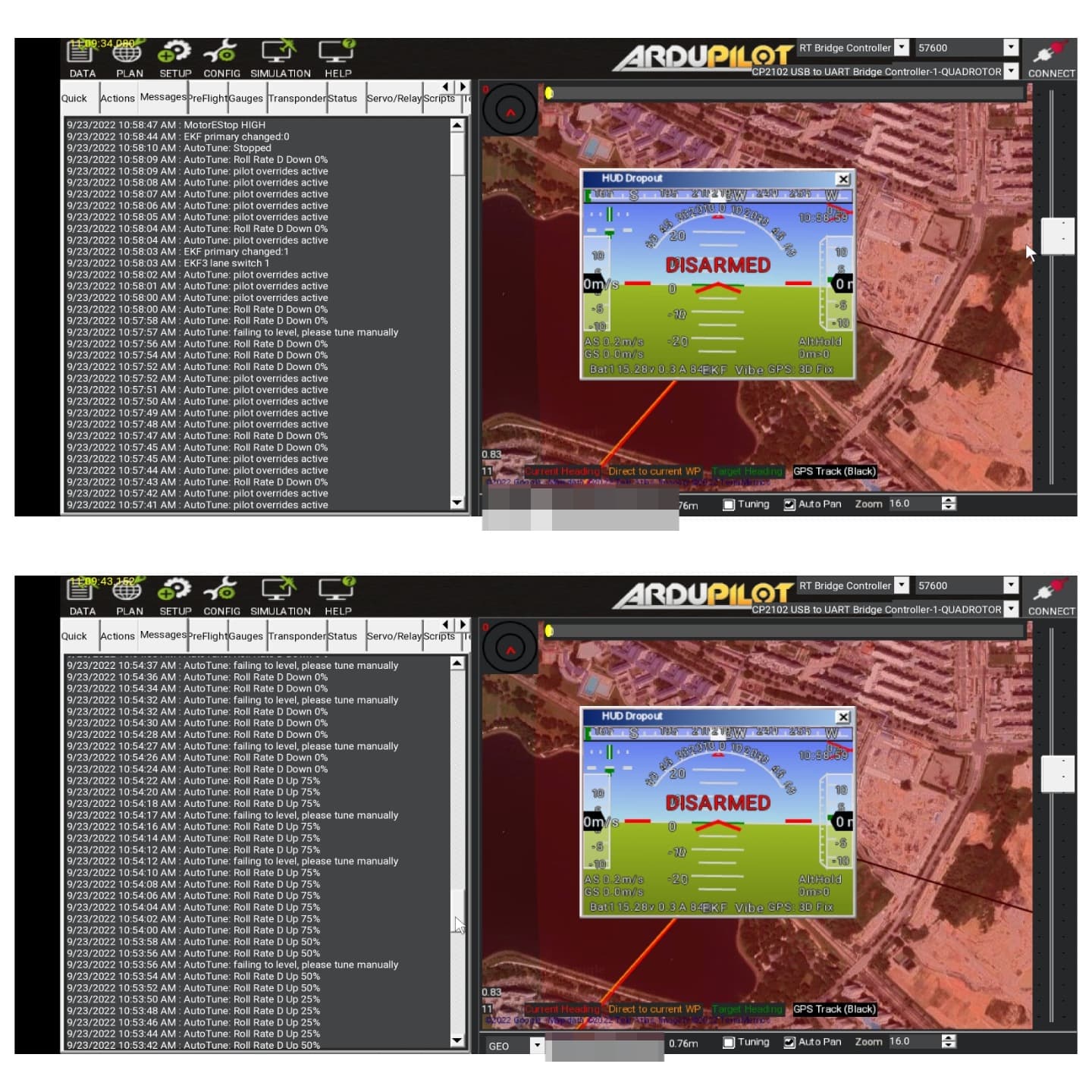
I don’t quite get it, it started when I lowered the default PID by 50%. Then it stopped and started to prompt the pilot to manual tune. No different if I turn off the INS_HNTCH_ENABLE.
The default initial parameters and lowered values are both flyable and only noticeable a slight height drop when pitch and roll. No oscillation so call.
4.2.3 firmware.
I am now suspecting MOT_THST_EXPO with the digital ESC and the motor. Many T-Motor users pointed out very linear motor curves.
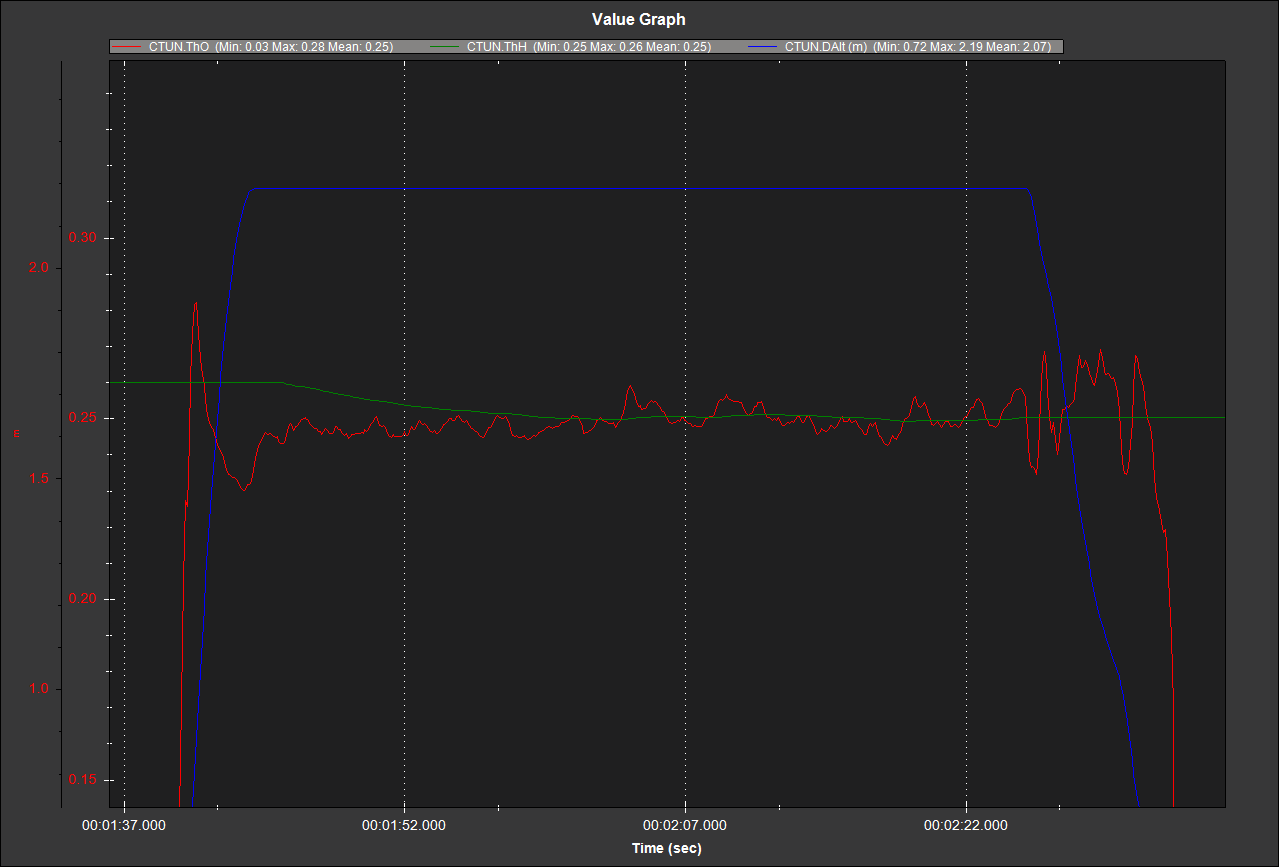
after changing thst_expo from 0.66 to 0.99, I got a recommended thst_hover value of 0.2503457. I hope the autotune starts and works next, finger-cross.