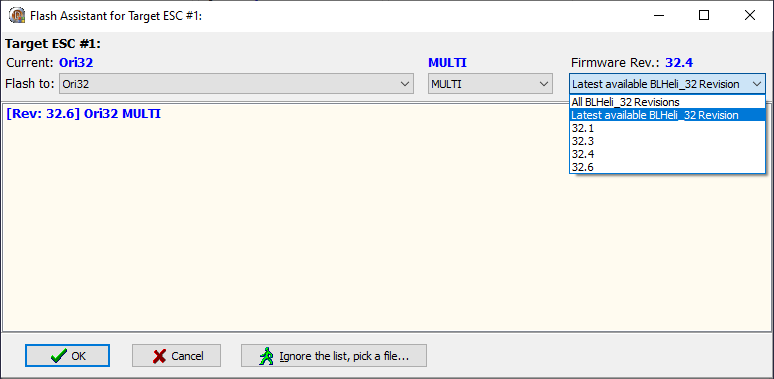
in the blhelisuite_32 you should see the dropdown on the right, and it offers all those versions. at least it should.
well, it is a flame war topic. i like tekko32, but, it is not bulletproof. nothing is bulletproof, all escs can burn.
it also depends upon format.
if you`re making a larger model - my recommendation is to use kakute f7 AIO and use discrete separate ESC modules, not the 4in1 brick.
for models we talked about here - small and ultrasmall - -there was never much choice at all. there was only 1 controller to use with 20x20 mount format - omnibus nano v6, and it usually was paired with Ori32 25A esc. not reliable at all, and not perfect, but, nano v6 worked very well with it. now we have this new great kakute f7 mini - it is a new best thing for small models.
usual culprit and an additional complexity was to find ESC that actually works with 2S lipos at min voltage. that i did not do myself much, as i did not make any 1 or 2 S models, i only played with fast ones - 3S and 4S.
i used those:
http://www.holybro.com/product/tekko32-f3-esc-35a/
http://www.holybro.com/product/tekko32-f3-4in1-40a-esc/
out of 4in1 ones i had 4 of them, one of them burned out. 3 others are fine. single ones never had issues. of ‘kotleta’ ones i have no clue, not sure what is the benefit, if any, i like F3 based ones better.
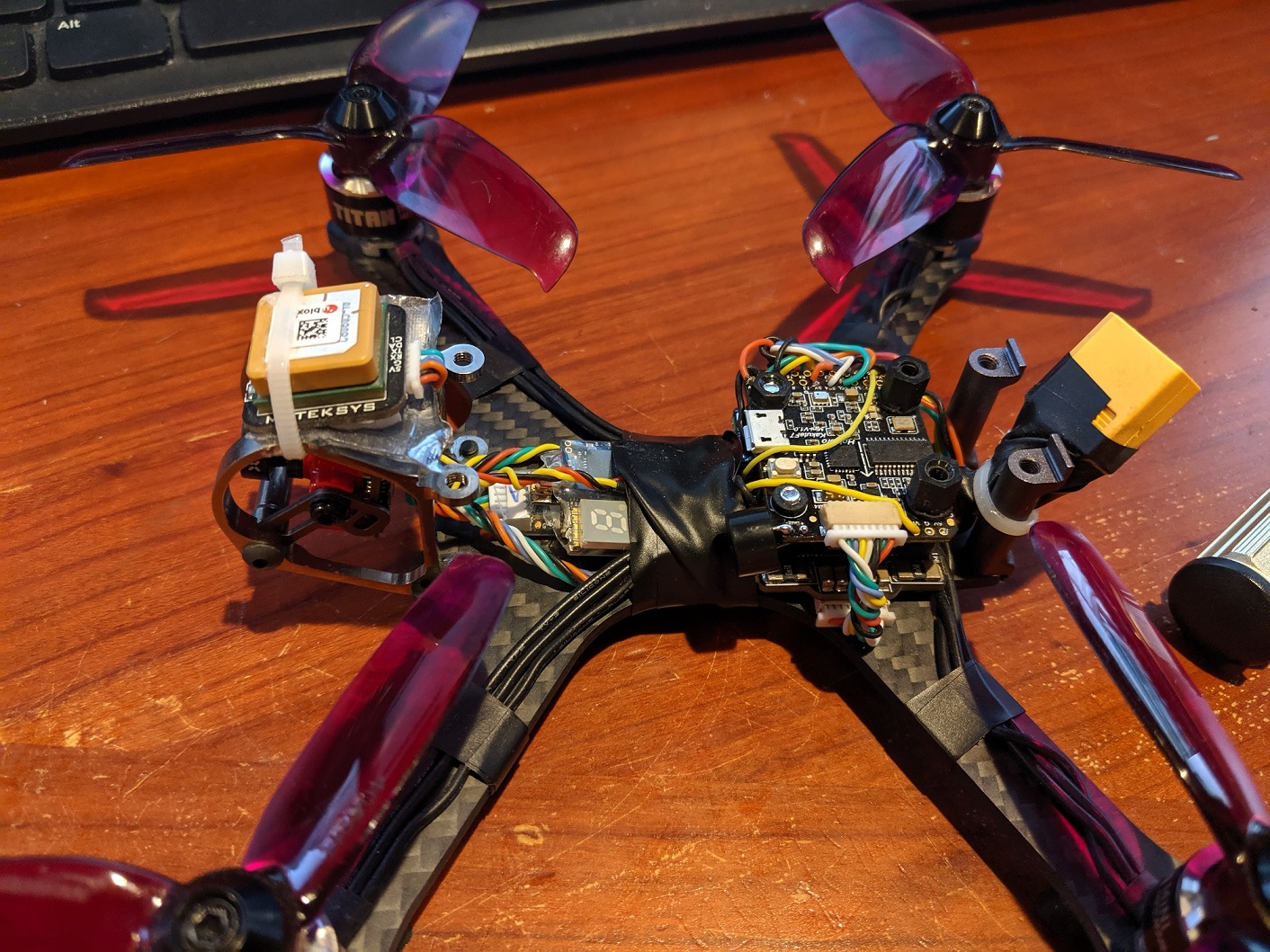
that`s a big one, here is what i just did today - transplanted kakute mini into this one, my current favorite, gecko 4".
it flies on 4S 850mha, quite stupidly overpowered, and a lot of fun. may be worth swapping ESC on that one from 25A to 45A, but, will see. those motors i think max out at 12A or 8A, but, i just do not like Ori32 that is in there - it lies about current badly and shows voltage as .2V lower than real. not the end of the world, but, annoying.
Hi,
could you please post export of all params from the 3" model where that ESC driven harmonic filter is enabled? it would help to have a reference to see what all options are supposed to be set to.
i just flew my 4" model with the kakute mini - it suffers from spike of vibrations at high speeds, 3" was not like that at all. i want to try this notch filter prior to tuning it.
set up BLHeli telemetry and make sure you have the number of poles set correctly. Then set:
INS_HNTCH_REF = 1
INS_HNTCH_MODE = 3
INS_HNTCH_ATT = 30
INS_HNTCH_BW = 50
INS_HNTCH_FREQ = lowest frequency you want to cover (e.g 100)
The defaults for ATT and BW are also probably ok, but for your size copter the above might be better.
does the INS_NOTCH_ENABLE 0 0:Disabled 1:Enabled Enable notch filter
also needs to be set to 1?
also, for the “set up BLHeli telemetry and make sure you have the number of poles set correctly” - is there a step by step guide for this, what is actually meant by ‘number of poles set correctly’? number of poles is set to ‘auto’ in blheli32 esc configs. there is nothing in there for telemetry parameters
Number of poles refers to the number of arms on the stator.
At least that’s what I think… Because the magnets can also be referred to as poles… I’m using the stator number, but maybe we need clarification.
well, i am perfectly aware of how many poles my motors have. i do not follow where/how it is expected to be set for this new feature and what are the exact blheli related pre-reqs for this thing to work. and how it can be confirmed if it works or not.
it is in the master now, i pulled it and compiled, flashed - i do not see much of a difference from how it flew before - so i suspect it is not working, probably. but not sure how to confirm.
i suspect there is more in some non-obvious settings for that to actually work, as i do have esc telem flow getting for sure, get the current/voltage from it - but MP never shows me any data in its interface for any of ESC telem channels. go figure.
I think he means this parameter:
SERVO_BLH_POLES
But, if the default is 14, that’s actually the magnet number, not the stator number.
I want to try this soo bad! I’ve got my copter loaded w/ the new firmware, but have been to busy to test it.
So, I don’t have any more info for you… I’ll wait for others to reply…
MP doesn’t show me any data either in most places… But it’s in the logs… I know it’s working. (not the whole filter thing, but BLH telemetry is working for me)
well, there is one more monkey wrench thrown in here.
most recent master somehow broke the logging in the kakute f7 mini. it no longer capable to see and download logs - it worked for sure using previous compile. what the heck… 
will try to update MP now but i do not think it is MP, it is probably the new master. nope, no use. still gives same error -
Getting list of log files…
Error:System.TimeoutException: Timeout on read - GetLogEntry
at MissionPlanner.MAVLinkInterface.GetLogEntry(UInt16 startno, UInt16 endno)
at MissionPlanner.MAVLinkInterface.GetLogList()
at MissionPlanner.Log.LogDownloadMavLink.b__12_0()
so, error is normal if there are no log files on the device. with this new compile logs are no longer created. damn.
Hmmn, that’s weird - log download was all working for me yesterday on my branch. Not tried the latest master. I know @tridge made some kind of SPI change, maybe that is responsible? You could try my branch instead - it’s based off 4.0rc2?
Yes you need to set SERVO_BLH_POLES correctly. 14 is the default for most motors so I am lead to believe but on my F20’s it’s 12 - it’s the 12P in the 9N12P configuration
It’s not necessary to set INS_NOTCH_* at all, just the parameters above.
BLHeli setup is here but if you are seeing reasonable RPM values then you are probably ok. Note that I do see rpm values in MP.
it is code for sure. i have 2 models now with this kakute - just flashed other one with this last compile, and it stopped making logs in the same way. pity.
that link above is not very helpful - it has a lot of info in there, but, does not say antyhing of what actually to do, imho. i looked at it before, and it is set - like i said before, i still do not understand why some people do see data in the MP for all thise ESC vlaues in the ‘status’ window and i never see anything other than 0 in there. but, i do get RP in the log - so, it should work. but, now without logs it is in the stalemate again.
Be worth trying the latest Copter-4.0 branch as that does not have all of master
does it have this new harmonic notch filter in it?
Yes. It has all the changes you need apart from the DMA fix for Kakaute Mini. My branch is the same but has the DMA fix and my FFT PR. Be good to know what is causing the issue regardless.
i suspect this new master code somehow ruined both my kakute f7 minis. i did regression from master back to the code i had - so, none worked. then flashed original code i compiled on 10/17th - one that worked, and, alas, still no logs. not sure yet what to look at.
Ouch, that’s nasty! Has your configuration changed at all?
Hey @Paul_Atkin1 I’ve just tried with my KakuteF7Mini and my small copter branch (basically 4.0rc2) and all is fine - I can create and download logs just fine. Please double check that you have:
LOG_DISARMED = 0
LOG_BACKEND_TYPE = 4
These are my current blheli settings:

i have same settings for log - post whole file here i will compare with mine.
only alteration i have in my hwdef file - i did set all UARTS to NODMA. how is yours set?
so, what i saw yesterday - it makes files fine if there is a file already there. if you go and clear all logs - it stops making new files. i tried it with both log_disarmed and without. with a build from 10/17th (or earlier) it seems to more reliable but i managed to make it miss couple of times also on that earlier build. if i repeat logs clear command several times on the earlier code it eventually starts making logs again. with current master it seems to be getting stuck always, no matter how many clear log commands i give.