I also have a question regarding setting the notch filter frequency.
For my build (a 6S quadrotor with 24" props and Pixhawk 6X), the initially “guessed” parameters were:
INS_GYRO_FILTER: 20 Hz
INS_HNTCH_FREQ: 28 Hz
INS_HNTCH_BW: 20 Hz
INS_HNTCH_ATT: 20 dB
INS_HNTCH_REF: 1
INS_HNTCH_FM_RAT: 1
INS_HNTCH_HMNCS: 1
I set the INS_HNTCH_MODE to 4 (Dynamic FFT) because I am using T-Motor ESCs that do not provide RPM.
When I upload the .bin log from the first flight to the filter review web tool, I see this diagram:
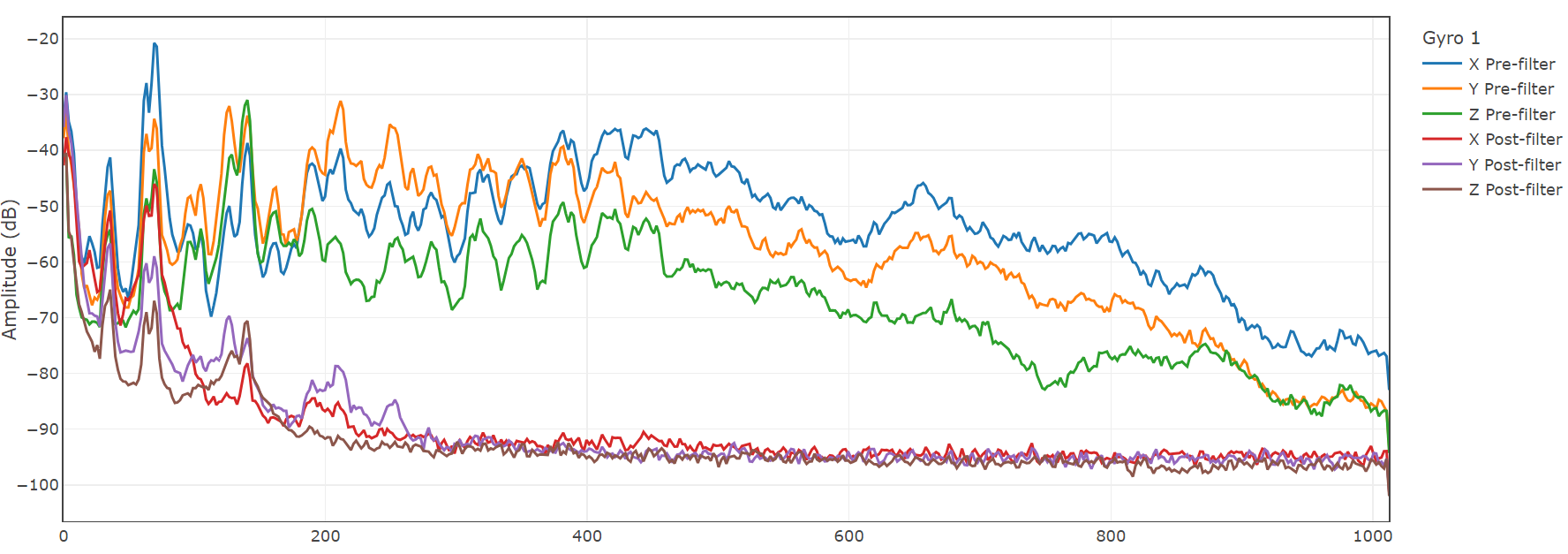
A first peek is visible at 35.6 Hz and the next is at 69.22 Hz which is the highest.
The recommendation says, the INS_HNTCH_FREQ should be set to the highest peak (at 69 Hz) but as I think, my highest peak is already the first harmonic, I think it makes more sense to set it to 35 Hz.
When I set
INS_HNTCH_FREQ: 35 Hz
INS_HNTCH_ATT: 30 dB
INS_HNTCH_HMNCS: 3
I get the following graph. For simplicity, I switched off the curves for Y and Z and actived the estimated post-filtering and the notch tracking:

It surprises me, that the notch centers are shown at around 200, 400 and 600 Hz with a very wide bandwidth. So, the effect on the peaks is quite little.
What am I doing wrong here?
You can find the bin log from the first flight here: