Sorry for the flood of messages, I really hope to get this project off the ground soon. I have made progress, I found where the baud settings are in Tera Term and I set it correctly and I now see ascii plain text!
The drone however doesn’t. I will double check settings and such and will report back.
Hello there, If you are using Ardupilot firmware 3.6 or later version, then dont change it to PixMode otherwise it will not work.
Please change it back to standard mode if firmware is V3.6.2 or higher one.
5A 05 05 01 65 (change to standard format)
5A 04 11 6F (save settings)
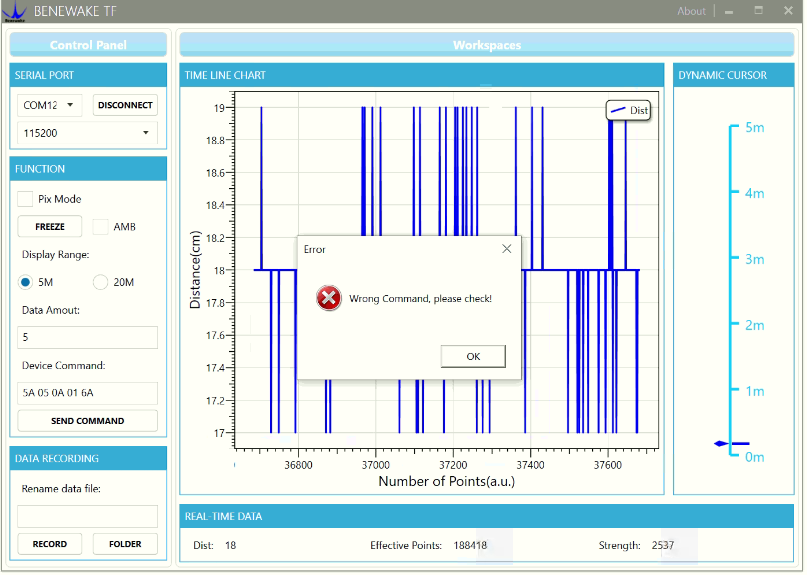
If you want to observe the data of PixMode while you are in UART mode, I share serial port utility, you can try this.
Link: https://we.tl/t-L4OLwqqAe6
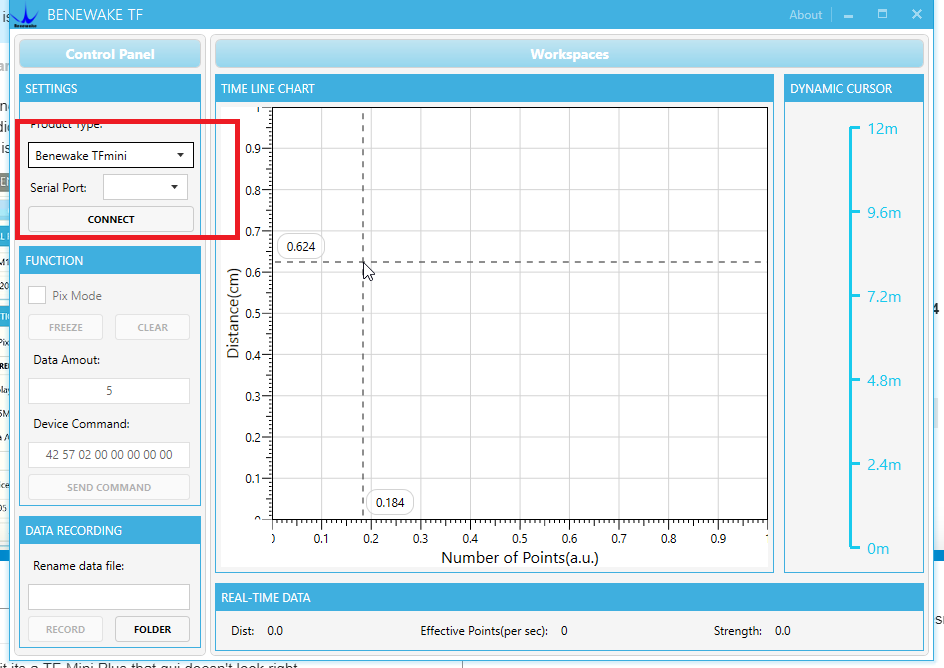
Anyone know of a way to determine what version of TF mini this is.
I found it in a parts bin, it had no connector on the end and I corrected that. It appears to be working as a UART version. Wa hooooo…but is it a mini plus or not.
Thank you for the quikc response.
I have another attached to a different copter and I know this is a TF Mini Plus as I just bought it and it’s a different serial number. then what you reference this is why I was asking.
Thanks. I downloaded new software. I have converted to I2C mode.
How can I fall back to UART? It seems I2C mode is not working…
I am getting the address from 01 to 7E for I2C scan!
Hi @snoozer@rickyg32, I am currently trying to configure a TFmini S LiDar with Arducopter 4.0.3 in a Navio2 with raspberry pi 4. I am using the commands abbove to communicate via I2C but no success. I use i2cset -y 1 0x10 0x5a 0x50 0x0a 0x00 0x69 i and an error is returned. Error: write failed. Has someone experienced this issue? . I need some help here to get this LiDar working.
I have left the quadcopter last year when the winter season came closer. I did not have the time yet to get back into it. My issue was now a long time ago. IDK how Ardupilot has changed in the meanwhile and I also have not spend any time on the Lidar since. Until I get back into the flow of things I doubt I can give you any Information beneficial to you. If I recall right after having solved the problem switching between UART and I2C for the lidar I was unable to use the lidar on the same I2C bus as other devices. But as mentioned, thats is now ages ago, IDK how things are with current Ardupilot etc.
I know this thread is rather old, but it actually helped me to switch my TFmini-s into IC2 mode, which works extremely much better for me on my Arduino project, than the standard mode. Since I didn’t find any steps to switch the modes with an Arduino setup, here what I did:



 . I need some help here to get this LiDar working.
. I need some help here to get this LiDar working.