Special note about Y pin:
①This pin is the yaw mode selection port. It is active low and defaults to high (normal mode) at startup.
②When the drone is in yaw motion, it is recommended to pull down the Y pin to make the module enter yaw mode.
③When the sensor is not in yaw motion, pull the Y pin high to put the module into normal mode.
④If the module does not turn on yaw mode during yaw motion, it may cause jitter and drift. It can be improved after turning on the yaw mode.
⑤If the module is in yaw mode when the drone is not in yaw motion, the linearity of the module data may be deteriorated.
⑥ If you are not understand the above content, please ignore the Y pin,just think of it as nonexistent.
Do someone understand how could it be used with Ardupilot?
I have exactly that module and I have not connected Y. When I am rotating yaw the quadcopter has drift. How could I use it?
I also read this in the mission planner’s messages section.
08/03/2020 19:15:33: EKF2 IMU0 is using optical flow
08/03/2020 19:15:33: EKF2 IMU0 has stopped aiding
08/03/2020 19:15:28: EKF2 IMU0 is using optical flow
08/03/2020 19:15:28: EKF2 IMU0 has stopped aiding
it looks the same as aliexpress with the y pin for yaw mode. I can’t get good stability just with that sensor on my 3 "quad. I’m waiting for the VL53L1X to use it together with this sensor
Thanks. Can this be connected via UART? Or just I2C?
Kakute F7 has only 1 SDA/SCL port and it is intended for the GPS/Mag on my copter. I’m planning on buying the TFmini, but it’s too big and heavy for my micro Copter.
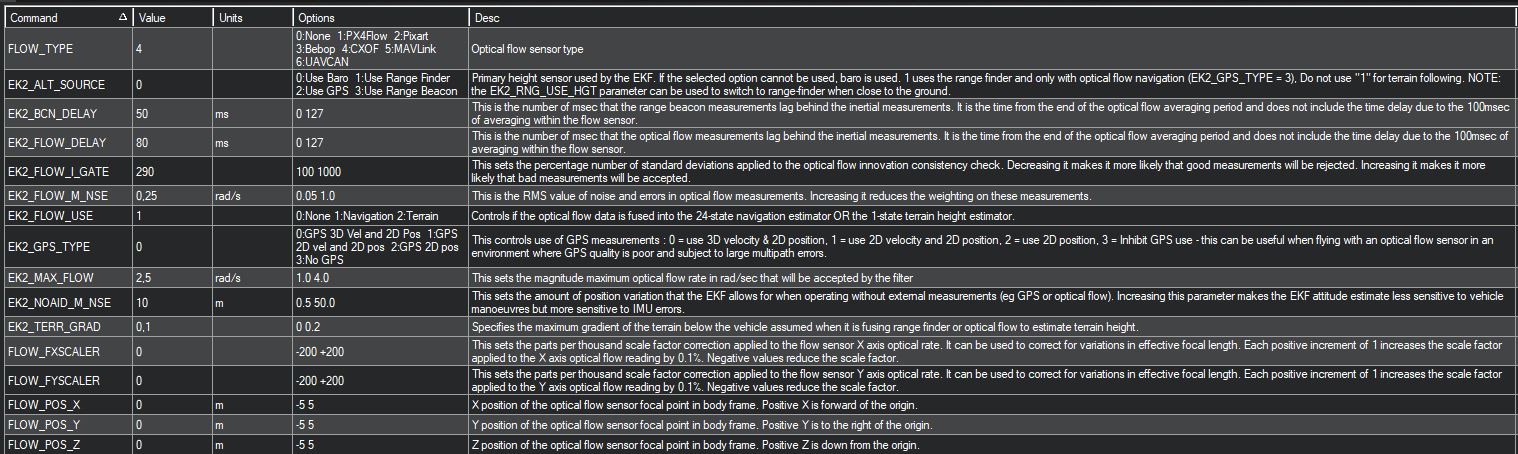
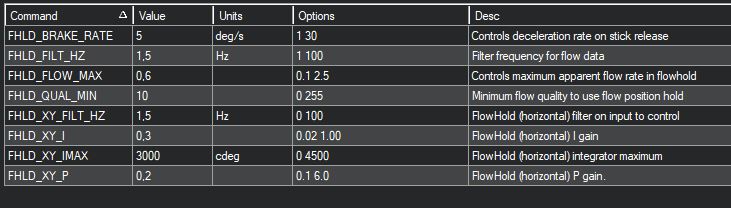
Hi, these are my settings for optical flow only (no lidar fc nano v6). With these settings I am getting good results in low light (sunset) or in indoor flights, but in full sunlight the optical flow sensor seems to be ignored. Can anyone indicate on which parameters to modify to have a good functioning in both light situations? Thanks!

 however according to the wiki it should go
however according to the wiki it should go