Good evening.
Can anyone point me to an article or video that explains how to setup BL-heli 32 for low vk motors suchs as kv530
Good evening.
Can anyone point me to an article or video that explains how to setup BL-heli 32 for low vk motors suchs as kv530
Yes
Leave everything at defaults and set these:
I also set these, but they are optional
Avoid changing Timing or anything related - leave it on Auto and let BLHELI do what it was designed to do.
Also in later versions of Ardupilot firmware the motor reversal can be done in parameters
SERVO_BLH_RVMASK
so you can do all your wiring neatly and dont need to swap wires or even do BLHELI passthrough to change the BLHELI settings
So not a link to an article, but I and others have been using these settings for a long time with a very wide range of motors. I’ve used 910KV and 390KV motors with heavy payloads and lots of wind disturbance, as examples.
@ktrussell and I have nearly identical quadcopters with 700kV motors. Shawn’s recommended settings have worked well. I leave the ramp up power at 50% for this particular copter, and it works great.
Admittedly, I’m more of a Rover user, but following the advice of @xfacta and @dkemxr has never steered me wrong.
Thank you very much everyone. Much respect for answering
Also on the PWM Frequency high use “By RPM”
Make sure motor timing is “auto” it’s not always set to this by default
Hey guys,
I am using 400kv motors and a tmotor V50 4in1 ESC with 13 inch props but I cannot get rid of desyncs. Rapid rampup of throttle from 0-100% causes a desync (note the terrible sound on the vid) I have used the exact same settings as adviced here, as well as experimented with various others.
I’ve never had such issues before even when running 22in props. But its the first time using a 4in1 for this size copter.
Notee: It’s much more severe when the battery is full.
Is this it a case of a bad esc? @xfacta @andyp1per
I dont belive that esc is blheli, its a tmotor esc and they do their own thing by needing motor specific firmware on their high end parts but im not sure how they handle their 4 in 1 escs.
It’s definately blheli32, I’m changing settings with the configurator and flashed them with the 32.9 fw
What would those be? I pretty much use default settings for everything. PWM frequency high by RPM on some of them would be about it.
I tried default and only changing the PWM high to “by rpm” similar behavior. The settings that the above vid was filmed with was : Timing auto, PWM high to RPM, LOW RPM : OFF, Startup power 50% and the rest default. Still nothing so I am changing the ESC now
What Dshot protocol?
Got a screenshot of your BLHELI settings?
Have you got a good capacitor on the battery input of that ESC? If so what is it?
I have set it to DShot 600
I don’t have the copter with me at the moment but the settings are pretty much what I mentioned above, I have also tried experimenting with manual timing high and low, demag comp. And more. Nothing seems to fix it completely. I can send a screenshot in a few hours.
I have a 440uf capacitor on the 4in1 ESC pads (came with the ESC I assume it’s low ESR) and a 500something thats installed in the holybro power module.
Do you think I should add more capacitors ? I didn’t think this could cause desync issues especially since this happens even when testing one motor.
Update: I have installed 3000uf of total capacitors. So capacitors are not the issue.
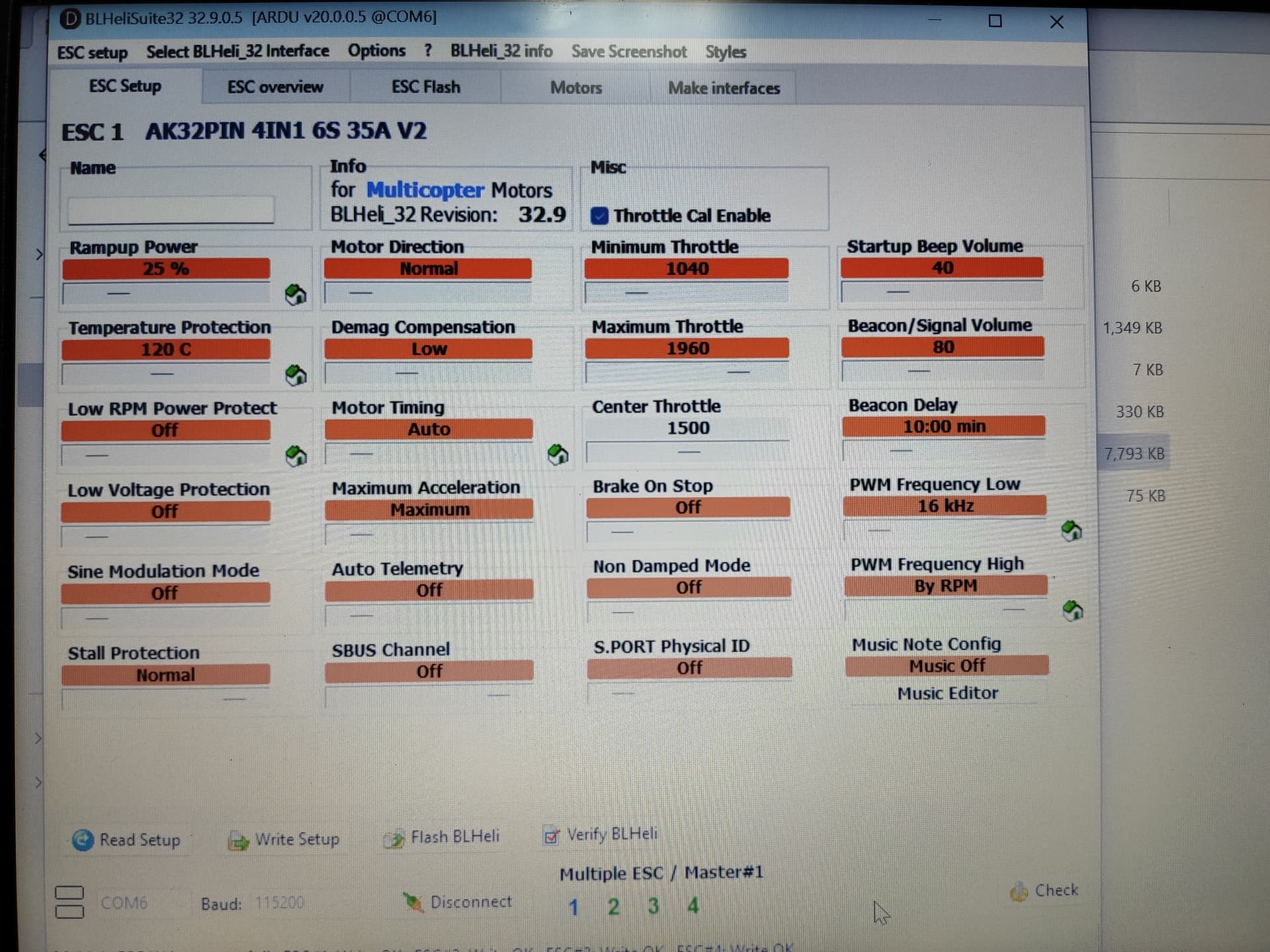
I have changed the ESC to an Aikon 35A v2
And the behavior is exactly the same, 0-100% will result in desyncs
Here are my settings:
I have that same ESC. The only configuration difference is Rampup power is at default (50%).
I’ve never tried such a test, 0% → 100% throttle.
In reality the worst case scenario is going to be MOT_SPIN_MIN to MOT_SPIN_MAX
which equates to about 10% → 95%
Also can you check with Sine Modulation enabled. I think this will lock you out from changing the PWM frequencies. I’m curious to see if it’s any different, and also I dont have anything set up where I can test at the moment.
EDIT:
I’ve always used Sine Modulation, but I’ve also only ever used what most would consider LowKV motors.
We’ve experienced extended flight times (up to 50 mins) and excessive payloads that were beyond expected limits - Never yet had a desync with a BLHELI32 ESC.
Yes, agree. I would suggest just continuing on with the setup/configuration. As I mentioned I have used default parameters (except for low RPM Power Protect off on low kV) from 320kV to 3800kV and the desync bogeyman has never arisen in-flight. I have forced it to happen on the bench at Dshot1200 and madly jerking the throttle but that doesn’t count for anything. Think about what the motor can actually do with a prop mass attached…
Tried 10-95% Again almost guaranteed desync…
Even 80-95% is desync ! However 0-90% seems to be ok, It looks like it happens only when trying to reach over 90.
I am trying to be extra safe because I already had the first desync in flight after 12 years ! (Last time that happened we were using turnigy plush escs with SimonK)
I cannot trust it still.
I’m out of ideas at the moment… Only thing left would be trying a different motor at same kv. .
As for sine modulation : Tested it and seems to be slightly worse.
@dkemxr That’s a first for me too… Have you by any chance used the same motors? Tmotor 4004 400kv?
Are you certain you’re actually using DSHOT? I’ve experienced poor motor behavior when accidentally allowing the autopilot to revert to PWM output (though I’m not sure I’d characterize it as desyncing).