Just a quick introduction to start. My name is Jan and I live in the south-west of Ireland. I have a Holybro X500 kit with Pixhawk4 and have been flying for a few weeks now including a couple non fatal crashes. I have added a FPV cam, OSD, OLED Display and RFD868 Telemetry. Latest addition now is the TFmini-S Lidar. I use mainly 3D printed parts for mounting everything to the frame. I use a Jumper T16 TX and a Jumper R8 receiver incl Telemetry for the Yappu Scripts on the X500.
I have recently received the Benewake TFmini-S. I have purchased that one in particular because of its I2C capability. It comes by default as UART device and it works fine on my Pixhawk4 and Arducopter as type 20 (Benewake TFmini/Plus-Serial). I have read through the documentation and find no way to get this device into a mode where it would accept configuration commands. I have seen in the TFmini (non S) manual is a section that explains how to get into the configuration mode but nothing like that in the TFmini-S manual. I don’t want to chance the hex commands from the TFmini because the 1st few values are entirely different from the TFmini-S range of commands and I am not sure if that may cause issues and how much sanity checking if any is done. Has anybody had success to change the TFmini-S from UART to I2C, and if yes how did you do it ?
I have contacted the Benewake support as well and the crowd where I bought it from. Just perusing multiple avenues to get to the bottom of this.
I am currently using the SERIAL6 (FMU Debug) on my Pixhawk4 since I have no other UARTs free but I prefer to use I2C to not use up UART with devices that should be doing I2C.
Thank you, I have the manual but does not say anything how to put the TFmini-S into configuration mode. Using UART is not an option in the long run as stated above.
I think you deal with the same issue as @rickyg32 , but with a different TFMINI release.
The problem is basically an incompatibilit with the TFMINI driver (type 25) that expect a TFMINI PLUS registers that are different betweinn TFMINI (xx) and TFMINI PLUS.
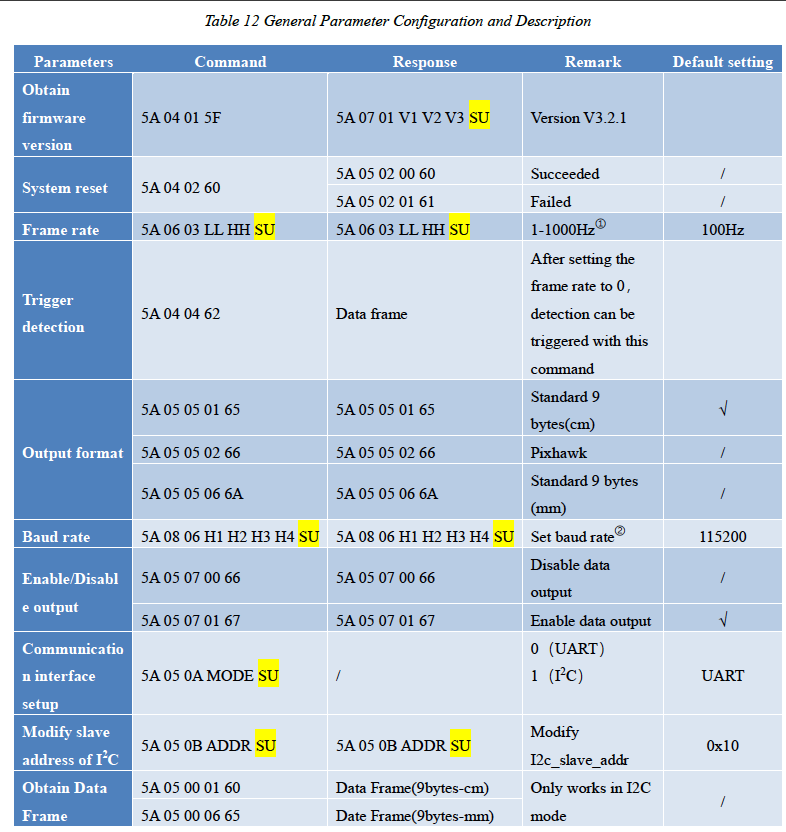
So even if you put your sensor in I2C (By sending this serie of Hex Characters under the Benewake GUI : 5A 05 0A 01) , you wont be able to get the range finder working with ardupilot.
Well, it turns out there is no such thing as configuration mode on that TFmini-S, it work if typing the hex code do the checksum and issue the safe command. HOWEVER now I have the range finder working kind of, its VERY slow updating, WAY slower than via UART and my on board I2C display wont work any longer. If I read that right the address of the SH1106 display is either 0x3c or 0x3d, that should not have issues on the same bus. But the lidar its not really any use with one update every 30 seconds or there about. I have also noticed since the last Mission Planner update 1.3.71 it all has gone VERY VERY sluggish and updates on screen are really slow motion. Guess thats a different matter. So I am back to square one, I am hesitant what to try next now. I am tempted to get a can bus lidar hoping that works better. I see Benewake has a few of those but I can not make out if they work with Ardupilot or not.
I had it running now for a while, its very unreliable. The ranges I get vary drastically between over 100cm to 10cm in the very same location pointing at the same surface. With UART that was not the case at all. So the TFmini-S is definitely a no go for I2C on current Ardupilot. Still wondering why the Display stops working because its on a different address. Is that a general limitation on Ardupilot ?
Thanks
Jan
PS: To get it back from I2C to UART I issued the following on a Linux CLI:
To verify its on address 0x10:
i2cdetect -y 1
Set UART:
i2cset -y 1 0x10 0x5a 0x50 0x0a 0x00 0x69 i
Save Settings:
i2cset -y 1 0x10 0x5a 0x04 0x11 0x6f i
Thanks for the suggestion, I will check if I find anything that works with Ardupilot. I have only started taking an interest in Quadcopters recently. So the Holybro X500 kit was a purchase to start getting into it and see how I like it and either leave it at that or move on to something bigger or something faster. Its a learning platform for me and one thing that I got very early on is to not waste any UARTs if at all possible. So my attitude is to use a bus where ever possible (CAN bus GPS next time for example) . On this quad its also about finding out how things work together in Arducopter, what is a gimmick and what is really useful. So for the next build I have hopefully a better idea what components to use and what traps to avoid.
I consider this issue solved now since it was established that TFmini (xxx) is not the same as TFmini, so I just purchased a incompatible sensor for my use case. I would still be interested to hear if people have any suggestions how this could have an impact on other I2C devices connected to the bus.
Wa Hooo
My I2C TFMini Plus or pro what ever it’s called arrived today.
So is there some command I need to give it to have it talk I2C or is it natively talking !2C
.
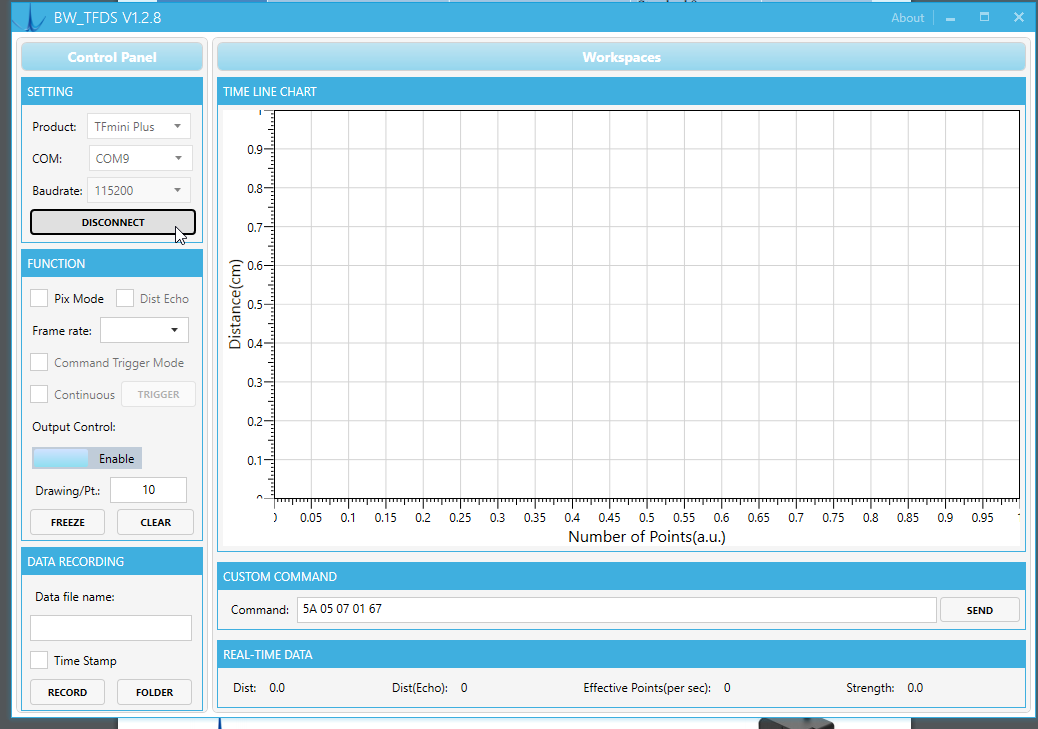
Well I connected it to teh TFMini Gui and get nothing on the screen.
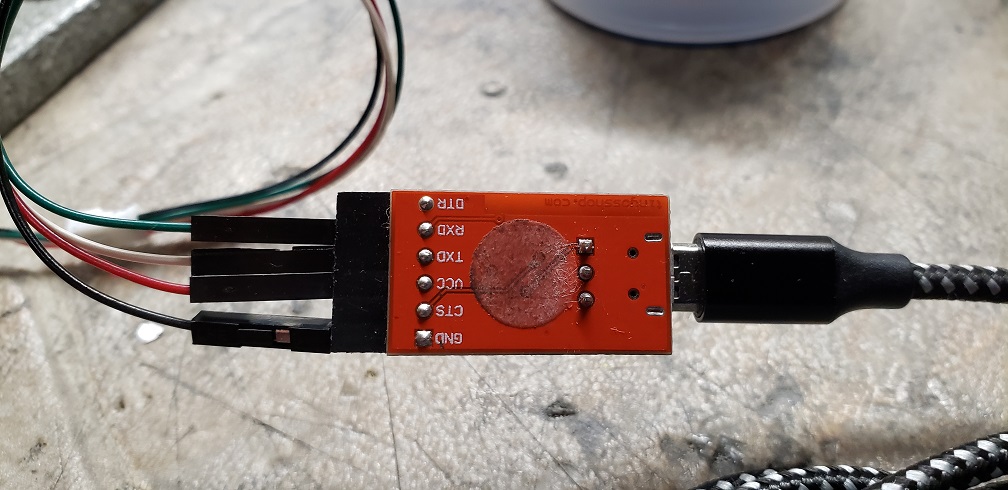
I have the TFMini connected via an TTL USB adapter as I have done many times before. But no go.
Any thoughts. I must be missing something.
when my TFmini-S arrived it was in factory default configuration which is UART, mine worked straight away in that mode and I had immediately the distance read out as graph in the GUI. If yours is set to I2C from the supplier then you wont be able to talk to it with UART. IDK how to talk to it via I2C in Windows. I have used a R-Pi and the Linux CLI. You can connect the Lidar to the GPIO header. The manual for your device should contain a pin out. If you google R-Pi pin out you will find plenty to go by, Just connect +5v, GND. On the R-Pi pin 4 and 6 for example, I2C is on pin 3 and 5, SDA and SCL. You need to install i2c-tools, that will provide i2cdetect and i2cset. You have to enable the I2C interface for example with rasrpi-config -> interfacing options -> i2c. The TFmini-S is by default on address 0x10, IDK how that is with the device you have. With i2cdetect you should see the address show up in the output.
I have learned with my experience that there is a difference with TFmini and TFmini X devices. So I guess you have to know the exact model to find out what is going on.
I am totally new to Lidars, so I can only speak from my very limited experience.
Regards
Jan P.
PS: IF it is indeed a UART device or configured for UART, watch out for the wiring RX <-> TX and TX <-> RX, otherwise you see nothing.
Hi Jan Paulini
I have the TFmini Plus. I have quadruple checked the wiring. IT appears to be connected correctly yet no output. Also I note that in the manual it indicates the default output is UART.
I can see that the device is working as the red led is lit. I am going to bung it into an I2C port and see if for what ever reason it’s set to I2C and not UART. Apart from that I am stumped.
I am kind of unsure how I shall proceed myself TBH re Lidar. I have been looking for affordable devices and only Benewake is coming up. I know now the TFmini-S I2C is not working for sure, Looking at the TF03 which is available as CAN bus model, Ardupilot does not state which TF03 models are supported as RNGFND?_TYPE. Value 27 BenewakeTF03. Its puzzling to me why a manufacturer has so many different protocols…
@rickyg32, you don’t have any other hardware to test the adapter ? From experience they need some tough handling to break. Maybe an Arduino or something ?
Not sure how to test it another way.
I agree that it takes a lot to break them. They are cheap enough so I ordered a couple just to be safe.
It’s clear from the gui it see’s no data