Thanks for your kind reply !
I’ve tried the items you pointed out, but unfortunately they didn’t cure the problem.
So I read ardupilot discourse a little more thoroughly and found someone in the same situation as me at the following link.
I followed ibrahim’s instructions here and sent the command and was able to read the sonar range value successfully on the misson planner!
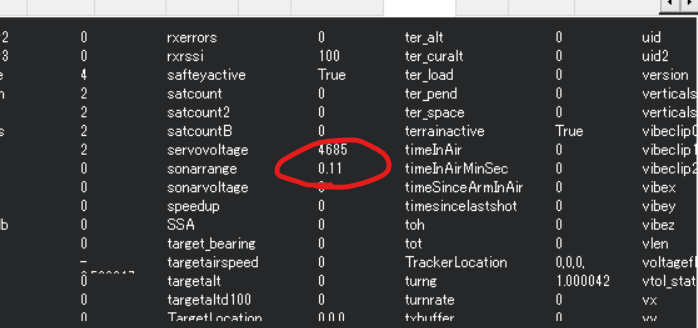
I have a question again, but the relative altitude values that I can see in QGC etc. do not match the distance sensor values, even though the sonar range values are changing.When I was using px4, they matched. Is this an ardupilot specification?
I would like to use the distance sensor value as the relative altitude in the range where the distance sensor is readable because I cannot rely on the GPS altitude estimation.