Thank you for the rsv param, I know it, is for that I always arm and take off in stabilize mode. I will change runup_time param to 30sec before the next flight.
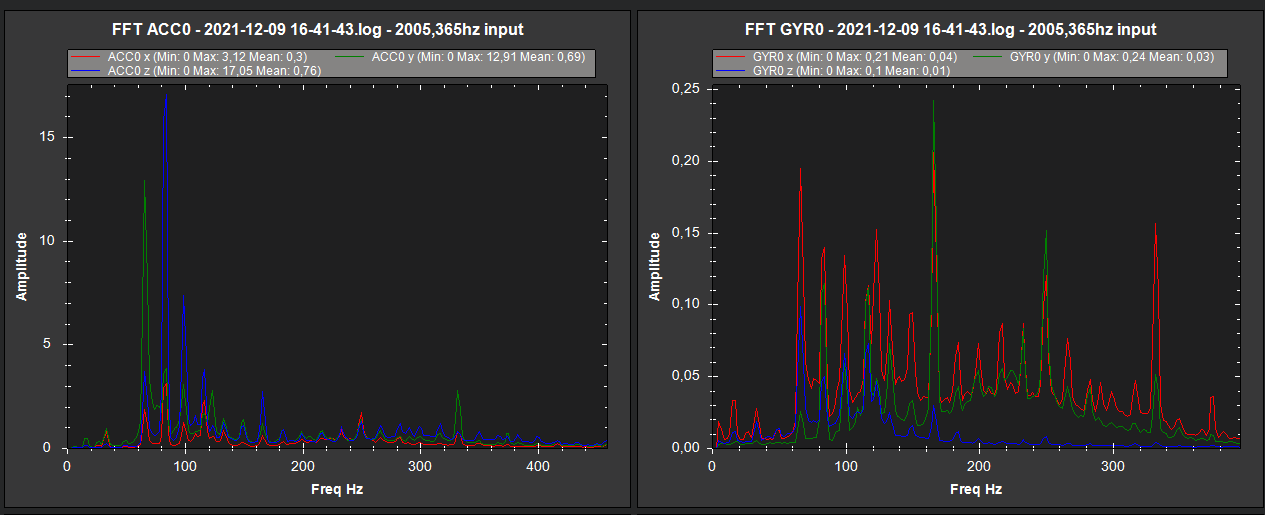
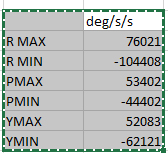
About harmonics heli is 2 blades rotor with 3 blades tail rotor.
First I set harmonics to 1,2,4 as marked in the heli tune guide, but with that setup, looking in flight vibe levels near 30 and lookinf fft i saw many more powered levels of vibration in front of the 4,5,6 harmonics.
For that I set the hnotch to 4,5,6 and result in lower vibration levels (below 15) in flight.
I will retry with 2,4,5 for check.
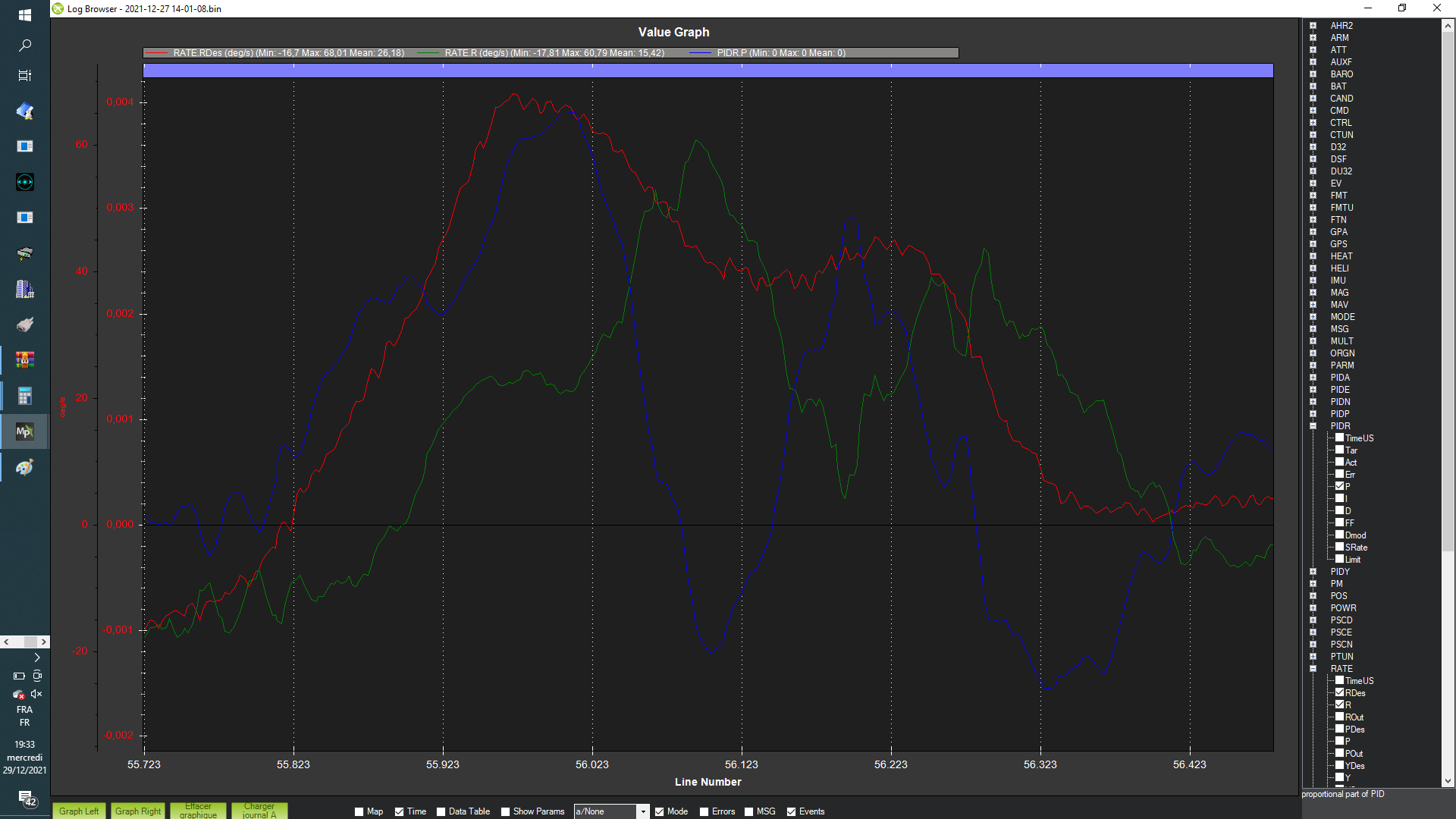
Regarding the atc_input _tc is realy dificult to find the good value. Please look at strang behavior I have with yaw.
I have constant 4 - 5 hz oscillations. I set rate d and p gain at there maximum to try to get more precise yaw.
Also increasing atc rate accel yaw max to big value (much more than tail rotor can give) reduced the amplitude of theses oscilations…
seems to me that there is 180 deg phasing that lead to this issue.
How to resolve it? This can be due to atc input tc 0,2 ?
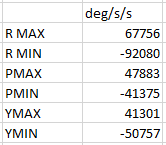
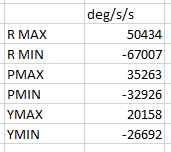
About accel logs revelated that on roll I get 1050deg/s/s and pitch I get 450deg/s/s.
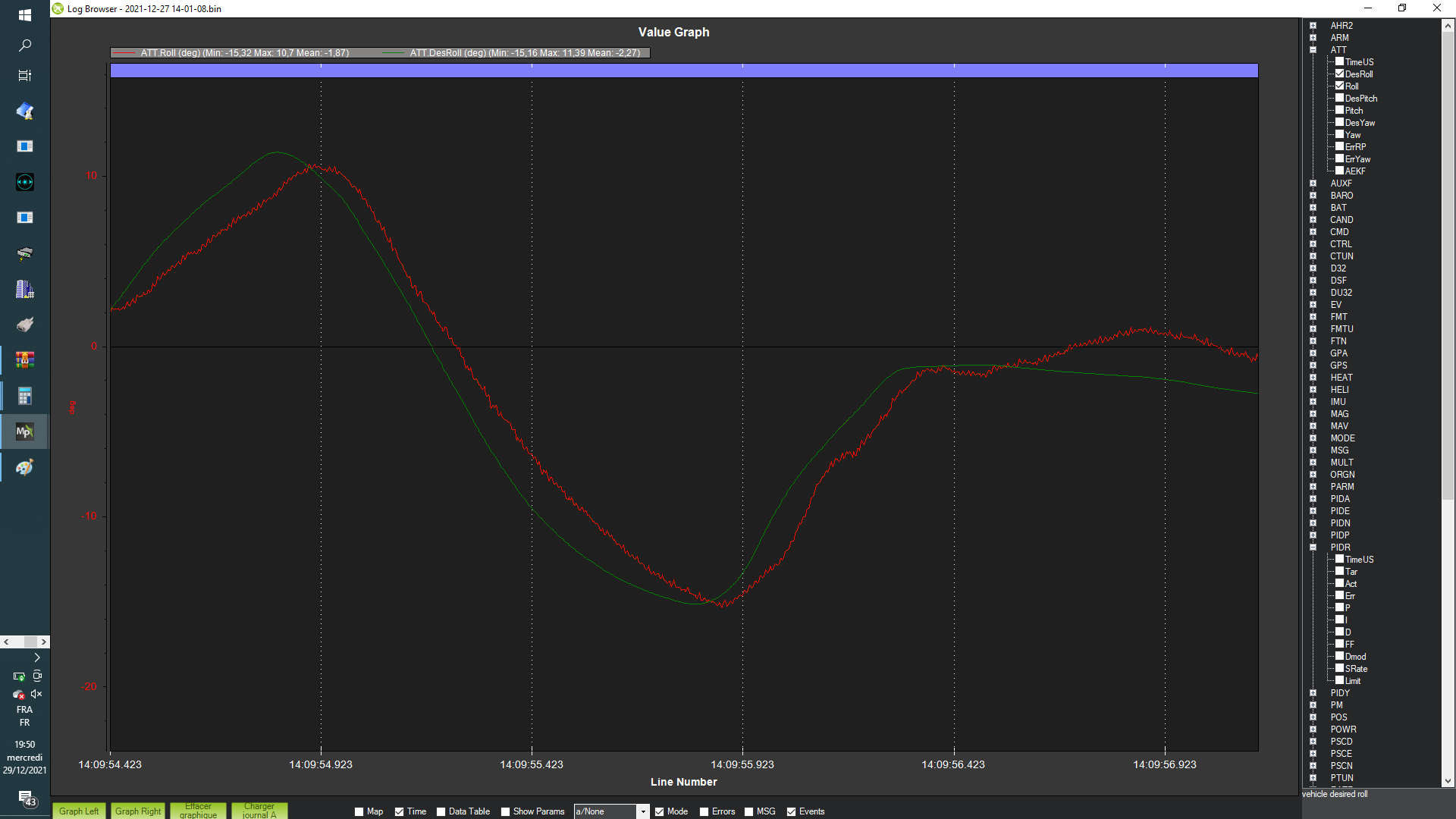
Idem as for yaw, to get more precise behavior I needed to push atc accel pit/roll max above what this heli can do, resulting in flyable heli, but far from I want achieve in terms of attitude. Also D and P are tuned as explained on the guide. Vff also are tuned as explained.
I suspect all this was caused by bad atc_input tc for this heli
Looking logs I don’t find the value… can you please help me and tell me whitch value you can determine looking my log?