Hi all,
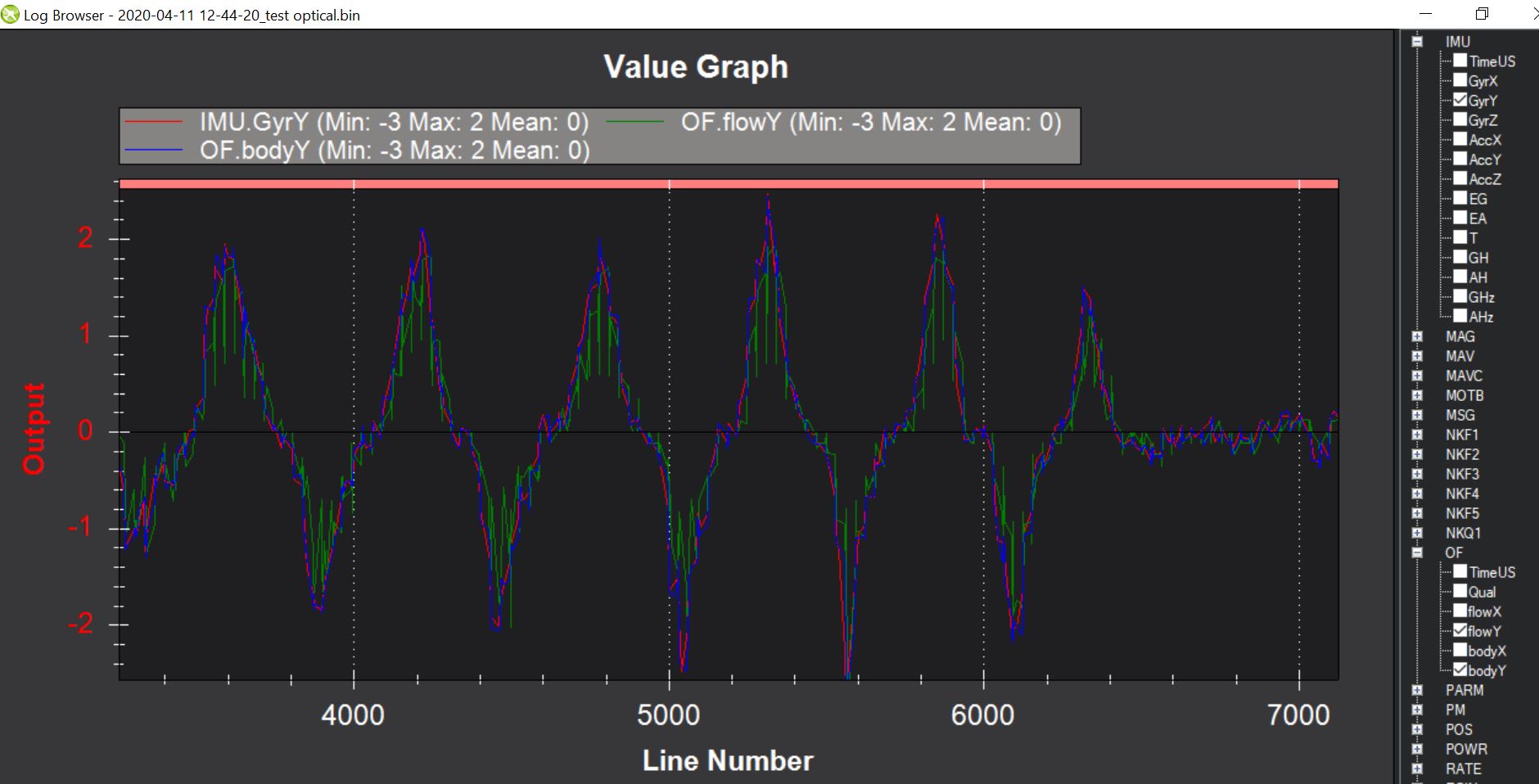
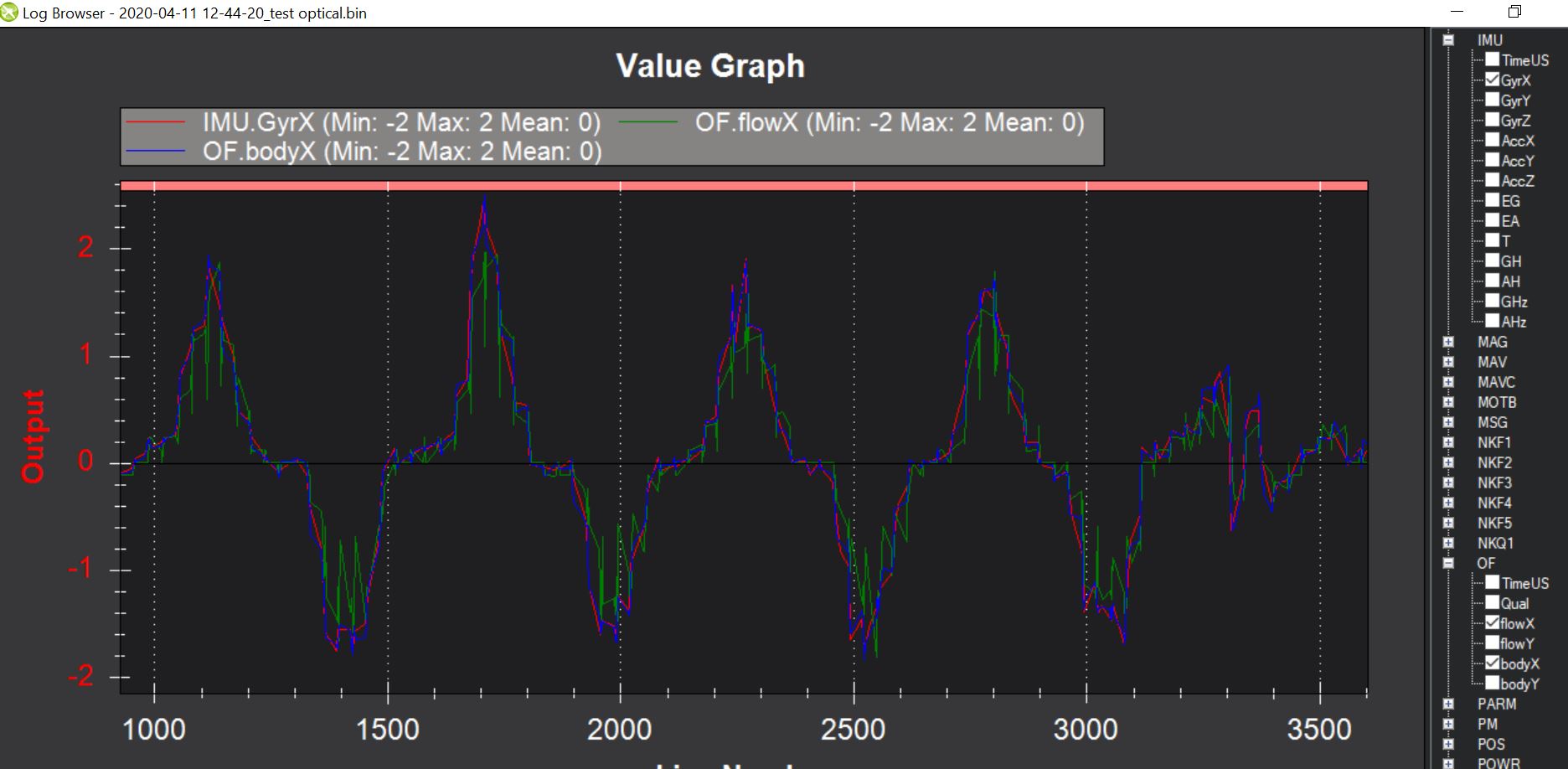
I’m trying to calibrate my optical flow sensor. I followed this part of the wiki and got these results. Can they be acceptable or can I improve something?
thanks!
https://ardupilot.org/copter/docs/common-px4flow-overview.html#calibrating-the-sensor