This one
Strange had my TFmini working great two days ago now it says its at 6.33 meters and doesn’t change…um…what the heck
1 Like
I am following the initial instructions of this group to test my TF mini version UART on arduplane with Matek F765 but I don’t see it active in Mission Planner.
I connect to the GUI > click on Pix mode > I also send it by command 42 57 02 00 00 00 04 06
SERIAL1_PROTOCOL=9
SERIAL1_BAUD=115
RNGFND_TYPE=20
RNGFND_SCALING=1
RNGFND_GNDCLEAR=3
RNGFND_MIN_CM=30
RNGFND_MAX_CM=500
RNGFND_ORIENT=25
but without success, any suggestions?
1 Like
I also have it configured like this:
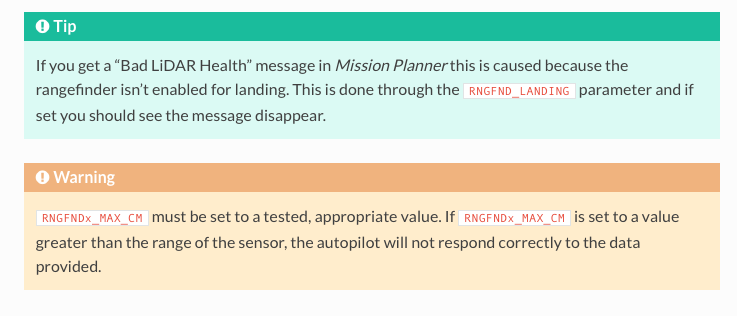
RNGFND_LANDING = 1
And
RNGFMD_MAX_CM = 500 (lower than the range of the sensor> 600)
It could be a connection problem (check the wiring) or a power supply problem. Did you try another serial (2 or 3…).
I have checked the wiring > in the GUI it works OK with FTDI
I test in SERIAL1 and SERIAL2
I have tested the TFmini on a Pixhawk1 2.4.8 and it works correctly >>> but not on the Matek F765
I will continue testing
It could be an electrical problem. Can you try to have an external 5V bec for direct power.
I just tried an external BEC and neither
Hello ~
Benewake have upgraded TFmini and TF02 to new model TFmini-S and TF02-Pro with better technical parameters and lower cost, welcome to check the LiDAR models comparasion below:
I think Benewake need to implement theTFmini Firmware on Matek F765.
Benewake is one step behind
Isn’t it the Arducopter firmware that determines if the TF Mini works on the Matek F765 board as the TF is just a UART or I2C device.
I think it depends on tf mini version…, im using the s version on a can node, uart and I2c can suffer a little bit the interferences but if you will use a twisted cable for can application you will see a different result
2 Likes
Unless you have very long cable or extremely noisy environment it should not make an impact on signal quality of serial or I2C. Until we can get cheap devices available on CAN, that alternative is still way too complicated and cumbersome for a single device connection
1 Like
I think that can bus can give more features and stability … of course everyone can choose his own way
Why in a pixhawk everything is OK and on
F765 it doesn’t recognize it? regardless of I2C / CAN bus
TELM2 on F765 (F7) is one USART (no UART). >>> SERIAL2_OPTIONS (halfduplex/Tx & Rx inverted) ???
i don’t think that your fc support the can bus…, aside this tf mini uart/i2c can be used on a can node… but as long as your fc don’t have the CAN PORT you cannot use it.
if i remember well f7 support the reverse signal via software
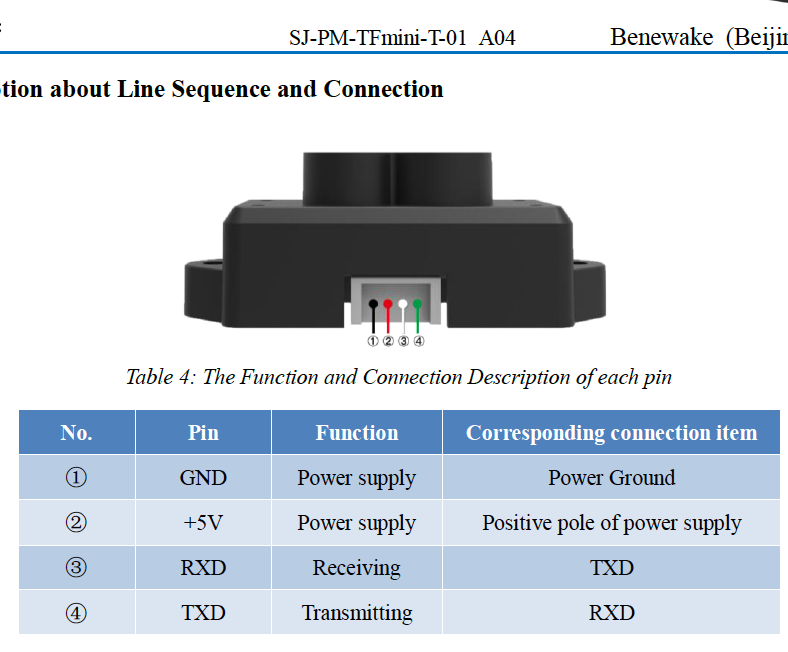
My TFmini is UART type.
Connecting it to Pixhawkit 1 works perfectly but connecting it to a Matek F765 does not recognize it
Seems an UART wiring of the sensor on your fc or a setting