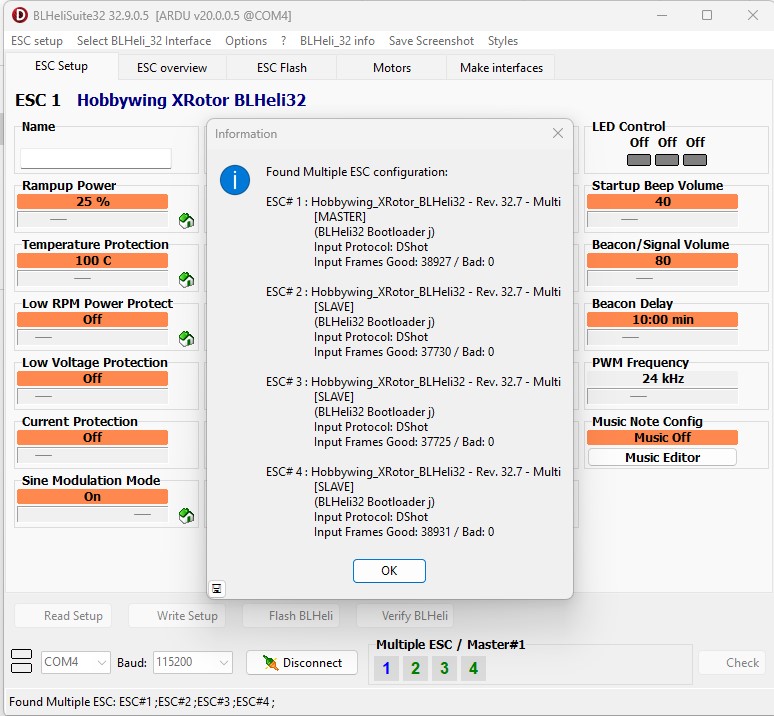
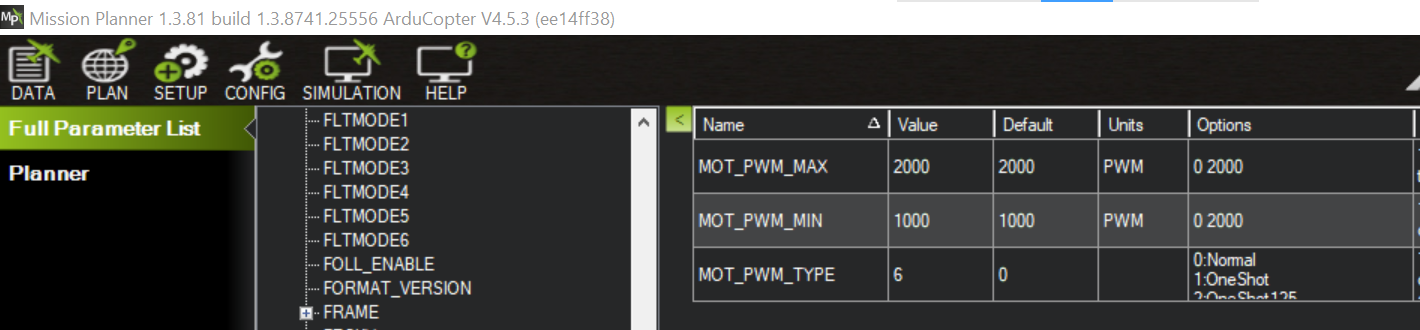
yes, confirmed set to 6. 4th time using this digital ESC.
oh, okay, I see. thanks.
Then I don’t understand why there’s any effect at all when using different Minimum/Maximum Throttle values. Is it reliably reproducible?
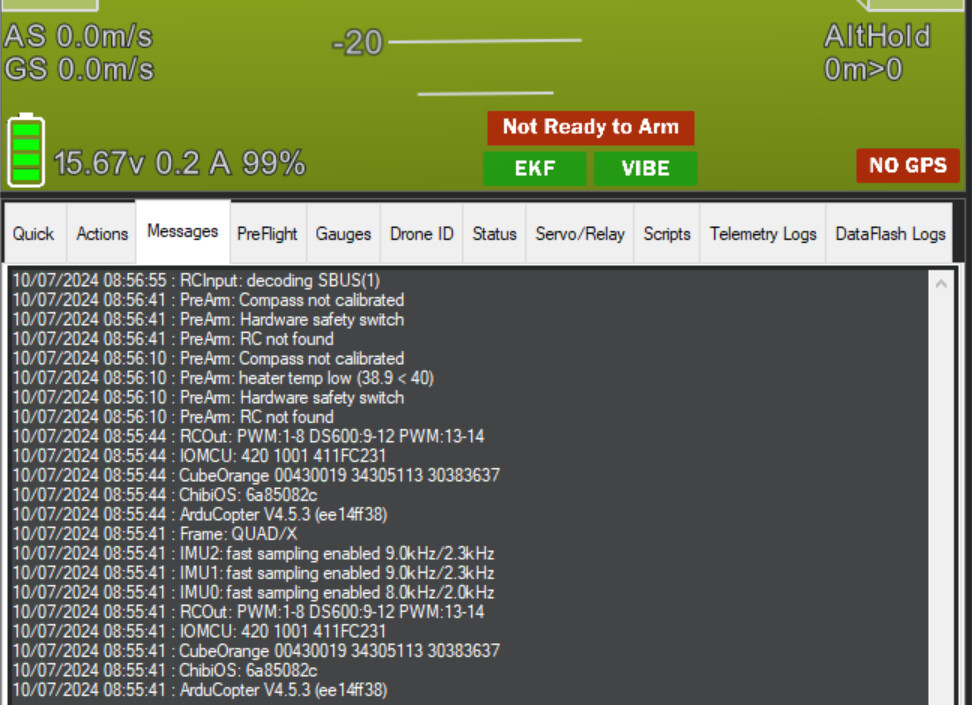
Do you have something like this in Messages:
RCOut: PWM:1-8 DS600:9-14
No, today I tried to set it back to 1100-1940 again, Motor test at 1% throttle, same as yesterday’s 1040-1960 behavior. previously I have not done a motor test at 95% throttle. after setting 1040-1960, then I did the 95% motor test throttle.
Yes.
I think I wouldn’t worry about it then, as long as you don’t notice other abnormal behavior. You could try setting very high values just to test and see if there’s any noticable difference (without props attached of course). But it really shouldn’t have any effect as long as DShot is used.
Is it the referring to the same thing?
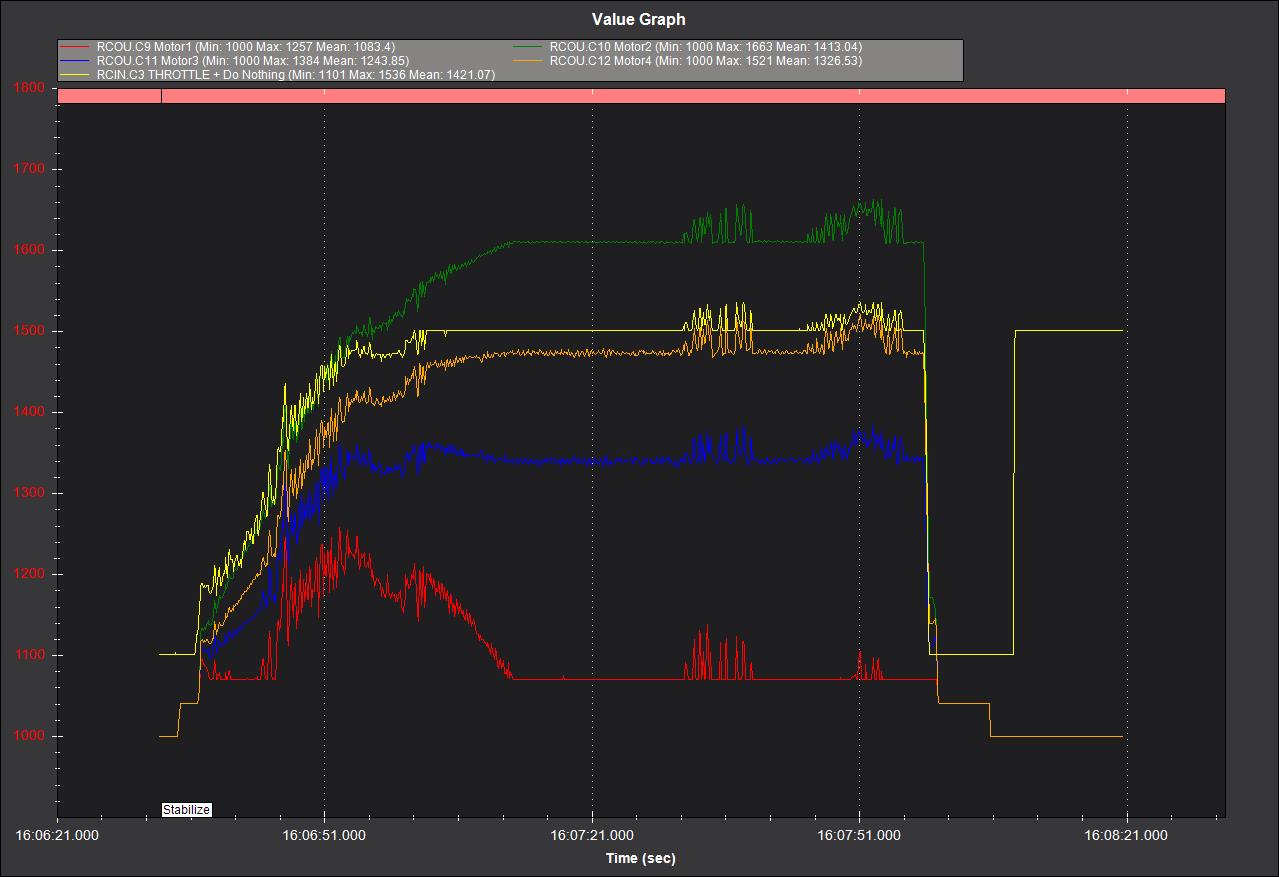
this RCOU.C9-C12 does not look comfortable to me.
Sometimes M4, sometimes M1 will spin much lower than the rest of the three. there will be one motor spin slower from the rest.
I have added these settings as well.
ATC_RAT_PIT_SMAX,25
ATC_RAT_RLL_SMAX,25
ATC_RAT_YAW_SMAX,25
PSC_ACCZ_SMAX,25
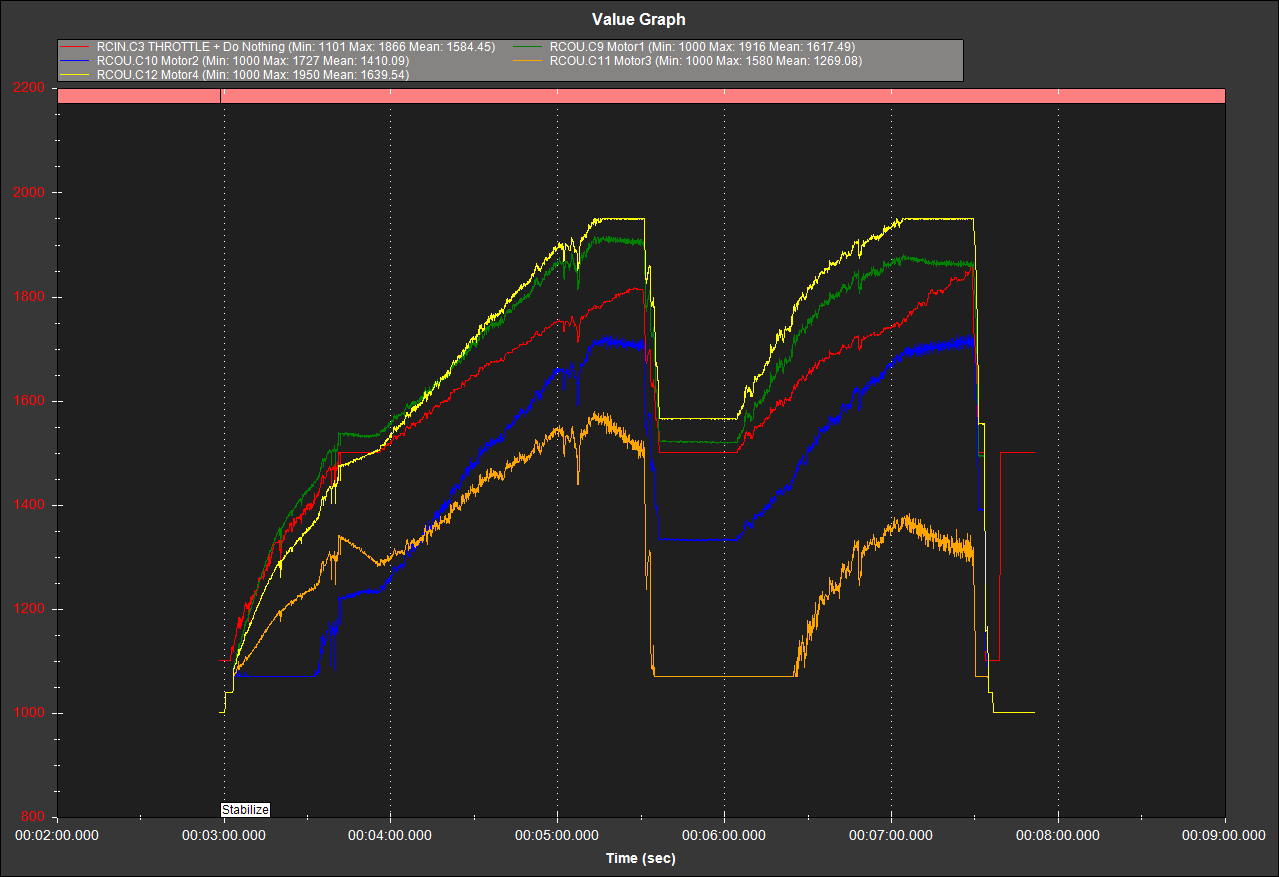
Does anyone know why the Throttle stick at 1866, the drone still did not lift a mm? drone weight is 1.7 Kg, and each arm is 425g, 4S power.
Do I need to up the Thrust Expo or Thrust hover value for Stabilize flight mode?
looks like I need to up the Thrust Expo towards 0.99 same as MN2806.
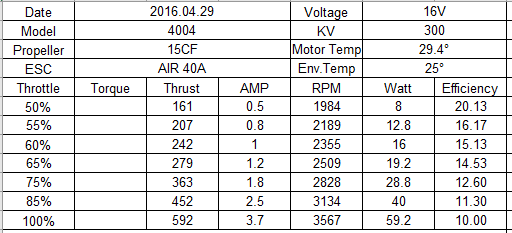
T-Motor MN4004 KV300
ESC configuration.
Log file.
MOT_THST_EXPO,0.69
MOT_THST_HOVER,0.2
RC3_DZ,30
RC3_MAX,1901
RC3_MIN,1101
[Edit]
with a 15" propeller under a 4S battery, the max thrust is only 592g, 13" propeller my guess is it is likely to be 392g. So under the 4S battery, the anti-gravity Motor becomes a rock.
392*4/2.4 = 653g max hover thrust.
…
You need 6S power and still lose a bit of weight w/ 15" props.
No choice, move back to MN2806 KV650 + 13" propeller + Hobbywing 4in1 digital ESC.
If the PMU measurement is correct, 192W for 1.62kg.
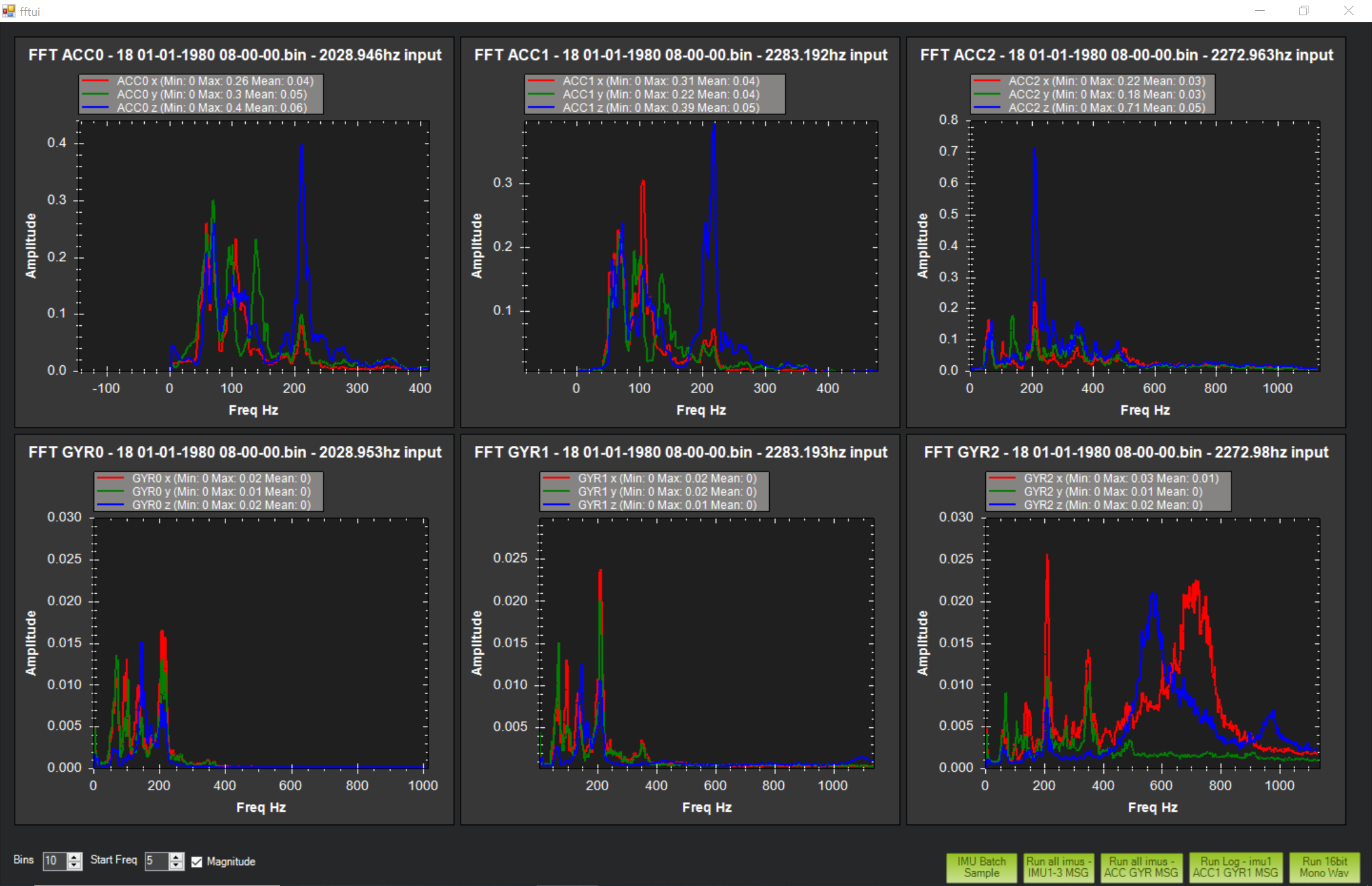
I got multiple peaks in the noise, does anyone know what setting is the best for the Harmonic Notch filter?
log.
You dont have ESC RPM data, so use these FFT settings:
FFT_ENABLE,1
FFT_MINHZ,30
FFT_MAXHZ,200
FFT_NUM_FRAMES,2
FFT_HMNC_PEAK,2
FFT_WINDOW_SIZE,128
INS_ACCEL_FILTER,15
INS_HNTCH_ENABLE,1
INS_HNTCH_MODE,4
INS_HNTCH_FREQ,40
INS_HNTCH_BW,20
INS_HNTCH_FM_RAT,1
INS_HNTCH_REF,1
INS_HNTCH_OPTS,2
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
Using the ESC RPM would be good, and also the ESC data is good for monitoring temperature and more.
You are using the wrong analysis tool.
Filter Review Tool
And you would be best off configuring for Bdshot and using that for the Notch filter reference.
Any reason why 1 and not 7?
Logging on one IMU is sufficient to configure the notch filter. Unless one IMU is incredibly more sensitive than others, then no need to log them all - even then you would probably just need to log the sensitive IMU and not the others.
@xfacta
@dkemxr
Appreciate the response and guidance. I believe this drone is ready for a quick tune or Autotune. both noise and vibrations are low. How is INS_ACCEL_FILTER derived to 15 for this case?
12/8/2024 9:20:27 am : FFT: calibrated 2.0KHz/7.8Hz/187.5Hz
12/8/2024 9:20:10 am : EKF3 IMU0 MAG0 initial yaw alignment complete
12/8/2024 9:20:10 am : EKF3 IMU2 MAG0 initial yaw alignment complete
12/8/2024 9:20:10 am : EKF3 IMU1 MAG0 initial yaw alignment complete
12/8/2024 9:20:10 am : EKF3 IMU2 tilt alignment complete
12/8/2024 9:20:10 am : EKF3 IMU1 tilt alignment complete
12/8/2024 9:20:10 am : EKF3 IMU0 tilt alignment complete
12/8/2024 9:20:08 am : EKF primary changed:1
12/8/2024 9:20:08 am : AHRS: EKF3 active
12/8/2024 9:20:08 am : EKF3 IMU2 initialised
12/8/2024 9:20:08 am : EKF3 IMU1 initialised
12/8/2024 9:20:08 am : EKF3 IMU0 initialised
12/8/2024 9:20:07 am : RC10: MotorEStop HIGH
12/8/2024 9:20:06 am : GPS 1: specified as DroneCAN1-125
12/8/2024 9:20:06 am : RCOut: PWM:1-8 DS600:9-12 PWM:13-14
12/8/2024 9:20:06 am : AHRS: DCM active
12/8/2024 9:20:06 am : ArduPilot Ready
12/8/2024 9:20:06 am : INS: alloc 6144 bytes for ISB (free=604152)
12/8/2024 9:20:06 am : Barometer 2 calibration complete
12/8/2024 9:20:06 am : Barometer 1 calibration complete
12/8/2024 9:20:04 am : Calibrating barometer
12/8/2024 9:20:03 am : Initialising ArduPilot
I think I was checking in your logging of noise.
You can try 15, or 10 is the new default, but either is safe.
Can you guide your thoughts on why FFT is needed in this case? I notice the configurator and I have not used it in the past. I believe is due to the mode you have selected for me.
You could just as easily use throttle-based notch filtering, it’s easy to set up.
I think in-flight FFT is better for copters that have a suitable flight controller with plenty of spare capacity and might be using different payloads, or no payload, at different times.
@Hacky This user could benefit from your ArduPilot Methodic Configurator template with FFT-based Notch settings.
How is that progressing?
@amilcarlucas I think, my large 24" build with KV230 motors at 6S is not really comparable to @Jai.GAY 's copter regarding the relevant frequencies, so my FFT parameters may not be helpful for him. But nevertheless, my strategy to find suitable parameters may help also here. It is documented beginning at How to methodically configure and tune any ArduCopter - #282 by Hacky
Reagarding earlier posts in this thread:
I would be careful with lowering the “ramp up” power parameter and I think this is not the right one to address desynch problems. From my experience I can tell, that too low ramp up power settings may result in limits at the upper end of the throttle range, so you may run into a situation, where you cannot use the full motor power anymore (like limiting the throttle to e.g. 70%).
There may be particular motors, which do not play well together with BLHeli_32 ESCs, but desynchs can also have other reasons (e.g. to large / too heave propellers (too much inertial mass)). You could try to lower the acceleration (by adjusting the “maximum acceleration” parameter) but you should test that on a bench first and you should use that parameter only, if you are 100% aware of what you are doing.