I would like to use 2 telemetry devices on the pixhawk.
One like a short range 433 or 868 mhz radio and one 4G (LTE) like UAV MATRIX.
The reason is that we can use the short range Radio for take off and landing and the LTE for long range monitoring the flight. We cannot use only LTE because the connection is sometimes not reliable when we fly in remote areas.
Both solutions use serial RX/TX, 57600 baud. TX from pixhawk can go to RX on both without a problem, but TX from the units cannot be tight together to RX on the pixhawk.
This way we would have reliable control and Telemetry during take off and landing and can monitor the flight for long range, even when the connection is intermittent. It would also serve as redundancy in case 1 of the units would fail.
Thanks for your fast answer. That solution crossed my mind as well, I just wasn’t sure what happens if both radios send the same command, but the LTE with 200mSec delay. Will that be a problem?
Yes, I read that as well. But that will add a companion computer and a lot of complexity. I’m a fan of KIS, keep it simple.
I will give it a try on 2 serial ports and see what happens. Actually, we would only give commands in emergency situations. We’re flying large survey missions and for example we could fly into the rain. We just want to be able to give an RTL command or cut short on the mission by skipping some way points. Worse case scenario will be the command will be received twice.
Most of the time (almost always) we will be definitely out of the range of the short range radio, so the command will only be received by the LTE.
I’m just using 2 serial ports on the pixhawk. Very simple and straightforward. I also tried updating to the latest stable release. No difference. UDP (Telemetry 1) freezes up.
Yes, unbelievable. I did some more experiments today and noticed the pixhawk stops listening to serial 1 as soon as the other serial port is connected. It keeps on sending status messages, but doesn’t respond to any incoming message.
I also tried vice versa. So connect the secondary serial port first and then connect serial 1. Same result. Serial 1 keeps silent.
Thank you very much for your replies. I really appreciate. It simply blows my mind that something so simple doesn’t work. Am I the only one who would like to have redundant telemetry?
@Verloop ArduPilot can support several simultaneous mavlink connections for redundant control. I commonly have 2 links on my aircraft, and sometimes have 3.
The key to this is ground station support for multiple links. MissionPlanner is a bit limited for that, I use mavproxy for multi-link
I think MissionPlanner can do it though and what we need is a wiki update to show how.
ping @hwurzburg
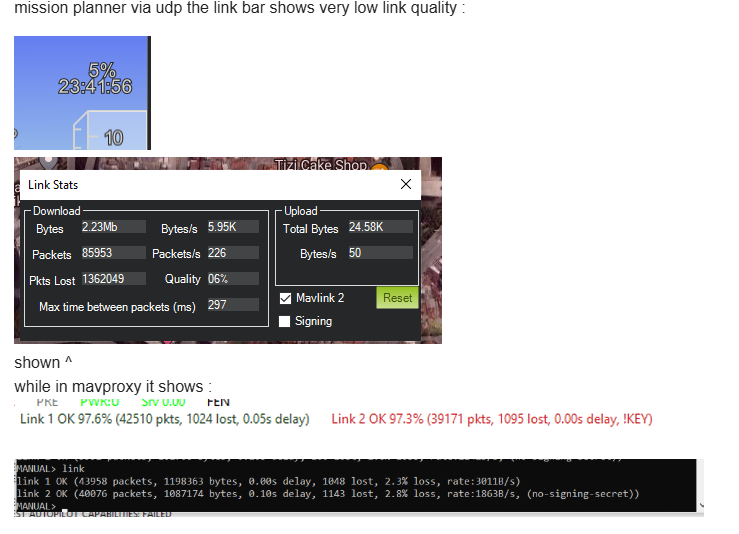
Today i had a try on using mavproxy link manager, everything works fine even switching between best telemetry link, however the problem that when connecting 2 telemetry links together the telemetry quality on mission planner is very low. it is necessary to have good telemetry reporting because the UAV is for long range hence telemetry quality will be used as distance limit indicator
According to a 2016 post by @meee1 “the underlying issue is that mavproxy is multiplexing the 2 streams together. anything received of that stream will show very poor/random sequence id’s.
MP can handle the streams as 2 separate streams, and will report correctly.
I don’t really see an answer to this issue as it stands at the moment.” has it been fixed in new releases of mavproxy? or still remain unsupported as for now? any idea on how to achieve “automatic switching” aside from using mavproxy if it cant suport this ?
as per using different sysid is it actually possible to change the telemetery link sysid? (As to my understanding this is set by the FCC it self)
the current configuration is using p9 and p4 modules from holybro :
i have also posted this issue in a different tread :