?
And if i did not install MP under linux , i can’t downgrade anymore…
not sure I totally understand but if you’re using another groundstation that is not the Mission Planner, I think you should be able to download one of the firmwares from this directory and then upload it with another ground station. The firmwares in that directory are all NuttX builds for the pixhawk family of boards.
Most Pixhawks including the cube use the ArduCopter-v3.px4.
Pixracer boards use ArduCopter-v4.px4
Well , thank you for your answer , but i use Mission Planner , and windows is asking for a driver fmuV2 or v3 if i remember correctly.
I really don’t know what to do with these .px4 files, sorry…If i use Qgroundcontrol , the problem is the same , because windows does not find the usb driver.